

关于ARM的一些基本概念,大家可以参考我之前的文章:
《到底什么是Cortex、ARMv8、arm架构、ARM指令集、soc?一文帮你梳理基础概念【科普】》
关于ARM指令用到的IDE开发环境可以参考下面这篇文章
《1. 从0开始学ARM-安装Keil MDK uVision集成开发环境》
《2. 从0开始学ARM-CPU原理,基于ARM的SOC讲解》
有了计算机硬件架构的原理,下面我就可以学习ARM模式、寄存器、流水线等基础知识。
ARM的成功,一方面得益于它独特的公司运作模式,另一方面,当然来自于ARM处理器自身的优良性能。作为一种先进的RISC处理器,ARM处理器有如下特点。
ARM采用的是32位架构,ARM的基本数据类型有以下3种。
注意:
ARM系统结构v4以上版本支持以上3种数据类型,v4以前版本仅支持字节和字。
当将这些数据类型中的任意一种声明成unsigned类型时,n位数据值表示范围为0~2^n^-1的非负数,通常使用二进制格式。
当将这些数据类型的任意一种声明成signed类型时,n位数据值表示范围为-2^n-1^~2^n-1^-1的整数,使用二进制的补码格式。
所有数据类型指令的操作数都是字类型的,如“ADD r1,r0,#0x1”中的操作数“0x1”就是以字类型数据处理的。
Load/Store 数据传输指令可以从存储器存取传输数据,这些数据可以是字节、半字、字。加载时自动进行字节或半字的零扩展或符号扩展。对应的指令分别为LDR/BSTRB(字节操作)、LDRH/STRH(半字操作)、LDR/STR(字操作)。
ARM指令编译后是4个字节(与字边界对齐);Thumb指令编译后是2个字节(与半字边界对齐)。
Cortex系列之前的ARM处理器工作模式一共有7种。
Cortex系列的ARM处理器工作模式有8种,多了1个monitor模式,如下图所示:
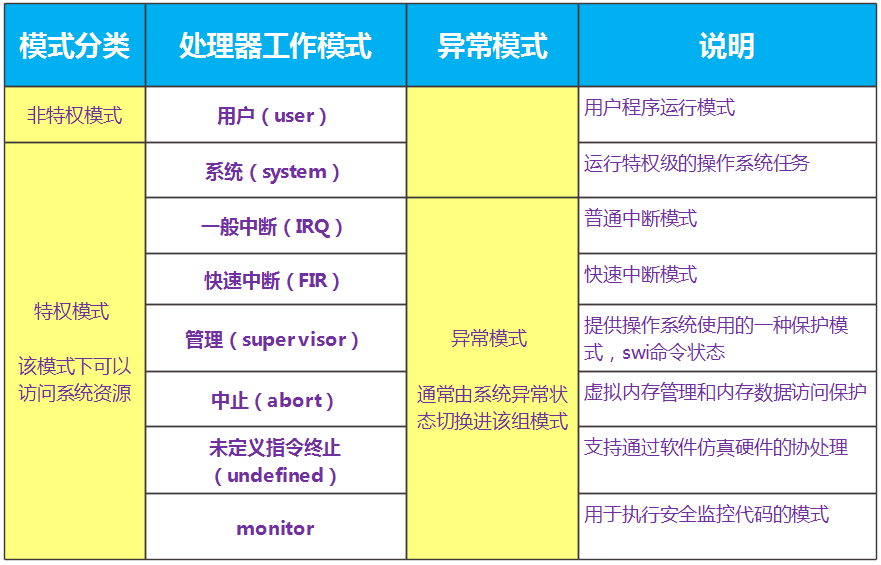
ARM之所以设计出这么多种模式出来,就是为了「应对CPU在运行时各种突发事件」,比如要支持正常的应用程序的运行,在运行任何一个时间点又可能发生很多异常事件,比如:关机、收到网卡信息、除数为0、访问非法内存、解析到了非法指令等等,不光要能处理这些异常还要能够从异常中再返回到原来的程序继续执行。
除用户模式以外,其余的所有6种模式称之为非用户模式,或特权模式(Privileged Modes);其中除去用户模式和系统模式以外的5种又称为异常模式(ExceptionModes),常用于处理中断或异常,以及需要访问受保护的系统资源等情况。
ARM微处理器的运行模式可以通过软件改变,也可以通过外部中断或异常处理改变。应用程序运行在用户模式下,当处理器运行在用户模式下时,某些被保护的系统资源是不能被访问的。
