关注+星标公众号,不错过精彩内容

转自 | 羽林君
总述
1. 简单的顺序执行程序:这类写法是大多数人使用的方法,不需用思考程序的具体架构,直接按照执行顺序编写应用程序即可。
这种应用程序比较简单,一般作为初阶简单使用,实时性以及要求不太高的情况下,可以使用。程序的设计比较简单,思路比较清晰。但是主循环的逻辑比较复杂的时候,如果没有完整的流程图指导,其他人很难看懂程序运行逻辑。
下面写一个顺序执行的程序模型
int main(void){uint8 TaskValue;InitSys(); // 初始化while (1){TaskValue= GetTaskValue();switch (TaskValue){case x:TaskDispStatus();break;...default:break;}}}
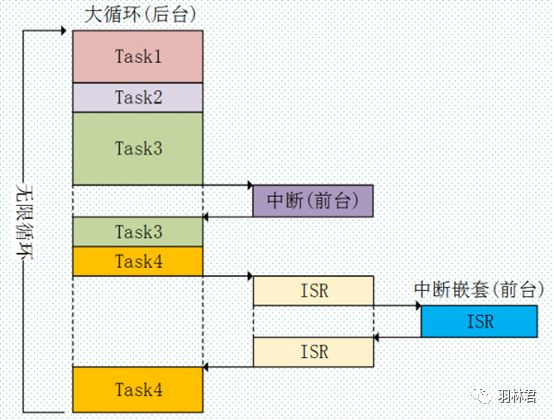
这种程序特点是,后台大循环中一直执行默认的程序,中断服务程序(ISR)产生相应中断标记,主程序运行与中断标记相关联的任务程序。一般实现有如下思路:
通过设置标志变量,然后在前台响应中断的时候进行对标志变量的置位或者复位,实现事件的信号获取,再在后台主循环进行中断所对应事物或者数据的处理,将程序流程转移到主程序。
前后台执行的程序
void IRQHandler(void){if(GetITStatus == 1){SysFlag = 1;GetITStatus = 0;}}int main(void){uint8 TaskValue;InitSys(); // 初始化while (1){TaskValue= GetTaskValue();switch (TaskValue){case x:if(SysFlag == 1){TaskDispStatus();SysFlag == 0;}break;...default:break;}}}
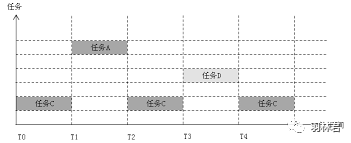
时间片轮循法,大家看到它的时候,一般会将它与操作系统进行比较。不是说操作系统包含这种方法,而是在前后台程序中配合时间管理形成时间片轮循架构。
这种架构已经最大限度接近RTOS,时间管理,中断管理,任务管理,已经都有了,只不过RTOS会对内核进行更深入的修改,有针对delay延时的线程切换,抢占式任务切换这些更为复杂一些的功能等。
时间片轮循程序
时间片管理主要是通过对定时多处复用,在定时器计数,定时进行标志位的变化,继而主程序对标志真假的判断,实现不同时间不同任务状态执行。
因为此架构代码比较好,我适当进行详细描述。
step
1:初始化相应的定时器:注意设置定时器的间隔频率,可以按照芯片的性能设置。例如,设置定时中断为1ms,也可以设置为10ms,轮循架构中的定时器部分与操作系统的定时器部分具有一样的功能,中断过于频繁,影响主程的序执行效率;中断间隔过长,实时响应效果差。
2:针对定时器运行的任务设置一个函数结构体标志,用来在定时程序进行时间计数以及标志操作。
__packed typedef struct{u8 flag; //定时标志u32 numcount;//按照定时中断进行计数u32 target; //设置的定时目标数值int(*fun)(void);//设置定时执行的目标任务函数}TaskTimTypeDef
step
3:建立一个任务表,通过结构体表的设置,确定任务执行的时间表。
在定义变量时,我们已经初始化了值,这些值的初始化,非常重要,跟具体的执行时间优先级等都有关系,这个需要自己掌握。
