动动手指,关注公众号并加星标哦
(1) 脉冲雷达使用的是什么信号?信号是什么样的?
脉冲雷达,顾名思义,就是使用一系列的脉冲信号。
脉冲信号可以用PRF(pulse repetition frequency),PRI(pulse repetition interval),τ(pulse width)和T(IPP ,inter-pulse period)来表征,如下图所示。
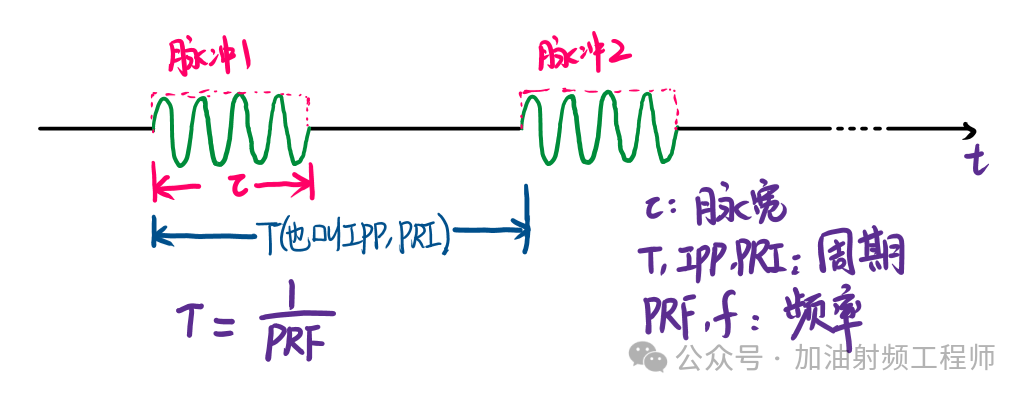
每个周期内,雷达在脉宽τ内发射信号,然后其余的时间主要就是等候回波。
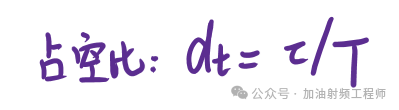
雷达的占空比定义为:
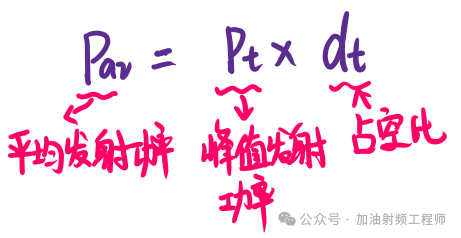
雷达平均发射功率和峰值发射功率的关系如下图所示:
如果以PRF(pulse repetition frequency)来对脉冲雷达进行分类的话,大概可以分为:
low PRF: 低PRF意味着高PRI,也就是周期很长,比较适用于长距离,对目标速度不感兴趣的场景
medium PRF
high PRF:主要是用来短距离的距离测量和速度测量。
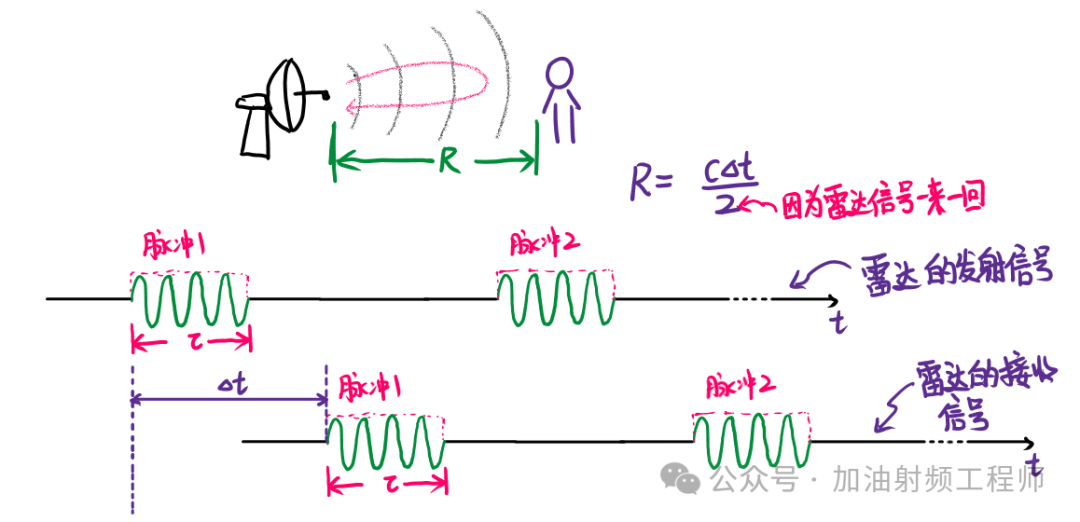
(2) 脉冲雷达是怎么来测距的?