指由处理器执行指令导致原来运行程序的中止,异常与指令运行相关,是CPU执行程序产生的,是同步的,可分为精确异常和非精确异常。异常处理遵守严格的程序顺序,不能嵌套,只有当第一个异常处理完并返回后才能处理后续的异常。
要进入异常模式,一定要有异常源,ARM规定有7种异常源:
| 异常源 | 描述 |
|---|---|
| Reset | 上电时执行 |
| Undef | 当流水线中的某个非法指令到达执行状态时执行 |
| SWI | 当一个软中断指令被执行完的时候执行 |
| Prefetch | 当一个指令被从内存中预取时,由于某种原因而失败,如果它能到达执行状态这个异常才会产生 |
| Data | 如果一个预取指令试图存取一个非法的内存单元,这时异常产生 |
| IRQ | 通常的中断 |
| FIQ | 快速中断 |
异常发生之后,CPU必须要立刻做出响应,关于异常后面会详细讲解。
Cortex A系列ARM处理器共有40个32位寄存器,其中33个为通用寄存器,7个为状态寄存器。usr模式和sys模式共用同一组寄存器。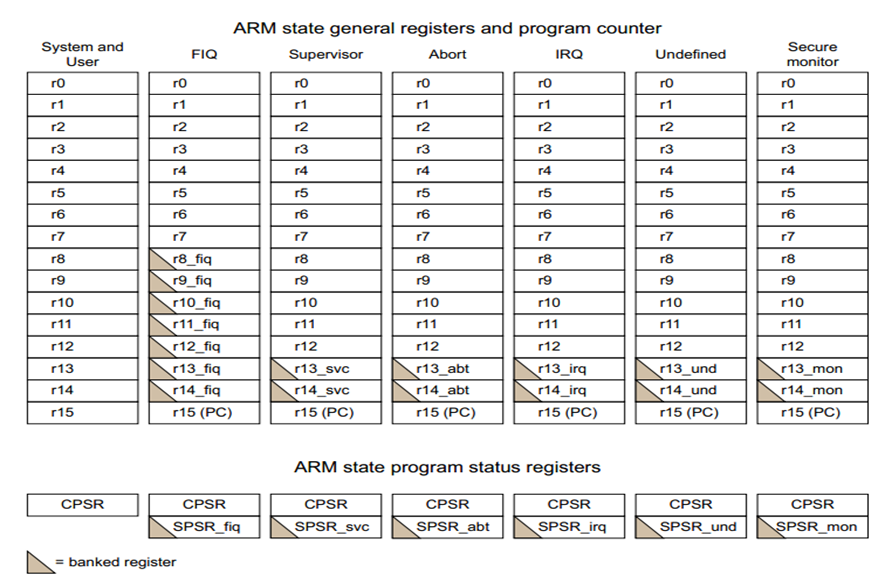
通用寄存器包括R0~R15,可以分为3类:
在所有运行模式下,未分组寄存器都指向同一个物理寄存器,它们未被系统用作特殊的用途.因此在中断或异常处理进行运行模式转换时,由于不同的处理器运行模式均使用相同的物理寄存器,所以可能造成寄存器中数据的破坏。
对于分组寄存器,它们每一次所访问的物理寄存器都与当前处理器的运行模式有关。
对于R8~R12来说,每个寄存器对应2个不同的物理寄存器,当使用FIQ(快速中断模式)时,访问寄存器 R8_fiq~R12_fiq;当使用除FIQ模式以外的其他模式时,访问寄存器R8_usr~R12_usr。
对于R13,R14来说,每个寄存器对应7个不同的物理寄存器,其中一个是用户模式与系统模式共用,另外6个物理寄存器对应其他6种不同的运行模式,并采用以下记号来区分不同的物理寄存器:
R13_mode R14_mode
其中mode可为:「usr,fiq,irq,svc,abt,und,mon」。
在ARM指令中常用作「堆栈指针」,用户也可使用其他的寄存器作为堆栈指针,而在Thumb指令集中,某些指令强制性的要求使用R13作为堆栈指针。
寄存器R13在ARM指令中常用作堆栈指针,但这只是一种习惯用法,用户也可使用其他的寄存器作为堆栈指针。而在Thumb指令集中,某些指令强制性的要求使用R13作为堆栈指针。
由于处理器的每种运行模式均有自己独立的物理寄存器R13,在用户应用程序的初始化部分,一般都要初始化每种模式下的R13,使其指向该运行模式的栈空间。这样,当程序的运行进入异常模式时,可以将需要保护的寄存器放入R13所指向的堆栈,而当程序从异常模式返回时,则从对应的堆栈中恢复,采用这种方式可以保证异常发生后程序的正常执行。
