在Linux多线程编程中,互斥锁(Mutex)是一种非常重要的同步机制,用于控制对共享资源的访问,确保在任意时刻只有一个线程可以访问特定的资源或代码段,即临界区。互斥锁的主要用途是防止多个线程同时访问共享资源,从而避免竞争条件和数据不一致的问题。
互斥锁的工作原理相对简单,它通过锁定和解锁操作来控制对共享资源的访问。当一个线程需要访问共享资源时,它首先尝试锁定互斥锁。如果互斥锁已经被其他线程锁定,请求线程将被阻塞,直到互斥锁被解锁。互斥锁的锁定和解锁操作必须是成对出现的,以确保对共享资源的正确访问。
在 Linux 中,互斥锁通常通过 POSIX 线程库(pthread)来实现。pthread 库提供了一系列的函数来创建、初始化、锁定、解锁和销毁互斥锁,如pthread_mutex_init()、pthread_mutex_lock()、pthread_mutex_unlock()和pthread_mutex_destroy()等。互斥锁的初始化是通过pthread_mutex_init()函数完成的,该函数会分配必要的资源来创建一个互斥锁,并将其初始化为未锁定状态。
pthread_mutex_t 是 POSIX 线程库中用于互斥锁的数据类型。以下是一些与 pthread_mutex_t 相关的函数原型:
初始化互斥锁:
int pthread_mutex_init(pthread_mutex_t *restrict mutex, const pthread_mutexattr_t *restrict attr);
mutex:指向 pthread_mutex_t 结构的指针,用于初始化互斥锁。attr:指向 pthread_mutexattr_t 结构的指针,包含互斥锁的属性。如果为 NULL,则使用默认属性。销毁互斥锁:
int pthread_mutex_destroy(pthread_mutex_t *mutex);
mutex:指向已经初始化的 pthread_mutex_t 结构的指针。销毁互斥锁前,确保互斥锁没有被锁定。锁定互斥锁:
int pthread_mutex_lock(pthread_mutex_t *mutex);
mutex:指向已经初始化的 pthread_mutex_t 结构的指针。如果互斥锁已经被其他线程锁定,则调用线程将被阻塞,直到互斥锁被解锁。尝试锁定互斥锁(非阻塞):
int pthread_mutex_trylock(pthread_mutex_t *mutex);
mutex:指向已经初始化的 pthread_mutex_t 结构的指针。如果互斥锁已经被锁定,则立即返回错误码 EBUSY,而不是等待互斥锁变为可用。定时锁定互斥锁(可指定超时时间):
int pthread_mutex_timedlock(pthread_mutex_t *restrict mutex, const struct timespec *restrict abstime);
mutex:指向已经初始化的 pthread_mutex_t 结构的指针。abstime:指向 timespec 结构的指针,包含超时时间。如果超时时间到达,互斥锁仍未解锁,则返回 ETIMEDOUT。解锁互斥锁:
int pthread_mutex_unlock(pthread_mutex_t *mutex);
mutex:指向已经初始化且当前被调用线程锁定的 pthread_mutex_t 结构的指针。调用此函数将释放互斥锁,允许其他线程锁定它。注意:互斥锁的初始化方式主要有两种:静态初始化和动态初始化。
静态初始化: 使用宏
PTHREAD_MUTEX_INITIALIZER可以在声明互斥锁变量时直接初始化。这种方式是编译时初始化,无需调用初始化函数。例如:pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;这种方式适用于静态分配的互斥锁,即在程序的整个生命周期内都存在的锁。
动态初始化: 使用
pthread_mutex_init()函数可以在程序运行时初始化互斥锁。这种方式需要显式调用函数进行初始化和销毁,适用于需要动态创建和销毁的互斥锁。例如:pthread_mutex_t *mutex = malloc(sizeof(pthread_mutex_t));
pthread_mutex_init(mutex, NULL); // NULL 表示使用默认属性使用动态初始化时,需要在不再需要互斥锁时调用