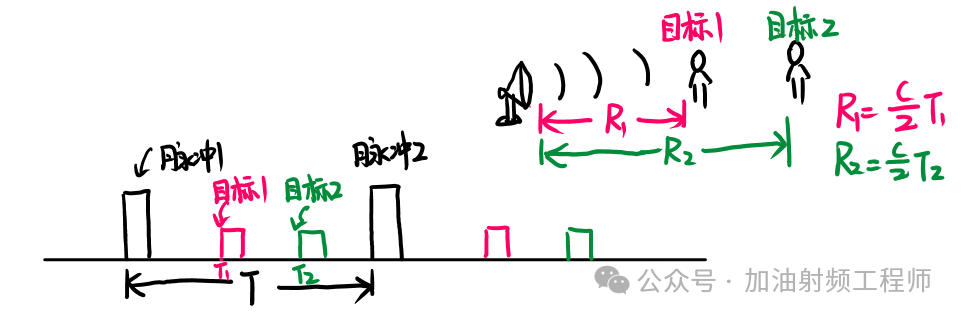
假设有一个雷达系统,它与目标之间的关系如下图所示,那么根据发射脉冲和接收脉冲之间的时延,可以计算出目标距离雷达的距离。
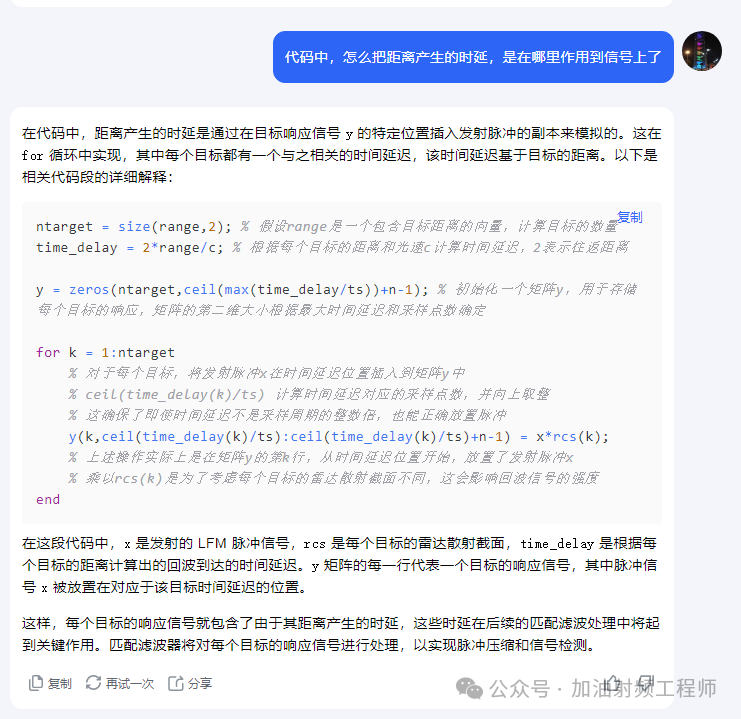
文献[1]有提供配套的matlab程序,比如说,距离的计算,有兴趣的可以去看一看。不懂程序的硬件工程师也不用害怕,有AI的加持,读懂程序,虽说不能秒级吧,但是花费时间也不长的(完整程序见文末!想要文献+配套程序的,可加我微信,微信在文末的课程海报上)
比如说,我看程序的时候,有个疑问,我隐隐约约能把疑问表达出来,但是没能表达的很明白,不过KIMI听懂了,因为他给的答案是我想要的答案。
(3) 脉冲雷达是多大距离都能测么?
但是脉冲雷达也不是所有的距离都能测,它有它的局限。
如下图所示,如果距离合适,脉冲1发射出去的信号,其由于目标1和目标2产生的回波的时间,位于脉冲1和脉冲2之间,这个时候,能分别计算出目标1和目标2的距离。
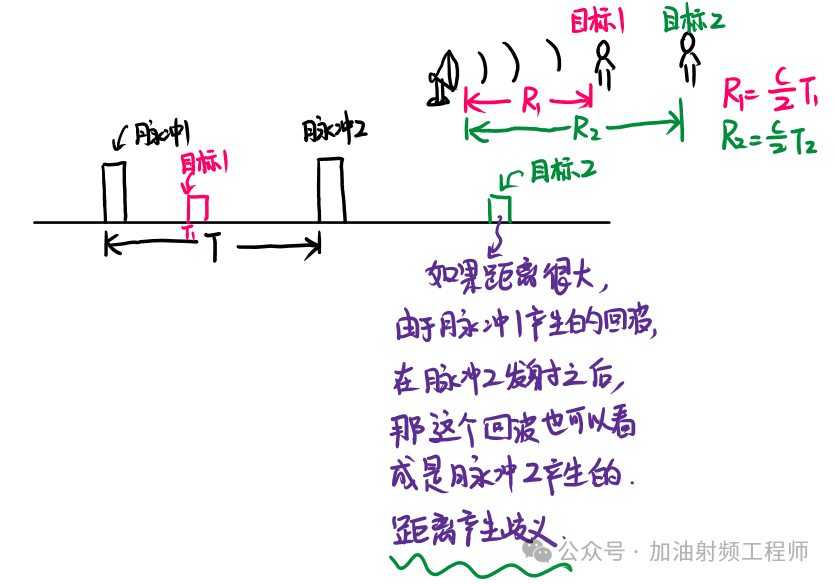
如果距离过大,基于脉冲1的回波信号,在脉冲2发射之后,才被雷达接收到,那距离就会产生歧义。
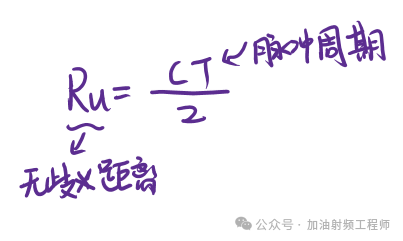
所以,最大的无歧义距离,可以定义为:
(4) 脉冲雷达的测距分辨率是多少?