当执行子程序调用指令(BL)时,R14可得到R15(程序计数器PC)的备份。
在每一种运行模式下,都可用R14保存子程序的返回地址,当用BL或BLX指令调用子程序时,将PC的当前值复制给R14,执行完子程序后,又将R14的值复制回PC,即可完成子程序的调用返回。以上的描述可用指令完成。
「方法1:」
MOV PC, LR
或者
BX LR
「方法2:」在子程序入口处使用以下指令将R14存入堆栈:
STMFD SP!,{,LR}
对应的,使用以下指令可以完成子程序返回:
LDMFD SP!,{,PC}
寄存器R15用作程序计数器(PC),在ARM状态下,位[1:0]为0,位[31:2]用于保存PC,在Thumb状态下,位[0]为0,位[31:1]用于保存PC。
比如如果pc的值是0x40008001,那么在寻址的时候其实会查找地址0x40008000,低2位会自动忽略掉。「个中原因,请读者自己思考?」
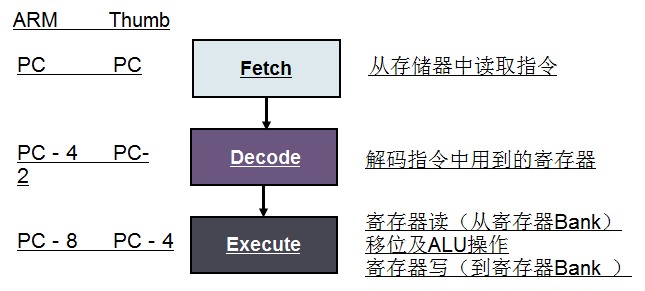
由于ARM体系结构采用了多级流水线技术,对于ARM指令集而言,PC总是指向当前指令的下两条指令的地址,即PC的值为当前指令的地址值加8个字节。
即:PC值=当前程序执行位置+8
【流水线技术参考第七章】
「CPSR」(Current Program Status Register,当前程序状态寄存器),CPSR可在任何运行模式下被访问,它包括条件标志位、中断禁止位、当前处理器模式标志位,以及其他一些相关的控制和状态位。
每一种运行模式下又都有一个专用的物理状态寄存器,称为「SPSR」(Saved Program Status Register,备份的程序状态寄存器),当异常发生时,SPSR用于保存CPSR的当前值,从异常退出时则可由SPSR来恢复CPSR。
由于用户模式和系统模式不属于异常模式,它们没有SPSR,当在这两种模式下访问SPSR,结果是未知的。
寄存器CPSR格式如下:
「N (Number)」: 当用两个补码表示的带符号数进行运算时,N=1表示运行结果为负,N=0表示运行结果为正或零
「Z :(Zero)」: Z=1表示运算结果为零,Z=0表示运行结果非零
「C」 : 可以有4种方法设置C的值:
「V」 :
(oVerflow)对于加/减法运算指令,当操作数和运算结果为二进制的补码表示的带符号位溢出时,V=1表示符号位溢出;对于其他的非加/减运算指令V的值通常不改变
「Q」:在ARM V5及以上版本的E系列处理器中,用Q标志位指示增强的DSP运算指令是否发生了溢出。在其它版本的处理器中,Q标志位无定义
「J:」
仅ARM v5TE-J架构支持 , T=0;J = 1 处理器处于Jazelle状态,也可以和其他位组合.
