上篇
对TCP/IP、UDP、Socket编程这些词你不会很陌生吧?随着车载以太网的发展,这些词充斥着我们的耳朵。那么我想问:
什么是TCP/IP、UDP?
Socket在哪里呢?
Socket是什么呢?
你会使用它们吗?
1. 什么是TCP/IP、UDP?
TCP/IP(Transmission Control Protocol/Internet Protocol)即传输控制协议/网间协议,是一个工业标准的协议集,它是为广域网(WANs)设计的。
UDP(User Data Protocol,用户数据报协议)是与TCP相对应的协议。它是属于TCP/IP协议族中的一种。
这里有一张图,表明了这些协议的关系。
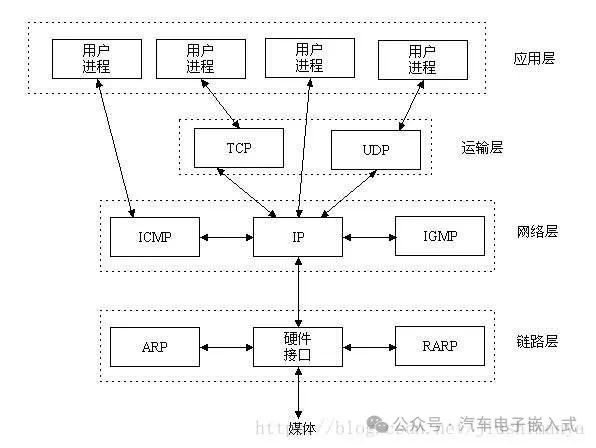
TCP/IP协议族包括运输层、网络层、链路层。现在你知道TCP/IP与UDP的关系了吧。
2. Socket在哪里呢?
在图1中,我们没有看到Socket的影子,那么它到底在哪里呢?还是用图来说话,一目了然。
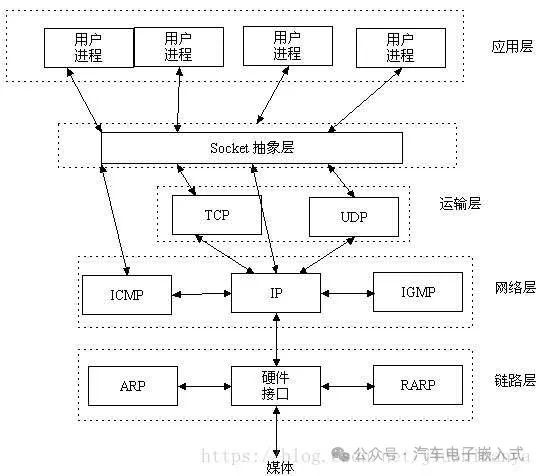
原来Socket在这里。
3. Socket是什么呢?
Socket是应用层与TCP/IP协议族通信的中间软件抽象层,它是一组接口。在设计模式中,Socket其实就是一个门面模式,它把复杂的TCP/IP协议族隐藏在Socket接口后面,对用户来说,一组简单的接口就是全部,让Socket去组织数据,以符合指定的协议。
4.你会使用它们吗?
前人已经给我们做了好多的事了,网络间的通信也就简单了许多,但毕竟还是有挺多工作要做的。以前听到Socket编程,觉得它是比较高深的编程知识,但是只要弄清Socket编程的工作原理,神秘的面纱也就揭开了。
一个生活中的场景。你要打电话给一个朋友,先拨号,朋友听到电话铃声后提起电话,这时你和你的朋友就建立起了连接,就可以讲话了。等交流结束,挂断电话结束此次交谈。生活中的场景就解释了这工作原理,也许TCP/IP协议族就是诞生于生活中,这也不一定。
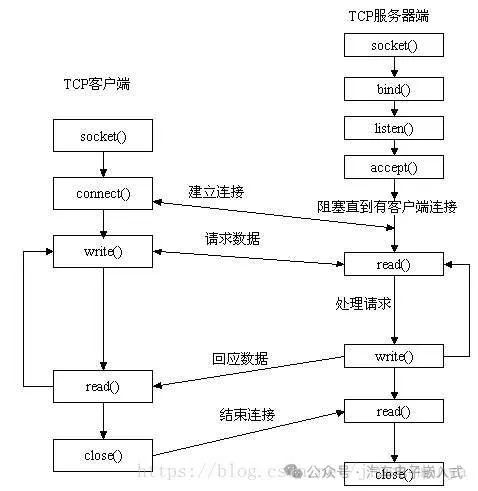
先从服务器端说起。服务器端先初始化Socket,然后与端口绑定(bind),对端口进行监听(listen),调用accept阻塞,等待客户端连接。在这时如果有个客户端初始化一个Socket,然后连接服务器(connect),如果连接成功,这时客户端与服务器端的连接就建立了。客户端发送数据请求,服务器端接收请求并处理请求,然后把回应数据发送给客户端,客户端读取数据,最后关闭连接,一次交互结束。
============================================
下篇
我们深谙信息交流的价值,那网络中进程之间如何通信,如我们每天打开浏览器浏览网页时:
问题1:浏览器的进程怎么与web服务器通信的?