pthread_mutex_destroy()来销毁它,并释放分配的内存。互斥锁的属性可以在初始化时指定,如果不设置属性(即使用
NULL或默认属性),则使用系统默认的互斥锁属性。在Linux系统中,属性可以用来定义不同类型的互斥锁,例如:
普通互斥锁( PTHREAD_MUTEX_TIMED_NP)递归互斥锁( PTHREAD_MUTEX_RECURSIVE_NP)错误检查互斥锁( PTHREAD_MUTEX_ERRORCHECK_NP)适应性互斥锁( PTHREAD_MUTEX_ADAPTIVE_NP)正确初始化互斥锁对于避免潜在的同步问题是非常重要的。使用静态初始化可以简化代码并减少出错机会,而动态初始化提供了更大的灵活性。在实际编程中,应根据具体需求选择适合的初始化方式。
这些函数是 POSIX 线程库中用于线程同步的基础,通过它们可以安全地在多线程程序中控制对共享资源的访问。
互斥锁是一种简单的加锁的方法来控制对共享资源的访问,互斥锁只有两种状态,即上锁( lock )和解锁(unlock),如果互斥量已经上锁,调用线程会阻塞,直到互斥量被解锁。在完成了对共享资源的访问后,要对互斥量进行解锁。
互斥锁特点如下:
cpu 资源),直到第一个线程解除对这个互斥量的锁定为止,第二个线程则被唤醒并继续执行,同时锁定这个互斥量。互斥锁是一种【独占锁】,比如当线程 A 加锁成功后,此时互斥锁已经被线程 A 独占了,只要线程 A 没有释放手中的锁,线程 B 加锁就会失败,于是就会释放 CPU 让给其他线程,既然线程 B 释放掉了 CPU,自然线程 B 加锁的代码就会被阻塞。
对于互斥锁加锁失败而阻塞的现象,是由操作系统内核实现的。当加锁失败时,内核会将线程置为【睡眠】状态,等到锁被释放后,内核会在合适的时机唤醒线程,当这个线程成功获取到锁后,于是就可以继续执行。如下图:
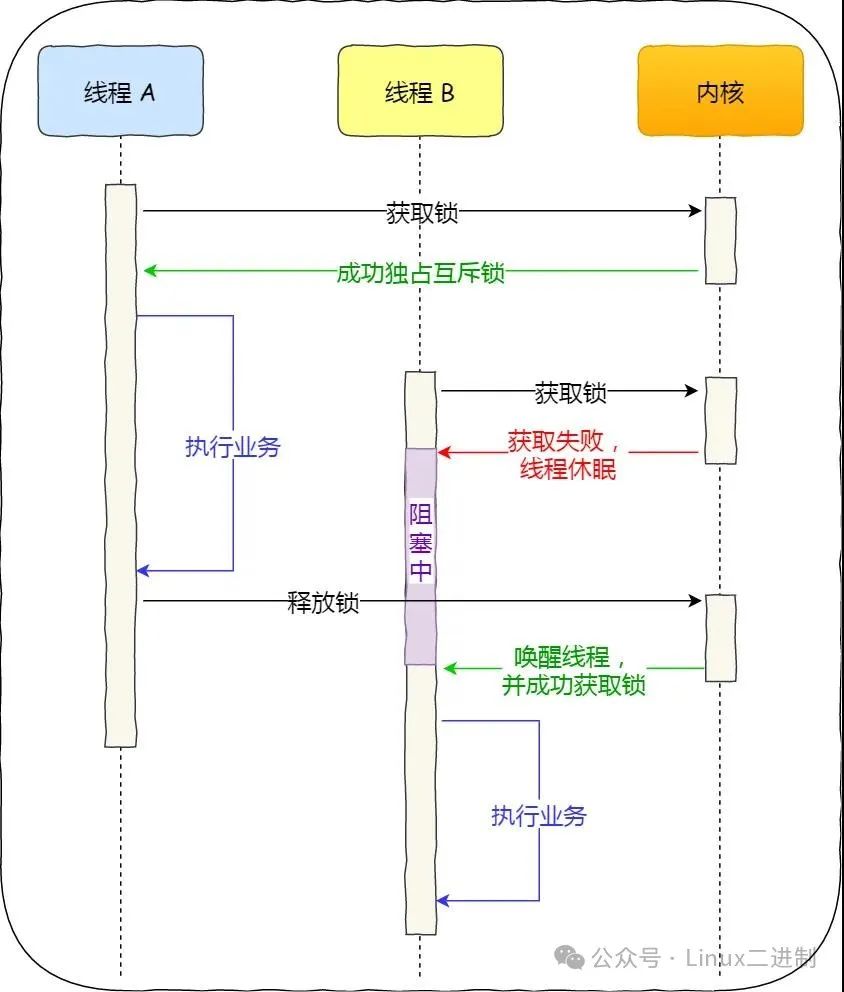
所以,互斥锁加锁失败时,会从用户态陷入到内核态,让内核帮我们切换线程,虽然简化了使用锁的难度,但是存在一定的性能开销成本。
那这个开销成本是什么呢?会有两次线程上下文切换的成本:
当线程加锁失败时,内核会把线程的状态从【运行】状态设置为【睡眠】状态,然后把 CPU 切换给其他线程运行;
接着,当锁被释放时,之前【睡眠】状态的线程会变为【就绪】状态,然后内核会在合适的时间,把 CPU 切换给该线程运行。
线程的上下文切换的是什么?当两个线程是属于同一个进程,因为虚拟内存是共享的,所以在切换时,虚拟内存这些资源就保持不动,只需要切换线程的私有数据、寄存器等不共享的数据。
上下切换的耗时有大佬统计过,大概在几十纳秒到几微秒之间,如果你锁住的代码执行时间比较短,那可能上下文切换的时间都比你锁住的代码执行时间还要长。
所以,如果你能确定被锁住的代码执行时间很短,就不应该用互斥锁,而应该选用自旋锁,否则使用互斥锁。
互斥锁导致的死锁是多线程编程中的一个常见问题。死锁发生时,两个或多个线程被无限期地阻塞,因为它们在等待对方释放锁。以下是一些关于互斥锁死锁的信息:
死锁的条件:死锁通常发生在以下四个条件同时满足时:
死锁的避免:可以通过以下几种策略来避免死锁:
pthread_mutex_trylock() 或其他带有超时功能的加锁方法。死锁的解除:如果检测到死锁,可以采取以下措施:
避免嵌套锁:尽量减少锁的嵌套使用,如果必须嵌套使用,确保内层锁总是不同类型的或者使用不同的加锁顺序。
锁的分级管理:将锁分级,高级别的锁可以包含多个低级别的锁,确保在请求高级别锁时,已经持有所有需要的低级别锁。
通过采取这些措施,可以降低死锁发生的风险,并提高多线程程序的稳定性和可靠性。
以下是一个简单的示例代码,展示了如何在多线程环境中使用 pthread_mutex_t 来同步对同一个文件的读写操作:
#include
#include
#include
#define NUM_THREADS 5 // 定义宏来设置线程数量
pthread_mutex_t file_mutex = PTHREAD_MUTEX_INITIALIZER; // 全局互斥锁
const char *data_to_write = "Thread data\n";
void perform_file_write(const char *filename) {
FILE *fp = fopen(filename, "a");
