
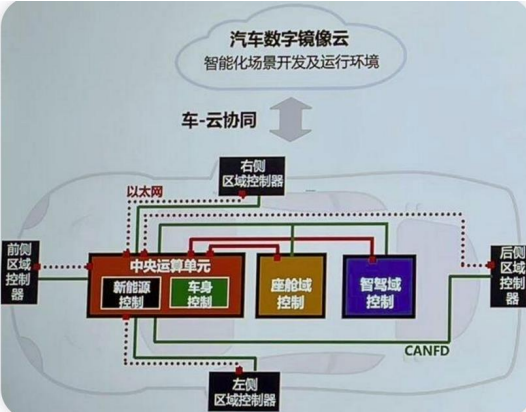
未来汽车产品最核心的技术是电子电气架构,汽车电子电气架构由分散式、嵌入式逐渐向集中式、集成式的方向发展,最终的理想状态应该是形成一个汽车中央大脑(one brain),统一管理各种功能。电子电气架构类似于“中央政府”,可对汽车的各种功能进行统筹管理,避免“诸侯割据、政令不一”。开始的时候这个“中央政府”可能会管得少一些,“地方诸侯”还依然保有一定控制权,但之后“中央政府”一定会管得越来越多,最终地方行政机构只接收“中央政府”指令并予以高效执行,以确保车辆整体表现最优。