问题2:当你用QQ聊天时,QQ进程怎么与服务器或你好友所在的QQ进程通信?问题3:这些都得靠socket,那什么是 socket?
问题4:socket的类型有哪些?
还有socket的基本函数,这些都是本文想介绍的。
本篇的主要内容如下:
1、网络中进程之间如何通信?
2、Socket是什么?
3、socket的基本操作
3.1、socket()函数
3.2、bind()函数
3.3、listen()、connect()函数
3.4、accept()函数
3.5、read()、write()函数等
3.6、close()函数
4、socket中TCP的三次握手建立连接详解
5、socket中TCP的四次握手释放连接详解
6、一个例子
1、网络中进程之间如何通信?
本地的进程间通信(IPC)有很多种方式,但可以总结为下面4类:
消息传递(管道、FIFO、消息队列)
同步(互斥量、条件变量、读写锁、文件和写记录锁、信号量)
共享内存(匿名的和具名的)
远程过程调用(Solaris门和Sun RPC)
但这些都不是本文的主题!我们要讨论的是网络中进程之间如何通信?首要解决的问题是如何唯一标识一个进程,否则通信无从谈起!在本地可以通过进程PID来唯一标识一个进程,但是在网络中这是行不通的。其实TCP/IP协议族已经帮我们解决了这个问题,网络层的“ip地址”可以唯一标识网络中的主机,而传输层的“协议+端口”可以唯一标识主机中的应用程序(进程)。这样利用三元组(ip地址,协议,端口)就可以标识网络的进程了,网络中的进程通信就可以利用这个标志与其它进程进行交互。
使用TCP/IP协议的应用程序通常采用应用编程接口:UNIX BSD的套接字(socket)和UNIX System V的TLI(已经被淘汰),来实现网络进程之间的通信。就目前而言,几乎所有的应用程序都是采用socket,而现在又是网络时代,网络中进程通信是无处不在,这就是我为什么说“一切皆socket”.
2、什么是Socket?
上面我们已经知道网络中的进程是通过socket来通信的,那什么是socket呢?socket起源于Unix,而Unix/Linux基本哲学之一就是“一切皆文件”,都可以用“打开open –> 读写write/read –> 关闭close”模式来操作。我的理解就是Socket就是该模式的一个实现,socket即是一种特殊的文件,一些socket函数就是对其进行的操作(读/写IO、打开、关闭),这些函数我们在后面进行介绍。
socket一词的起源
在组网领域的首次使用是在1970年2月12日发布的文献IETF RFC33中发现的,撰写者为Stephen Carr、Steve Crocker和Vint Cerf。根据美国计算机历史博物馆的记载,Croker写道:“命名空间的元素都可称为套接字接口。一个套接字接口构成一个连接的一端,而一个连接可完全由一对套接字接口规定。”计算机历史博物馆补充道:“这比BSD的套接字接口定义早了大约12年。”
3、socket的基本操作
既然socket是“open—write/read—close”模式的一种实现,那么socket就提供了这些操作对应的函数接口。下面以TCP为例,介绍几个基本的socket接口函数。
3.1、socket()函数
int socket(int domain, int type, int protocol);
socket函数对应于普通文件的打开操作。普通文件的打开操作返回一个文件描述字,而socket()用于创建一个socket描述符(socket descriptor),它唯一标识一个socket. 这个socket描述字跟文件描述字一样,后续的操作都有用到它,把它作为参数,通过它来进行一些读写操作。
正如可以给fopen的传入不同参数值,以打开不同的文件。创建socket的时候,也可以指定不同的参数创建不同的socket描述符,socket函数的三个参数分别为:
domain:即协议域,又称为协议族(family)。常用的协议族有,AF_INET、AF_INET6、AF_LOCAL(或称AF_UNIX,Unix域socket)、AF_ROUTE等等。协议族决定了socket的地址类型,在通信中必须采用对应的地址,如AF_INET决定了要用ipv4地址(32位的)与端口号(16位的)的组合、AF_UNIX决定了要用一个绝对路径名作为地址。
type:指定socket类型。常用的socket类型有,SOCK_STREAM、SOCK_DGRAM、SOCK_RAW、SOCK_PACKET、SOCK_SEQPACKET等等(socket的类型有哪些?)。