if (fp == NULL) {
perror("Error opening file for write");
return;
}
pthread_mutex_lock(&file_mutex); // 加锁
fputs(data_to_write, fp);
pthread_mutex_unlock(&file_mutex); // 解锁
fclose(fp);
}
void perform_file_read(const char *filename) {
FILE *fp = fopen(filename, "r");
if (fp == NULL) {
perror("Error opening file for read");
return;
}
char buffer[256];
pthread_mutex_lock(&file_mutex); // 加锁
while (fgets(buffer, sizeof(buffer), fp) != NULL) {
printf("%s", buffer); // 打印读取的数据
}
pthread_mutex_unlock(&file_mutex); // 解锁
fclose(fp);
}
void *thread_function(void *arg) {
int is_write = *(int *)arg; // 根据传入的参数决定操作类型
const char *filename = "example.txt"; // 要操作的文件名
if (is_write) {
perform_file_write(filename);
} else {
perform_file_read(filename);
}
return NULL;
}
int main() {
int *args = malloc(NUM_THREADS * sizeof(int)); // 动态分配参数数组
if (args == NULL) {
perror("Failed to allocate memory for args");
return 1;
}
pthread_t threads[NUM_THREADS];
for (int i = 0; i < NUM_THREADS; ++i) {
args[i] = (i == 0); // 第一个线程执行写操作,其余执行读操作
if (pthread_create(&threads[i], NULL, thread_function, &args[i]) != 0) {
perror("Failed to create thread");
free(args);
return 1;
}
}
for (int i = 0; i < NUM_THREADS; ++i) {
pthread_join(threads[i], NULL);
}
free(args); // 释放参数数组
// 静态初始化的互斥锁不需要显式销毁
return 0;
}
在这个示例中,创建了一个互斥锁 file_mutex 来同步对文件 example.txt 的访问。使用 PTHREAD_MUTEX_INITIALIZER 直接初始化互斥锁,无需再调用pthread_mutex_init 函数了。我们定义了 perform_file_read 和 perform_file_write 函数来执行实际的文件读写操作,并在这些操作前后使用 pthread_mutex_lock 和 pthread_mutex_unlock 来确保每次只有一个线程可以访问文件。在 main 函数中,创建了一个线程数组,并设置第一个线程执行写操作,其余线程执行读操作。使用 perror 来打印出创建线程或文件操作失败时的错误信息。最后,我们在主函数中等待所有线程完成,并且由于使用了静态初始化互斥锁,我们不需要调用 pthread_mutex_destroy 来销毁互斥锁。
程序运行结果如下:
[root@localhost multi_pthread_file]# ./multi_pthread_file_rw
Thread data
Thread data
Thread data
Thread data
[root@localhost multi_pthread_file]# cat example.txt
Thread data