一 奥迪A8小试牛刀
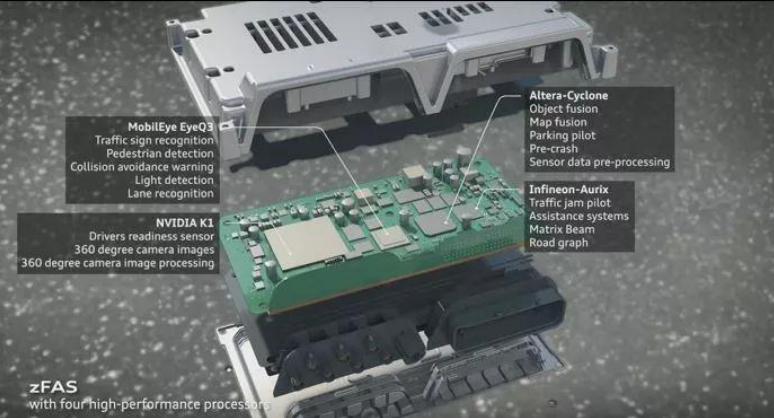
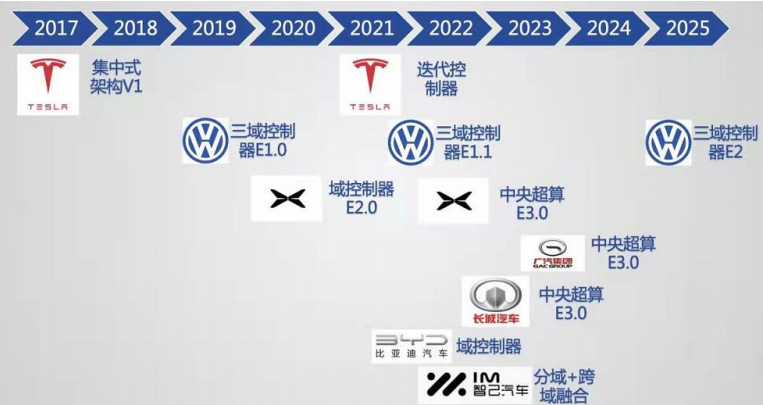
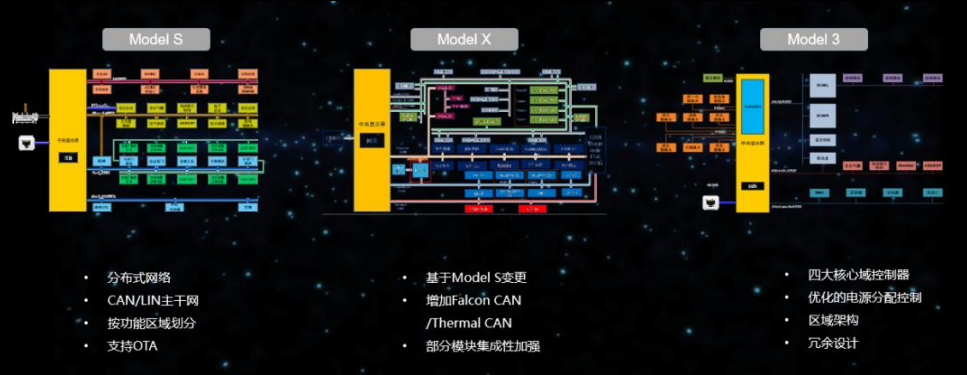
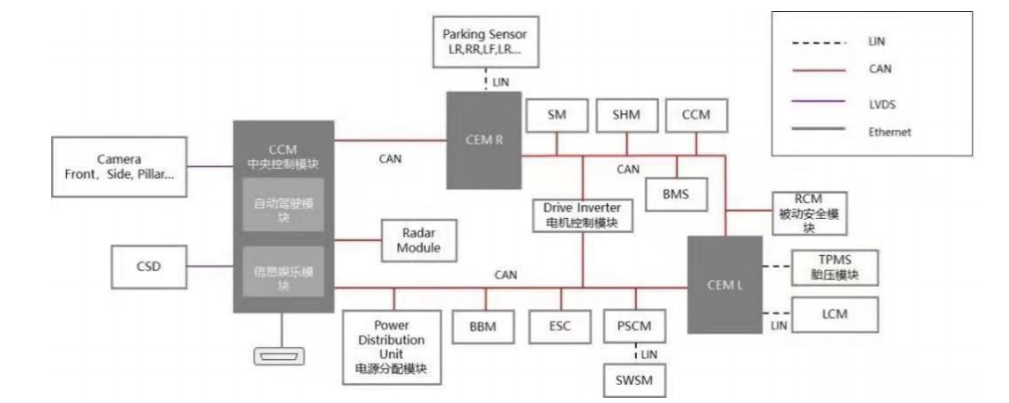
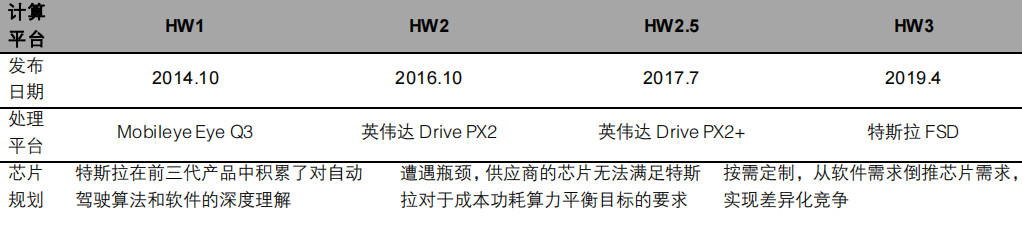
二 特斯拉Model3开启电子电气架构的全面变革