protocol:故名思意,就是指定协议。常用的协议有,IPPROTO_TCP、IPPTOTO_UDP、IPPROTO_SCTP、IPPROTO_TIPC等,它们分别对应TCP传输协议、UDP传输协议、STCP传输协议、TIPC传输协议(这个协议我将会单独开篇讨论!)。
注意:并不是上面的type和protocol可以随意组合的,如SOCK_STREAM不可以跟IPPROTO_UDP组合。当protocol为0时,会自动选择type类型对应的默认协议。
当我们调用socket创建一个socket时,返回的socket描述字它存在于协议族(address family,AF_XXX)空间中,但没有一个具体的地址。如果想要给它赋值一个地址,就必须调用bind()函数,否则就当调用connect()、listen()时系统会自动随机分配一个端口。
3.2、bind()函数
正如上面所说bind()函数把一个地址族中的特定地址赋给socket。例如对应AF_INET、AF_INET6就是把一个ipv4或ipv6地址和端口号组合赋给socket。
int bind(int sockfd, const struct sockaddr *addr, socklen_t addrlen);
函数的三个参数分别为:
sockfd:即socket描述字,它是通过socket()函数创建了,唯一标识一个socket。bind()函数就是将给这个描述字绑定一个名字。
addr:一个const struct sockaddr *指针,指向要绑定给sockfd的协议地址。这个地址结构根据地址创建socket时的地址协议族的不同而不同,如ipv4对应的是:
struct sockaddr_in { sa_family_t sin_family; in_port_t sin_port; struct in_addr sin_addr;};
struct in_addr { uint32_t s_addr;};
ipv6对应的是:
struct sockaddr_in6 { sa_family_t sin6_family; in_port_t sin6_port; uint32_t sin6_flowinfo; struct in6_addr sin6_addr; uint32_t sin6_scope_id;};
struct in6_addr { unsigned char s6_addr[16];};
Unix域对应的是:
#define UNIX_PATH_MAX 108
struct sockaddr_un { sa_family_t sun_family; char sun_path[UNIX_PATH_MAX];};
addrlen:对应的是地址的长度。
通常服务器在启动的时候都会绑定一个众所周知的地址(如ip地址+端口号),用于提供服务,客户就可以通过它来接连服务器;而客户端就不用指定,有系统自动分配一个端口号和自身的ip地址组合。这就是为什么通常服务器端在listen之前会调用bind(),而客户端就不会调用,而是在connect()时由系统随机生成一个。
网络字节序与主机字节序
主机字节序就是我们平常说的大端和小端模式:不同的CPU有不同的字节序类型,这些字节序是指整数在内存中保存的顺序,这个叫做主机序。引用标准的Big-Endian和Little-Endian的定义如下:
a) Little-Endian就是低位字节排放在内存的低地址端,高位字节排放在内存的高地址端。
b) Big-Endian就是高位字节排放在内存的低地址端,低位字节排放在内存的高地址端。
网络字节序:4个字节的32 bit值以下面的次序传输:首先是0~7bit,其次8~15bit,然后16~23bit,最后是24~31bit。这种传输次序称作大端字节序。由于TCP/IP首部中所有的二进制整数在网络中传输时都要求以这种次序,因此它又称作网络字节序。字节序,顾名思义字节的顺序,就是大于一个字节类型的数据在内存中的存放顺序,一个字节的数据没有顺序的问题了。
所以:在将一个地址绑定到socket的时候,请先将主机字节序转换成为网络字节序,而不要假定主机字节序跟网络字节序一样使用的是Big-Endian。由于 这个问题曾引发过血案!公司项目代码中由于存在这个问题,导致了很多莫名其妙的问题,所以请谨记对主机字节序不要做任何假定,务必将其转化为网络字节序再 赋给socket.