通过程序运行结果可知,我们通过给写操作和读操作加互斥锁,成功实现我们预期的目标,即写一次数据,读四次数据。
以下是一个 C 语言中可能导致死锁的互斥锁代码示例:
#include
#include
#include
pthread_mutex_t mutex1;
pthread_mutex_t mutex2;
void *thread1Function(void *arg) {
pthread_mutex_lock(&mutex1);
printf("Thread 1 acquired mutex1\n");
sleep(1);
pthread_mutex_lock(&mutex2);
printf("Thread 1 acquired mutex2\n");
pthread_mutex_unlock(&mutex2);
pthread_mutex_unlock(&mutex1);
return NULL;
}
void *thread2Function(void *arg) {
pthread_mutex_lock(&mutex2);
printf("Thread 2 acquired mutex2\n");
sleep(1);
pthread_mutex_lock(&mutex1);
printf("Thread 2 acquired mutex1\n");
pthread_mutex_unlock(&mutex1);
pthread_mutex_unlock(&mutex2);
return NULL;
}
int main() {
pthread_t thread1, thread2;
pthread_mutex_init(&mutex1, NULL);
pthread_mutex_init(&mutex2, NULL);
pthread_create(&thread1, NULL, thread1Function, NULL);
pthread_create(&thread2, NULL, thread2Function, NULL);
pthread_join(thread1, NULL);
pthread_join(thread2, NULL);
pthread_mutex_destroy(&mutex1);
pthread_mutex_destroy(&mutex2);
return 0;
}
在这个示例中,thread1 先获取 mutex1 然后尝试获取 mutex2,而 thread2 先获取 mutex2 然后尝试获取 mutex1,可能会导致两个线程相互等待对方释放锁,从而造成死锁。
【拓展】上文中
sleep(1)的作用:在上述代码中,两个线程函数中设置
sleep(1)的主要目的是增加死锁发生的可能性。当线程获取一个互斥锁后,通过sleep(1)让线程暂停一段时间,使得另一个线程有机会去获取另一个互斥锁,从而更有可能形成两个线程相互等待对方持有的锁的情况,导致死锁的发生。如果没有这个
sleep(1),由于线程执行速度非常快,可能在一个线程完成对两个锁的获取和操作之前,另一个线程还没有机会执行获取锁的操作,这样死锁就不太容易出现,不利于演示和观察死锁的情况。通过添加
sleep(1),模拟了线程操作中的一定延迟,使得线程之间的竞争和等待更加明显,更有可能展示出死锁的现象。
编译并执行可执行程序如下:
[root@localhost multi_pthread_file]# ./dead_lock
Thread 1 acquired mutex1
Thread 2 acquired mutex2
执行可执行程序 dead_lock ,发现该进程在输出两条信息后卡住不动,无法继续执行,出现停滞或长时间无响应的情况,由此推断该进程死锁了。
使用 gdb 命令附加到可能发生死锁的进程。可以通过 ps 命令找到进程 ID(PID),然后使用 gdb 加上进程 ID 来附加到该进程。例如:
[root@localhost multi_pthread_file]# gdb -p 251640 -q
Attaching to process 251640
[New LWP 251641]
[New LWP 251642]
[Thread debugging using libthread_db enabled]
Using host libthread_db library "/lib64/libthread_db.so.1".