待看~
(5) 脉冲雷达是怎么来测量速度的?
待看~
(6) 脉冲雷达是多大速度都能测么?
待看~
(7) 脉冲雷达的速度分辨率是多少?
待看~
% This function implements the matched filter processor%% Inputs% tau == uncompressed pulse width in seconds% b == chirp bandwidth in Hz% range == scatterers?relative range in m% rcs == vector of scatterers?RCS in meter squared% Output% y == normalized compressed output%clcclose allclear alltau = 1e-6;b = 50e6;fs =5*b;rcs = 1;range = 150;nnoise = 0.05;n = ceil(tau*fs); %Number of sample points of chirp signalc = 3e8;ts = 1/fs;t = 0:ts:ts*(n-1);% Transmitted LFM Chirp pulse:x = exp(i * pi * (b/tau) .* t.^2);replica = exp(i * pi * (b/tau) .* t.^2);ntarget = size(range,2);time_delay = 2*range/c;y = zeros(ntarget,ceil(max(time_delay/ts))+n-1);for k = 1:ntargety(k,ceil(time_delay(k)/ts):ceil(time_delay(k)/ts)+n-1) = x*rcs(k);endycomp = ones(1,ntarget)*y;ycomp =ycomp +nnoise*randn(1,size(ycomp,2));tsamp = 0:ts:ts*ceil((length(ycomp)-1));nfft =size(ycomp,2)H = (conj(fft(replica,nfft)));h = (b*tau/n)*ifft(H.*fft(ycomp));filter_out = h;tout = 0.0:ts:ts*(length(filter_out)-1);% subplot(2,2,4);% plot(tout*1e6,20*log10( filter_out+0.0004));% title('\bf Output of Matched Filter');% xlabel('\bf Time \mu s');% grid% ylabel ('\bf Pulse compression gain in dB')delr = (tout)*c/2;figuresubplot(2,1,1)filter_out = filter_out./max(filter_out);plot(70*tout*1e6,20*log10( filter_out+0.0004),'linewidth',1.5);title('\bf Output of Matched Filter');xlabel('\bf Time \mu s');gridylabel ('\bf Output vs. time')title({['\bf Targets range 10.5 km', '; delay = 70 \mu sec']})% determine Hamming windowH = conj(fft(replica,nfft));h= (b*tau/n)*ifft((H.*fft(ycomp)));filter_out = h;tout = 0:ts:ts*(length(filter_out)-1);filter_out = filter_out./max(filter_out);subplot(2,1,2)plot((10350+delr)./1000,20*log10( filter_out+0.00004));xlabel('\bf Target range in km');ylabel('\bf Output vs. range')grid
参考文献:
[1] Bassem R. Mahafza, Radar Systems Analysis and Design Using Matlab


完结接收机课程吆喝处哈(已在平台上购买的同学,加我微信,领课件资料哈!)
想了解接收机的底层理论知识,可以选择这门课;
想了解ADS的系统仿真,可以选择这门课;
想了解SystemVue的系统仿真,可以选择这门课。
每个分指标的计算后面,都跟着一个仿真验证。所有指标都分配完了以后,还会有一个整体链路的仿真。
整体链路仿真,还分单音时候的验证+调制信号的验证;ADS仿完,再用SystemVue走一遍。
这些仿真步骤,该采用什么模板,各个参数该怎么设置,该用什么等价标准来判断,都是我花了很长时间探索,才联通起来的。
我觉得大概率是全网独一份,因为这些都是我结合软件自带的help文件和模板,再结合项目,一点一点探索出来的,有很多自己的想法在里面。
想报名的同学,可以海报底部扫码哈!
☜左右滑动查看更多
Slide for more photos