「E位:」大小端控制位
「A位:」A=1 禁止不精确的数据异常
「T :」T = 0;J=0; 处理器处于 ARM 状态 T = 1;J=0 处理器处于 Thumb 状态 T = 1;J=1 处理器处于 ThumbEE 状态
「中断禁止位I,F」【重要】 I=1 禁止IRQ中断 F=1 禁止FIQ中断
比如我们要想在程序中实现禁止中断,那么就需要将CPSR[7]置1。
| bite | 模式 | ARM模式可访问的寄存器 |
|---|---|---|
| 0b10000 | 用户模式user | PC,CPSR,R0~R14 |
| 0b10001 | FIQ模式 | PC,CPSR,SPSR_fiq,R14_fiq~R8_fiq,R0~R7 |
| 0b10010 | IRQ模式 | PC,CPSR,SPSR_irq,R14_irq~R13_irq,R0~R12 |
| 0b10011 | 管理模式 | PC,CPSR,SPSR_svc,R14_svc~R13_svc,R0~R12 |
| 0b10111 | 中止模式Abort | PC,CPSR,SPSR_abt,R14_abt~R13_abt,R0~R12 |
| 0b11011 | 未定义模式 | C,CPSR,SPSR_und,R14_und~R13_und,R0~R12 |
| 0b11111 | 系统模式 | PC,CPSR,R0~R14 |
注意观察这5个bit的特点,最高位都是1,低4位的值则各不相同,这个很重要,要想搞清楚uboot、linux的源码,尤其是异常操作的代码,必须要知道这几个bit的值。
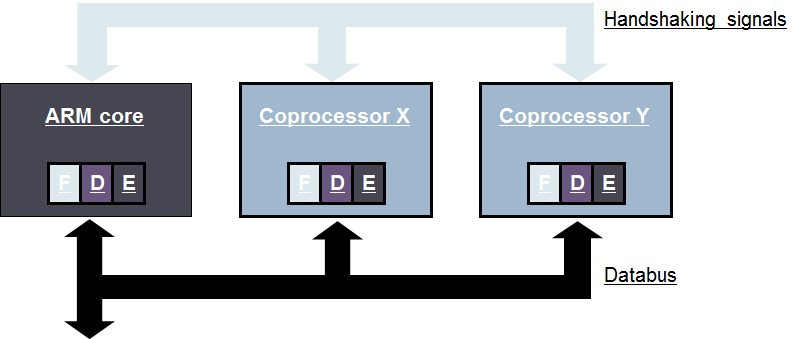 ARM体系结构允许通过增加协处理器来扩展指令集。最常用的协处理器是用于控制片上功能的系统协处理器。
ARM体系结构允许通过增加协处理器来扩展指令集。最常用的协处理器是用于控制片上功能的系统协处理器。
例如,控制Cache和存储管理单元MMU的CP15协处理器、设置异常向量表地址的mcr指令。
ARM支持16个协处理器,在程序执行过程中,每个协处理器忽略属于ARM处理器和其他协处理器指令,当一个协处理器硬件不能执行属于她的协处理器指令时,就会产生一个未定义的异常中断,在异常中断处理程序中,可以通过软件模拟该硬件的操作,比如,如果系统不包含向量浮点运算器,则可以选择浮点运算软件模拟包来支持向量浮点运算。
ARM协处理器指令包括如下三类:
这些指令包括如下5条:
关于协处理器指令,我们只需要知道几个常用的即可,后面文章会提到。
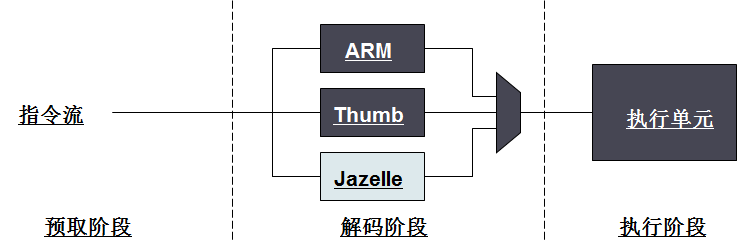 Jazelle杰则来 或者说Java字节码状态是为了运行Java虚拟机而添加的一种状态。
Jazelle杰则来 或者说Java字节码状态是为了运行Java虚拟机而添加的一种状态。
ARM的Jazelle技术在硬件上提供了对Java字节码的支持,大大提高了系统的性能。
由于ARM 架构是32-bits,16-bits = “halfword” , “word” = 32-bits。
Java 字节码 8-bits 独立架构的指令集。Jazelle 用硬件执行大多数的字节码(另一些使用高度优化了的ARM 代码)。这是由于折衷了硬件复杂度(功耗 & 硅片面积)和速度。
流水线技术通过多个功能部件并行工作来缩短程序执行时间,提高处理器核的效率和吞吐率,从而成为微处理器设计中最为重要的技术之一。
到ARM7为止的ARM处理器使用简单的3级流水线,它包括下列流水线级。(1)取指令 从寄存器装载一条指令。(2)译码(decode) 识别被执行的指令,并为下一个周期准备数据通路的控制信号。在这一级,指令占有译码逻辑,不占用数据通路。(3)执行 处理指令并将结果写回寄存器。
 当处理器执行简单的数据处理指令时,流水线使得平均每个时钟周期能完成1条指令。但一条指令需要3个时钟周期来完成,因此有3个时钟周期的延时,但吞吐率是每个周期一条指令。
当处理器执行简单的数据处理指令时,流水线使得平均每个时钟周期能完成1条指令。但一条指令需要3个时钟周期来完成,因此有3个时钟周期的延时,但吞吐率是每个周期一条指令。
对于3级流水线,PC寄存器里的值并不是正在执行的指令的地址,而是预取指令的地址,这个知识点很重要,后面我们会详细的举例来证明。
处理器要满足高性能的要求,为了满足这个要求,需要重新考虑处理器的组织结构。提高性能的方法主要有两种方法:
较高性能的ARM核使用了5级流水线,而且具有分开的指令和数据存储器。在Cortex-A8中有一条13级的流水线,但是ARM公司没有对其中的技术公开任何相关的细节。
从经典ARM系列到现在Cortex系列,ARM处理器的结构在向复杂的阶段发展,但没改变的是CPU的取址指令和地址关系,「不管是几级流水线,都可以按照最初的3级流水线的操作特性来判断其当前的PC位置」。
为方便理解,下面我们以3级流水线为例,