/*MdmSendTimTab任务函数默认周期,单位5ms,TIM7*/static TaskTimTypeDef TaskTimTab[TaskTAB_NUM] ={{1, 0, 30000, *Task00}, //Task00 3000数值是设置的定时目标值,如果觉得反应过慢,可以将此值设置小{1, 0, 3000, *Task01}, //Task01{1, 0, 300, *Task02}, //Task02{1, 0, 30, *Task03}, //Task03{1, 0, 3, *Task04}, //Task04{1, 0, 0xFFFFFFFF, *Task05}, //Task05//可以按照TaskTAB_NUM数量添加任务};int Task00(void)//按照结构体的函数模板(int(*fun)(void);)写任务函数{...}//假设执行按键操作int Task01(void){...}//假设执行USART发送任务int Task02(void){...}//假设执行CAN通讯int Task03(void){...}//假设执行继电器控制int Task04(void){...}//假设执行网络解析int Task06(void){...}//假设执行空
step
4:定时中断服务函数,按照我们需要的时间以及标志操作进行计时。
//定时中断服务函数void TimerInterrupt(void){for(char i=0; i<TaskTAB_NUM; i++){if(TaskTimTab[i].flag == 1){(TaskTimTab[i].numcount< TaskTimTab[i].target)//比较目前定时计数与目标时间(TaskTimTab[i].numcount++):(TaskTimTab[i].flag = 0);}}}
step
5:主函数进行任务函数执行。
int main(void){InitSys(); // 初始化while (1){for(char i=0; i<TaskTAB_NUM; i++)//// 任务处理{if(TaskTimTab[i].flag == 0){if(TaskTimTab.flag == 0){TaskTimTab[i].flag = 1;TaskTimTab[i].numcount= 0;TaskTimTab[i].fun();}}}}
嵌入式操作系统是更加优化的执行框架,针对多任务,功能复杂,扩展性要求强项目的代码有非常好的使用。RTOS是针对不同处理器优化设计的高效率实时多任务内核,RTOS可以面对几十个系列的嵌入式处理器MPU、MCU、DSP、SOC等提供类同的API接口,这是RTOS基于设备独立的应用程序开发基础。因此,基于RTOS的C语言程序具有极大的可移植性。目前针对微嵌入式或者单片机的操作系统有VxWorks、UCOS、Free RTOS、国产的RTT,这些操作系统大同小异,基本的功能都类似:任务管理、任务间同步和通信、内存管理、实时时钟服务、中断管理服务。
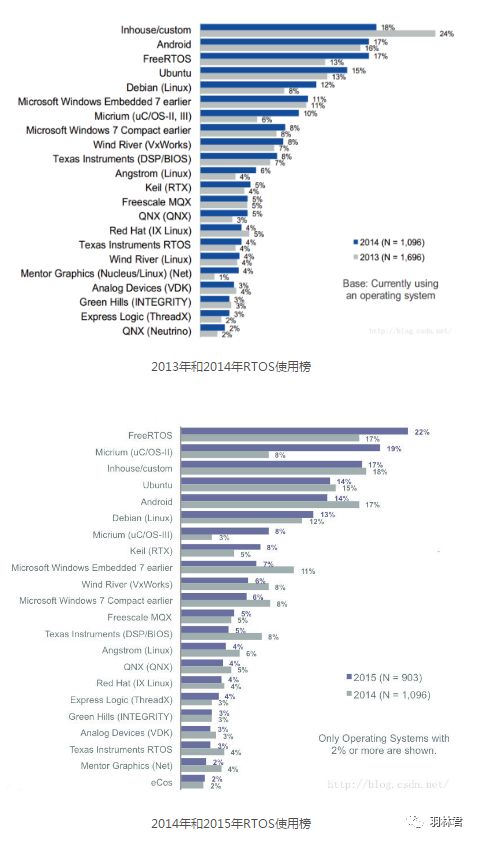
(图片来源博客)
RTOS在时间轮循的架构上继续增加了任务挂起以及恢复,阻塞切换线程等,属于功能累加,进一步的优化。由于本次不是对RTOS的讲解,本人学习应用有UCOS、RTT、Free RTOS几个操作系统,因为篇幅有限,时间有限,我抽时间再进行详细的RTOS系统架构学习等的介绍。
目前RTOS系统有很多,很多项目都倾向于使用RTOS,但是通过几种架构的分析明白不同的项目需要不同的架构,并不是所有项目都需要,也都适合使用RTOS,例如项目中各个任务耦合性过大,如果用RTOS需要很多的任务同步,甚至都无法进行线程的规划。这样就完全失去RTOS意义,此时用某些裸机的架构反而更合适。
C语言预处理命令分类和工作原理
C语言printf()函数具体解释和安全隐患
单精度、双精度、多精度和混合精度计算的区别是什么?

点击“阅读原文”查看更多分享,欢迎点分享、收藏、点赞、在看。
