血管内超声利用导管技术将微型超声探头送入血管内提供横截面影像,在介入手术中起到重要的辅助决策作用,其临床价值在全球范围内得到普遍认可。然而,传统机械旋转式超声导管由体外末端电机驱动钢丝软轴带动前端单阵元换能器高速旋转扫描成像,在复杂血管区域成像时面临操控不灵活、探头非均匀旋转等技术挑战。因此,探究能在复杂血管区域灵活操控、稳定成像的新型超声导管,是心脑血管疾病精准诊疗的迫切需求。
近日,中国科学院苏州医工所崔崤峣研究员团队成功研发了一种双模式磁驱血管内超声机器人,由前端探头和后端导管组成。该设计取消了钢丝轴结构,实现了小尺寸和高柔性。导航模式下,机器人在静态磁场作用下执行可控弯曲,在分叉血管处可主动进入目标分支;成像模式下,机器人在动态磁场下执行声束扫描,提供高分辨率超声图像。双模式磁驱血管内超声机器人同时提高了介入过程中的操作灵活性和成像稳定性,为复杂血管腔内可视化提供了潜在解决方案。
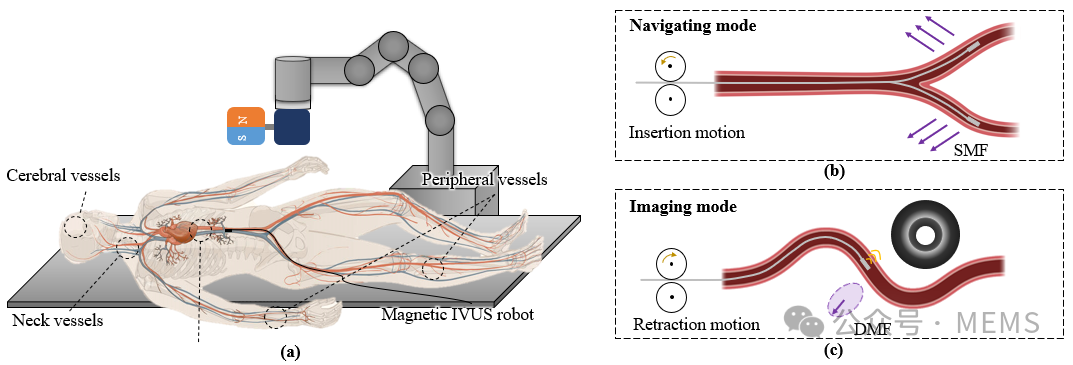
图1 磁驱血管内超声机器人工作示意图
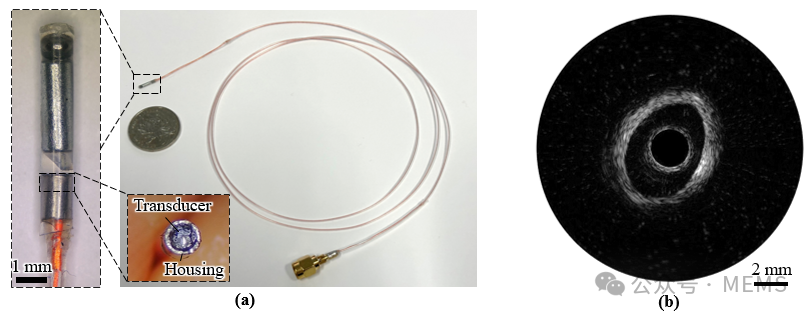
图2 磁驱血管内超声机器人原型样机及成像结果
相关结果发表在IEEE/ASME Transactions on Mechatronics期刊上(中国科学院一区),崔崤峣研究员、焦阳副研究员为共同通讯作者。
论文链接:
https://ieeexplore.ieee.org/document/10529586