0x00007fb09e6906cd in __pthread_timedjoin_ex () from /lib64/libpthread.so.0
Missing separate debuginfos, use: yum debuginfo-install glibc-2.28-251.el8.x86_64
(gdb) info threads
Id Target Id Frame
* 1 Thread 0x7fb09eac8740 (LWP 251640) "dead_lock" 0x00007fb09e6906cd in __pthread_timedjoin_ex () from /lib64/libpthread.so.0
2 Thread 0x7fb09e2b0700 (LWP 251641) "dead_lock" 0x00007fb09e69885d in __lll_lock_wait () from /lib64/libpthread.so.0
3 Thread 0x7fb09daaf700 (LWP 251642) "dead_lock" 0x00007fb09e69885d in __lll_lock_wait () from /lib64/libpthread.so.0
(gdb)
使用 info threads 命令列出进程中的所有线程。这将显示每个线程的 ID 和当前状态。死锁的线程通常会显示为在等待锁(例如,在 __lll_lock_wait)。根据上述结果可知,该进程已死锁。
以下是一个使用 C 语言实现互斥锁、死锁检测和恢复的简单示例代码:
#include
#include
#include
#include
#include
pthread_mutex_t lock1 = PTHREAD_MUTEX_INITIALIZER;
pthread_mutex_t lock2 = PTHREAD_MUTEX_INITIALIZER;
int lock1_held = 0;
int lock2_held = 0;
void *thread1(void *arg) {
pthread_mutex_lock(&lock1);
printf("Thread 1 acquired lock 1\n");
lock1_held = 1;
sleep(1); // 模拟耗时操作
while (lock2_held && lock1_held) { // 持续检测死锁条件
printf("Thread 1 detects potential deadlock and releases lock 1\n");
pthread_mutex_unlock(&lock1);
lock1_held = 0;
sleep(1); // 等待一段时间后再次尝试
pthread_mutex_lock(&lock1);
lock1_held = 1;
}
pthread_mutex_lock(&lock2);
printf("Thread 1 acquired lock 2\n");
pthread_mutex_unlock(&lock2);
pthread_mutex_unlock(&lock1);
lock1_held = 0;
lock2_held = 0;
return NULL;
}
void *thread2(void *arg) {
pthread_mutex_lock(&lock2);
printf("Thread 2 acquired lock 2\n");
lock2_held = 1;
sleep(1); // 模拟耗时操作
while (lock1_held && lock2_held) { // 持续检测死锁条件
printf("Thread 2 detects potential deadlock and releases lock 2\n");
pthread_mutex_unlock(&lock2);
lock2_held = 0;
sleep(1); // 等待一段时间后再次尝试
pthread_mutex_lock(&lock2);
lock2_held = 1;
}
pthread_mutex_lock(&lock1);
printf("Thread 2 acquired lock 1\n");
pthread_mutex_unlock(&lock1);
pthread_mutex_unlock(&lock2);
lock1_held = 0;
lock2_held = 0;
return NULL;
}
int main() {
pthread_t t1, t2;
pthread_create(&t1, NULL, thread1, NULL);
pthread_create(&t2, NULL, thread2, NULL);
sleep(5); // 等待一段时间,让死锁有机会发生
pthread_join(t1, NULL);
pthread_join(t2, NULL);
return 0;
}
在上述示例中,我们进行了如下操作:
定义了两个互斥锁 lock1 和 lock2,以及两个标志 lock1_held 和 lock2_held 来跟踪锁的持有状态。
thread1 函数:
lock1 并设置相应的标志。while 循环,持续检测是否同时持有 lock1 和 lock2 导致死锁。lock1,将标志重置,等待一段时间后重新获取 lock1 并再次设置标志。lock2,完成操作后释放两个锁并重置标志。thread2 函数:
thread1 函数类似,首先获取 lock2 并设置标志。while 循环中检测死锁情况并进行相应处理。lock1,完成操作后释放锁和重置标志。main 函数:
thread1 和 thread2 函数。[root@localhost multi_pthread_file]# ./dead_lock_detect
Thread 1 acquired lock 1
Thread 2 acquired lock 2
Thread 1 detects potential deadlock and releases lock 1
Thread 2 detects potential deadlock and releases lock 2
Thread 1 acquired lock 2
Thread 2 acquired lock 1
通过这种方式,每个线程在获取第二个锁之前,持续检测死锁情况,并在可能死锁时采取释放已持有的锁、等待后重新尝试获取的策略,以尽量避免死锁的发生。但需要注意的是,这仍然不是一种完全可靠的死锁避免机制,在复杂的多线程环境中,可能需要更完善的同步和协调策略。
以下是一个使用 C 语言实现互斥锁通过固定加锁顺序来避免死锁的发生简单示例代码:
#include
#include
#include
// 互斥锁
pthread_mutex_t mutex1;
pthread_mutex_t mutex2;
// 死锁检测标志
int deadlockDetected = 0;
void *thread1Function(void *arg) {
pthread_mutex_lock(&mutex1);
printf("Thread 1 acquired mutex1\n");
sleep(1);
pthread_mutex_lock(&mutex2);
printf("Thread 1 acquired mutex2\n");
pthread_mutex_unlock(&mutex2);
pthread_mutex_unlock(&mutex1);
return NULL;
}
void *thread2Function(void *arg) {
pthread_mutex_lock(&mutex1);
printf("Thread 2 acquired mutex1\n");
sleep(1);
pthread_mutex_lock(&mutex2);
printf("Thread 2 acquired mutex2\n");
pthread_mutex_unlock(&mutex2);
pthread_mutex_unlock(&mutex1);
return NULL;
}
// 模拟死锁检测
void detectDeadlock() {
sleep(3);
// 由于固定了加锁顺序,这里不会发生死锁,无需检测
}
int main() {
pthread_t thread1, thread2;
pthread_mutex_init(&mutex1, NULL);
pthread_mutex_init(&mutex2, NULL);
pthread_create(&thread1, NULL, thread1Function, NULL);
pthread_create(&thread2, NULL, thread2Function, NULL);
detectDeadlock();
pthread_join(thread1, NULL);
pthread_join(thread2, NULL);
pthread_mutex_destroy(&mutex1);
pthread_mutex_destroy(&mutex2);
return 0;
}
在上述示例中,我们进行了如下操作:
mutex1 和 mutex2,以及一个标志 deadlockDetected 用于死锁检测(但在当前代码中未实际使用)。thread1Function 和 thread2Function 分别是两个线程的执行函数。thread1Function 先获取 mutex1,等待 1 秒后再获取 mutex2,最后释放两个锁。thread2Function 逻辑相同,也是先获取 mutex1,等待 1 秒后获取 mutex2,最后释放。detectDeadlock 函数用于模拟死锁检测,但由于当前固定了加锁顺序,实际上不会发生死锁,所以此函数内未进行真正的检测操作。main 函数中:thread1Function 和 thread2Function 。detectDeadlock 函数进行死锁检测(但如前所述,此处在当前代码中未实际生效)。pthread_join 等待两个线程结束。程序运行结果如下:
[root@localhost multi_pthread_file]# ./dead_lock_detect_fixed_mutex
Thread 1 acquired mutex1
Thread 1 acquired mutex2
Thread 2 acquired mutex1
Thread 2 acquired mutex2
通过程序运行结果可知,多个线程使用固定的加锁顺序,不会产生死锁。
以下是一个使用 C 语言实现互斥锁通过 pthread_mutex_trylock() 来避免死锁的发生简单示例代码:
#include
#include
#include
pthread_mutex_t lock1, lock2;
void *thread1(void *arg) {
while (1) {
// 循环尝试获取锁 1
if (pthread_mutex_trylock(&lock1) == 0) {
printf("Thread 1: Acquired lock 1\n");