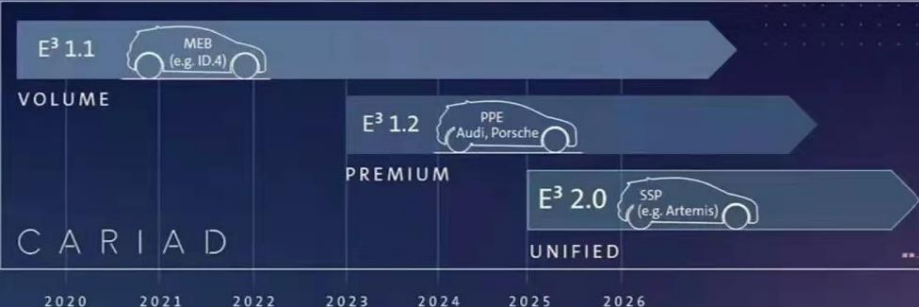
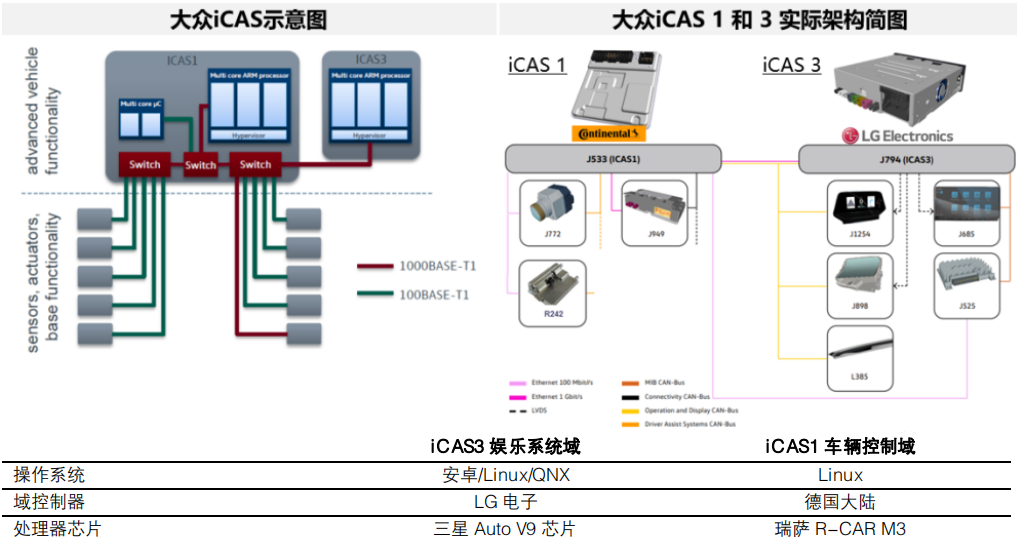
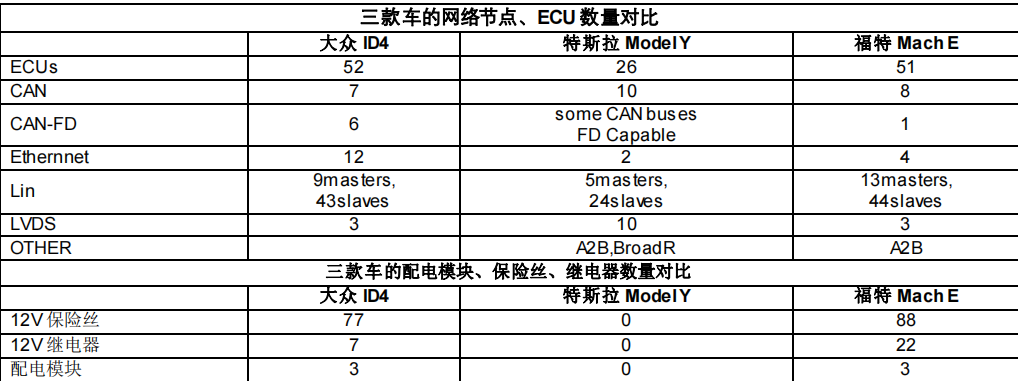
三 大众 ID 系列电子电气架构

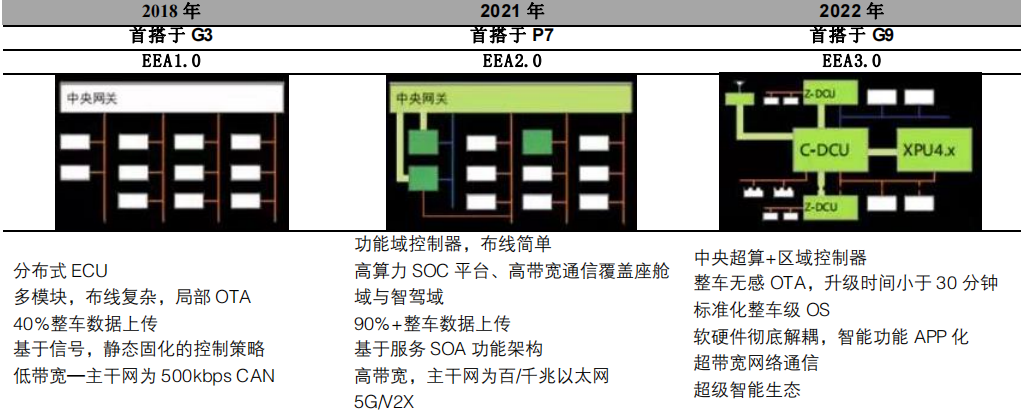
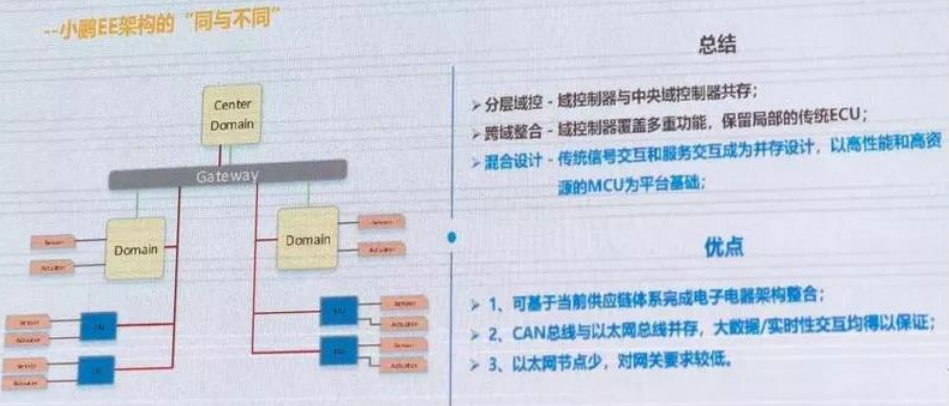
四 小鹏汽车 G9 电子电气架构具领先性

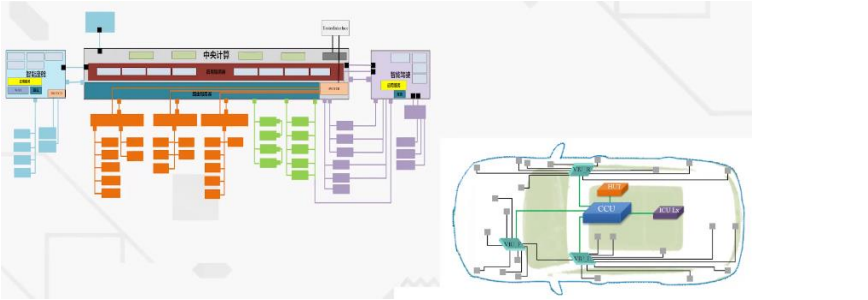
