动动手指,关注公众号并加星标哦

(1) 看到这幅图,觉得很惊艳

作为射频硬件工程师的我,看到下面的这幅图,感觉到很神奇,不知道你们有没有。
左边几乎都看不出啥来的接收信号,经过匹配滤波器后,信号看上去变得如此之好。
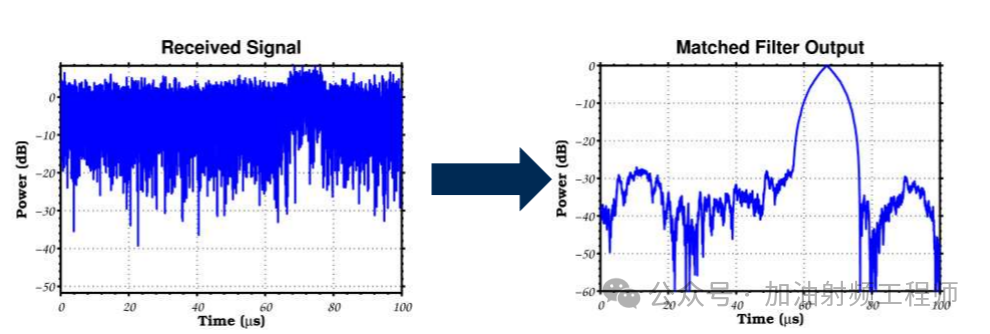
这个匹配滤波器,到底有什么神奇之处,能化腐朽为神奇呢?

(2) 什么是匹配滤波器?