break;
}
printf("Thread 1: Failed to acquire lock 1, retrying...\n");
sleep(1); // 等待一段时间再重试
}
// 模拟一些操作
sleep(1);
while (1) {
// 循环尝试获取锁 2
if (pthread_mutex_trylock(&lock2) == 0) {
printf("Thread 1: Acquired lock 2\n");
break;
}
printf("Thread 1: Failed to acquire lock 2, retrying...\n");
pthread_mutex_unlock(&lock1); // 释放锁 1
sleep(1); // 等待一段时间再重试
}
// 释放锁 2 和锁 1
pthread_mutex_unlock(&lock2);
pthread_mutex_unlock(&lock1);
return NULL;
}
void *thread2(void *arg) {
while (1) {
// 循环尝试获取锁 2
if (pthread_mutex_trylock(&lock2) == 0) {
printf("Thread 2: Acquired lock 2\n");
break;
}
printf("Thread 2: Failed to acquire lock 2, retrying...\n");
sleep(1); // 等待一段时间再重试
}
// 模拟一些操作
sleep(1);
while (1) {
// 循环尝试获取锁 1
if (pthread_mutex_trylock(&lock1) == 0) {
printf("Thread 2: Acquired lock 1\n");
break;
}
printf("Thread 2: Failed to acquire lock 1, retrying...\n");
pthread_mutex_unlock(&lock2); // 释放锁 2
sleep(1); // 等待一段时间再重试
}
// 释放锁 1 和锁 2
pthread_mutex_unlock(&lock1);
pthread_mutex_unlock(&lock2);
return NULL;
}
int main() {
pthread_t t1, t2;
// 初始化锁
pthread_mutex_init(&lock1, NULL);
pthread_mutex_init(&lock2, NULL);
// 创建线程
pthread_create(&t1, NULL, thread1, NULL);
pthread_create(&t2, NULL, thread2, NULL);
// 等待线程结束
pthread_join(t1, NULL);
pthread_join(t2, NULL);
// 销毁锁
pthread_mutex_destroy(&lock1);
pthread_mutex_destroy(&lock2);
return 0;
}
在上述示例中,我们进行了如下操作:
首先,在程序中定义了两个互斥锁 lock1 和 lock2,用于控制线程对资源的访问。
thread1 函数:
while 循环来不断尝试获取 lock1 锁。lock1 之后,经过 1 秒钟的模拟操作,再次进入另一个 while 循环,尝试获取 lock2 。lock2 失败,会输出失败信息,同时释放之前已获取到的 lock1 ,接着等待 1 秒钟,再次进行获取尝试。lock2 后,按顺序释放 lock2 和 lock1 ,完成线程的操作。thread2 函数:
thread1 相似。首先通过无限的 while 循环尝试获取 lock2 。lock2 并经过 1 秒模拟操作后,进入新的循环尝试获取 lock1 。lock1 失败,同样输出失败提示,释放 lock2 ,等待 1 秒后重试。lock1 和 lock2 。main 函数:
t1 和 t2 。thread1 和 thread2 函数。pthread_join 函数等待这两个线程完成执行。这种通过循环尝试获取锁的方式,能够一定程度上应对获取锁失败的情况,避免线程因单次获取失败而直接终止或出现错误,增强了程序的稳定性和适应性。但需要注意,这种频繁的重试可能会带来一定的系统开销,所以在实际运用中,要根据具体场景合理设定等待时间和重试策略,以达到性能和可靠性的平衡。
程序运行结果如下:
[root@localhost multi_pthread_file]# ./dead_lock_avoid
Thread 1: Acquired lock 1
Thread 2: Acquired lock 2
Thread 1: Failed to acquire lock 2, retrying...
Thread 2: Failed to acquire lock 1, retrying...
Thread 1: Acquired lock 2
Thread 2: Acquired lock 1
通过程序运行结果可知,多个线程使用 pthread_mutex_trylock 加锁,可以避免死锁。
互斥锁(Mutex,Mutual Exclusion Lock)是一种用于多线程环境中的同步机制,具有以下关键特点和用途:
在使用互斥锁时,需要注意正确的加锁和解锁顺序,避免死锁等问题。同时,过度使用互斥锁可能导致性能下降,因为线程可能会因等待锁而阻塞。因此,在设计多线程程序时,需要仔细考虑互斥锁的使用位置和时机,以达到最佳的性能和正确性平衡。