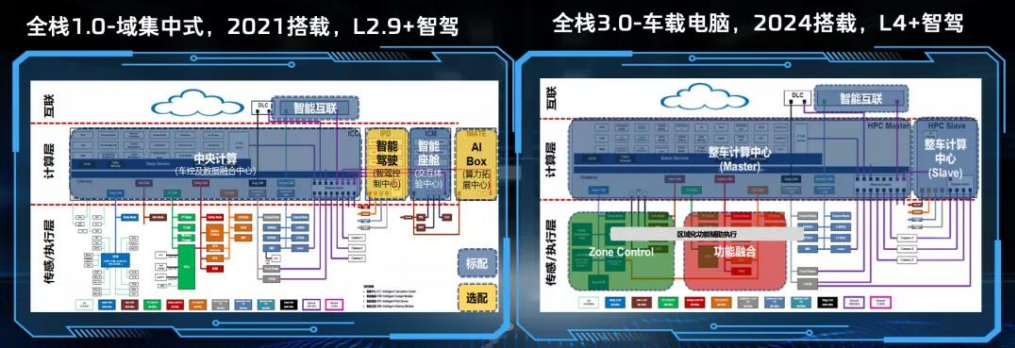
五 长城汽车电子电气架构发展路线图

2022 年内将推出的第四代电子电气架构将进一步集中整车控制软件,实现高效集成管理、高度安全可靠和更快需求响应。
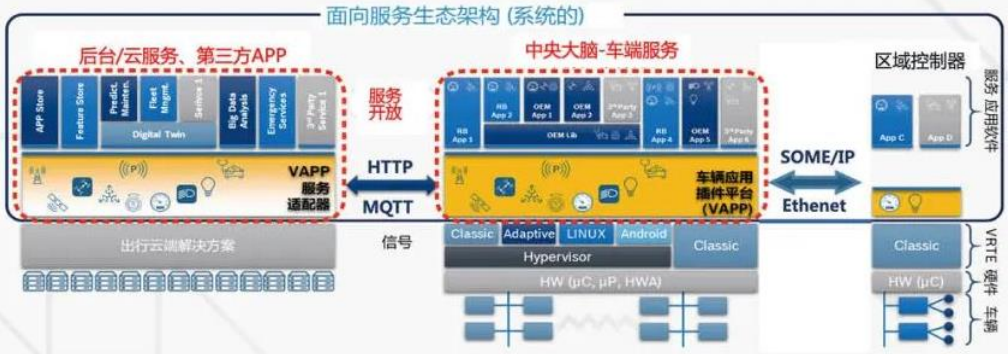
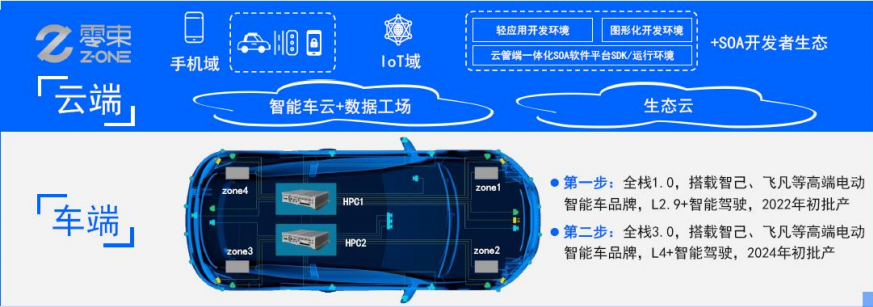
六 上汽零束电子电气架构
七 广汽星灵电子电气架构

来源:线束时间
编辑 ▎于永初
-END-