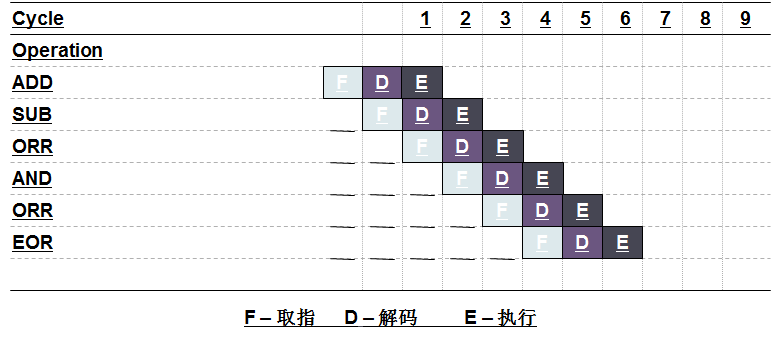
这是一个理想的实例,所有的指令都在寄存器中执行,且处理器完全不必离开芯片本身。每个周期,都有一条指令被执行,流水线的容量得到了充分的发挥。指令周期数 (CPI) = 1
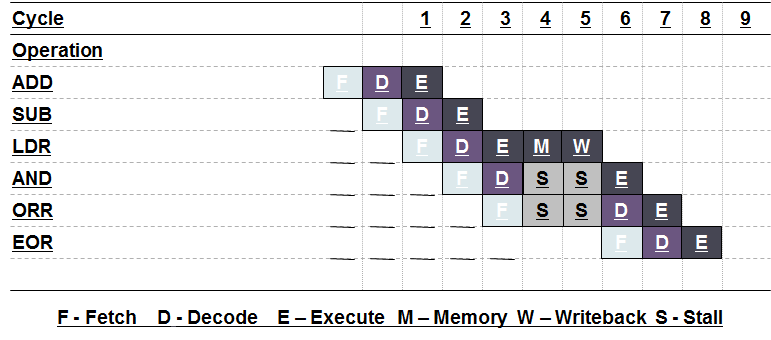
该例中,用6周期执行了4条指令 指令周期数 (CPI) = 1.5
与最佳流水线不同,装载(LDR) 操作将数据移进片内导致了指令/数据总线被占用,因此随后紧跟了内部的写周期( writeback)以完成将数据写回寄存器。
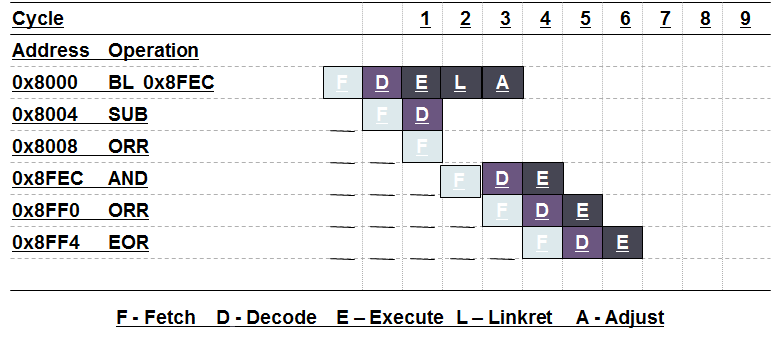
BL指令用于实现指令流的跳转,并存储返回地址到寄存器R14(LR)中。
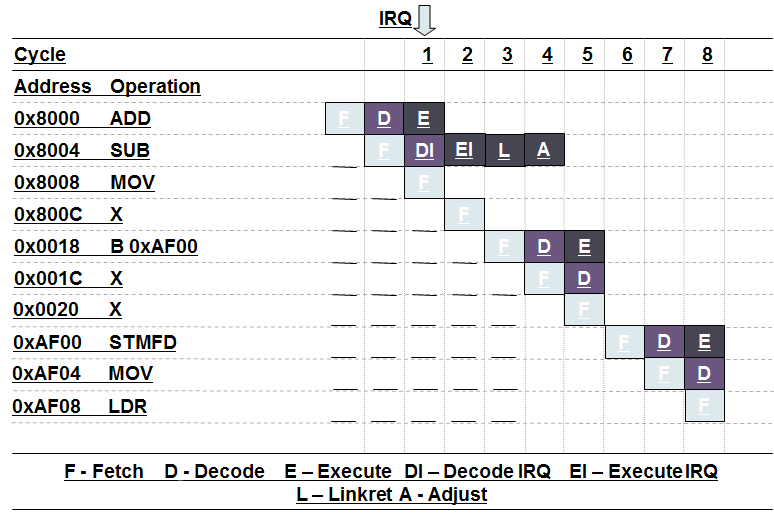
「IRQ 中断的反应时间最小=7周期」
周期1: 内核被告知有中断 IRQ在现行指令执行完之前不会被响应( MUL and LDM/STM 指令会有长的延迟) 解码阶段:中断被解码(中断已使能,设置了相应标志位… )。如果中断被使能和服务,正常的指令将不会被解码。
周期 2: 此时总是进入ARM状态. 执行中断 ( 获取IR向量的地址), 保存 CPSR 于 SPSR, 改变CPSR模式为 IRQ 模式并禁止进一步的 IRQ 中断输入。
周期 3: 保存 PC (0x800C) 于 r14_irq, 从IRQ异常处理向量处取指
周期 4: 解码向量表中的指令; 调整r14irq 为0x8008
周期 4和 5: 无有用的指令取指, 由于周期 6的跳转
周期 6: 取异常处理子程序的第一条指令; 从子程序返回: SUBS pc,lr,#4
这将恢复工作模式并从响应中断前的下一条指令处取指,如果有多个中断,需堆栈保存返回地址。注意最大的FIQ响应延迟为 29个周期(而非Thumb状态的28周期!)。

从0学ARM专辑汇总

1. 0. 到底什么是Cortex、ARMv8、arm架构、ARM指令集、soc?一文帮你梳理基础概念【科普】
2. 1. 从0开始学ARM-安装Keil MDK uVision集成开发环境
3. 2. 从0开始学ARM-CPU原理,基于ARM的SOC讲解
推荐阅读
进群,请加一口君微信,带你嵌入式入门进阶。

点击“阅读原文”查看更多分享,欢迎点分享、收藏、点赞、在看。