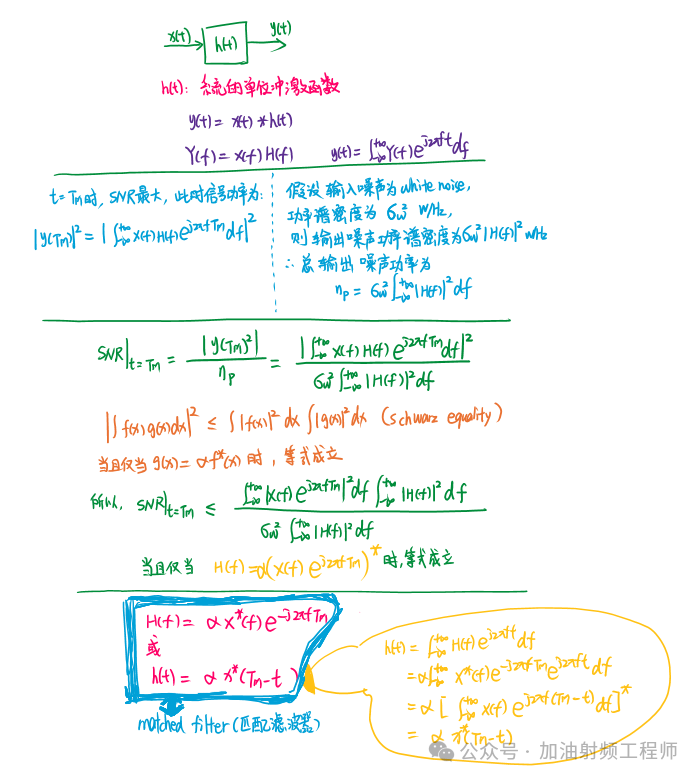
匹配滤波器,是为了在某个时刻处,得到最大的SNR而存在的。
从上面的推导可以看到,要想得到最大的SNR,匹配滤波器不是随便选的,是与输入信号相关的。也就是说,输入信号和匹配滤波器是成对的,不同的输入信号对应不同的匹配滤波器。
假设输入信号中包括有用信号和噪声,记为x'(t),那么其经过对应的匹配滤波器后的输出为:
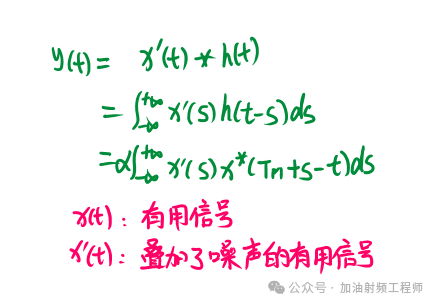
因此,匹配滤波器的输出,是接收到的信号x'(t)与发射波形x(t)的互相关函数,并且在TM-t处进行评估。
所以,可以把匹配滤波器看成是一个相关器(correlator),并且以发射波形为参考信号。
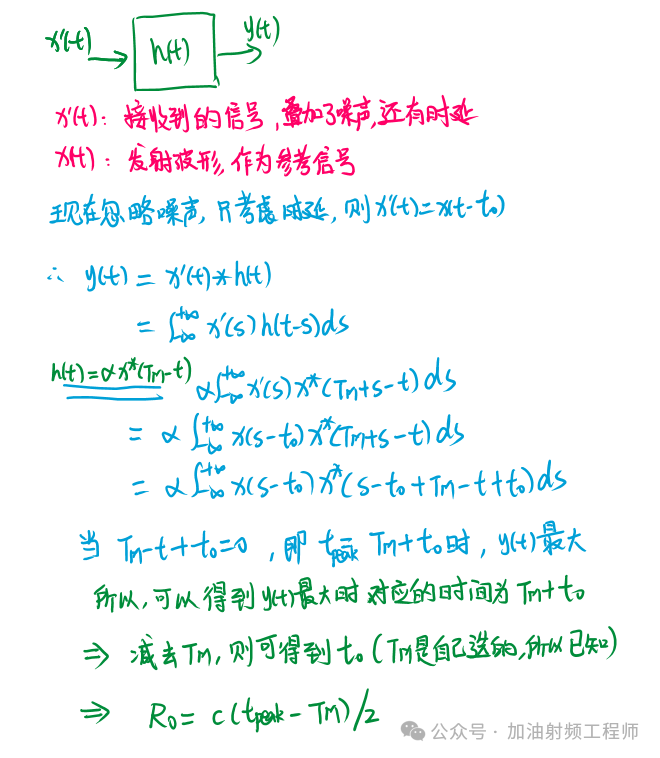
(3) 匹配滤波器有什么作用呢?
有了匹配滤波器,可以让我们在某个时刻TM,获得最大的SNR。这个TM值,除了要求TM>τ来保证h(t)的因果性外,其他好像没有什么要求。
不过,在借助这个匹配滤波器找到最大的SNR后,有什么作用呢?
答案是,可以帮助我们来确定目标的距离。
假设有一个目标,距离雷达的距离为R0,对应时延为t0=2*R0/c。
那么从匹配滤波器的输出,可以得到这个距离R0,确切的说,可以得到延时t0,进而换算出对应的距离,具体推导如下图所示。
(4) SystemVue中的相关例子解读
SystemVue中,有一个关于匹配滤波器的例子,名为Matched Filter。
其中关于脉冲波形的框图如下图所示。
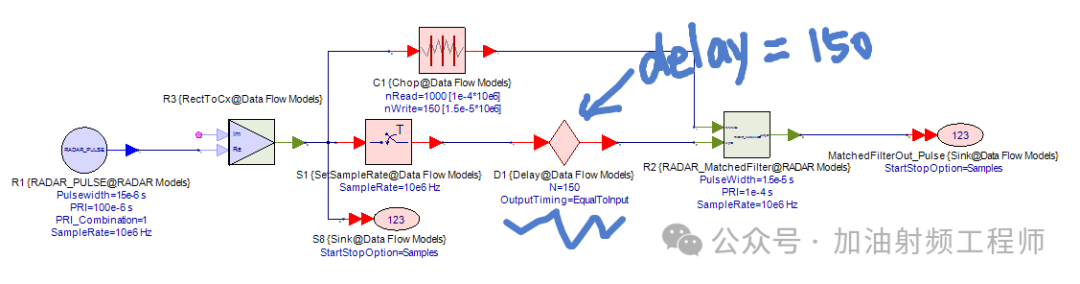
其中,输入至matched filter的信号引入了N=150的偏移,最后仿真出来的结果为:
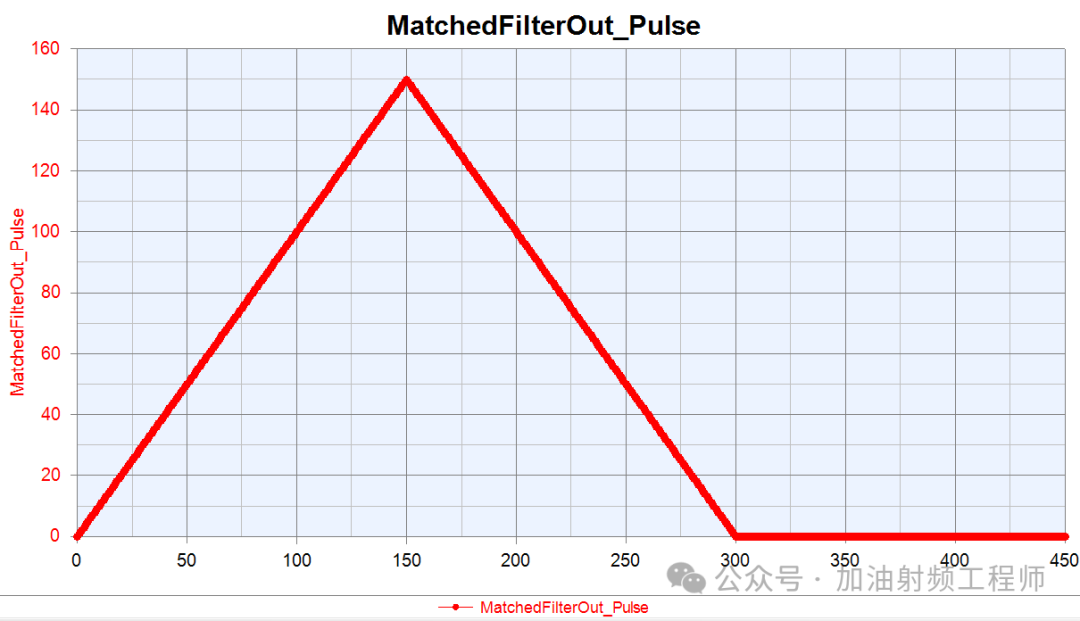
第一个最大值,在N=150处。
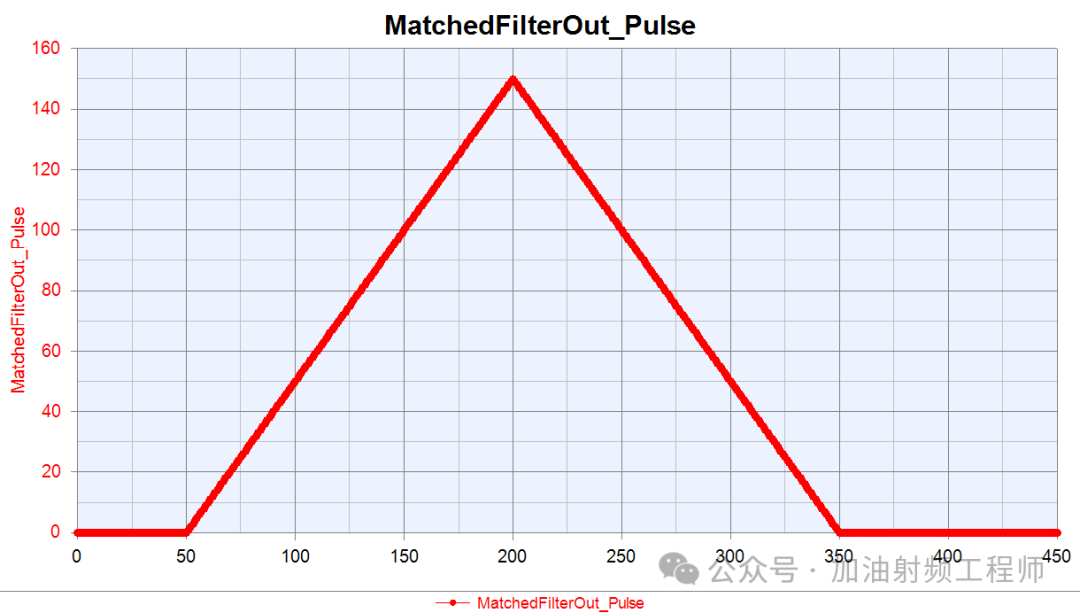
如果把N改成200,则仿真结果会变成N=200.
查看matched filter,可以看到其对matched filter的讲解,即是参考文献[3]。

从结果来看,matched filter模型内部,应该已经减掉了TM,直接给出了延时t0.
参考文献:
[1] https://its.ntia.gov/media/31078/DavisRadar_waveforms.pdf
[2] 陈爱军,深入浅出通信原理
[3] Mark A. Richards,Fundamentals of Radar Signal Processing,chapter 4


完结接收机课程吆喝处哈(已在平台上购买的同学,加我微信,领课件资料哈!)
想了解接收机的底层理论知识,可以选择这门课;
想了解ADS的系统仿真,可以选择这门课;
想了解SystemVue的系统仿真,可以选择这门课。
每个分指标的计算后面,都跟着一个仿真验证。所有指标都分配完了以后,还会有一个整体链路的仿真。
整体链路仿真,还分单音时候的验证+调制信号的验证;ADS仿完,再用SystemVue走一遍。
这些仿真步骤,该采用什么模板,各个参数该怎么设置,该用什么等价标准来判断,都是我花了很长时间探索,才联通起来的。
我觉得大概率是全网独一份,因为这些都是我结合软件自带的help文件和模板,再结合项目,一点一点探索出来的,有很多自己的想法在里面。
想报名的同学,可以海报底部扫码哈!
☜左右滑动查看更多
Slide for more photos