3.3、listen()、connect()函数
如果作为一个服务器,在调用socket()、bind()之后就会调用listen()来监听这个socket,如果客户端这时调用connect()发出连接请求,服务器端就会接收到这个请求。
int listen(int sockfd, int backlog);int connect(int sockfd, const struct sockaddr *addr, socklen_t addrlen);
listen函数的第一个参数即为要监听的socket描述字,第二个参数为相应socket可以排队的最大连接个数。socket()函数创建的socket默认是一个主动类型的,listen函数将socket变为被动类型的,等待客户的连接请求。
connect函数的第一个参数即为客户端的socket描述字,第二参数为服务器的socket地址,第三个参数为socket地址的长度。客户端通过调用connect函数来建立与TCP服务器的连接。
3.4、accept()函数
TCP服务器端依次调用socket()、bind()、listen()之后,就会监听指定的socket地址了。TCP客户端依次调用socket()、connect()之后就想TCP服务器发送了一个连接请求。TCP服务器监听到这个请求之后,就会调用accept()函数取接收请求,这样连接就建立好了。之后就可以开始网络I/O操作了,即类同于普通文件的读写I/O操作。
int accept(int sockfd, struct sockaddr *addr, socklen_t *addrlen);
accept函数的第一个参数为服务器的socket描述字,第二个参数为指向struct sockaddr *的指针,用于返回客户端的协议地址,第三个参数为协议地址的长度。如果accpet成功,那么其返回值是由内核自动生成的一个全新的描述字,代表与返回客户的TCP连接。
注意:accept的第一个参数为服务器的socket描述字,是服务器开始调用socket()函数生成的,称为监听socket描述字;而accept函数返回的是已连接的socket描述字。一个服务器通常通常仅仅只创建一个监听socket描述字,它在该服务器的生命周期内一直存在。内核为每个由服务器进程接受的客户连接创建了一个已连接socket描述字,当服务器完成了对某个客户的服务,相应的已连接socket描述字就被关闭。
3.5、read()、write()等函数
万事具备只欠东风,至此服务器与客户已经建立好连接了。可以调用网络I/O进行读写操作了,即实现了网咯中不同进程之间的通信!网络I/O操作有下面几组:
read()/write()
recv()/send()
readv()/writev()
recvmsg()/sendmsg()
recvfrom()/sendto()
我推荐使用recvmsg()/sendmsg()函数,这两个函数是最通用的I/O函数,实际上可以把上面的其它函数都替换成这两个函数。它们的声明如下:
#include
ssize_t read(int fd, void *buf, size_t count); ssize_t write(int fd, const void *buf, size_t count);
#include #include
ssize_t send(int sockfd, const void *buf, size_t len, int flags); ssize_t recv(int sockfd, void *buf, size_t len, int flags);
ssize_t sendto(int sockfd, const void *buf, size_t len, int flags, const struct sockaddr *dest_addr, socklen_t addrlen); ssize_t recvfrom(int sockfd, void *buf, size_t len, int flags, struct sockaddr *src_addr, socklen_t *addrlen);
ssize_t sendmsg(int sockfd, const struct msghdr *msg, int flags); ssize_t recvmsg(int sockfd, struct msghdr *msg, int flags);
read函数是负责从fd中读取内容.当读成功时,read返回实际所读的字节数,如果返回的值是0表示已经读到文件的结束了,小于0表示出现了错误。如果错误为EINTR说明读是由中断引起的,如果是ECONNREST表示网络连接出了问题。
write函数将buf中的nbytes字节内容写入文件描述符fd.成功时返回写的字节 数。失败时返回-1,并设置errno变量。在网络程序中,当我们向套接字文件描述符写时有俩种可能。1)write的返回值大于0,表示写了部分或者是 全部的数据。2)返回的值小于0,此时出现了错误。我们要根据错误类型来处理。如果错误为EINTR表示在写的时候出现了中断错误。如果为EPIPE表示 网络连接出现了问题(对方已经关闭了连接)。
其它的我就不一一介绍这几对I/O函数了,具体参见man文档或者baidu、Google,下面的例子中将使用到send/recv。
3.6、close()函数
在服务器与客户端建立连接之后,会进行一些读写操作,完成了读写操作就要关闭相应的socket描述字,好比操作完打开的文件要调用fclose关闭打开的文件。
#includeint close(int fd);
close一个TCP socket的缺省行为时把该socket标记为以关闭,然后立即返回到调用进程。该描述字不能再由调用进程使用,也就是说不能再作为read或write的第一个参数。
注意:close操作只是使相应socket描述字的引用计数-1,只有当引用计数为0的时候,才会触发TCP客户端向服务器发送终止连接请求。
4、socket中TCP的三次握手建立连接详解
我们知道tcp建立连接要进行“三次握手”,即交换三个分组。大致流程如下:
客户端向服务器发送一个SYN J
服务器向客户端响应一个SYN K,并对SYN J进行确认ACK J+1
客户端再想服务器发一个确认ACK K+1
只有就完了三次握手,但是这个三次握手发生在socket的那几个函数中呢?请看下图:
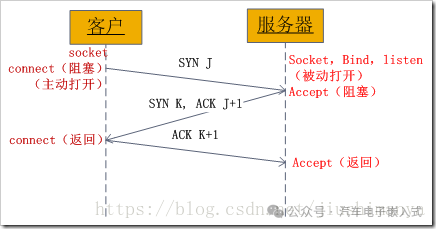
图1、socket中发送的TCP三次握手
从图中可以看出,当客户端调用connect时,触发了连接请求,向服务器发送了SYN J包,这时connect进入阻塞状态;服务器监听到连接请求,即收到SYN J包,调用accept函数接收请求向客户端发送SYN K ,ACK J+1,这时accept进入阻塞状态;客户端收到服务器的SYN K ,ACK J+1之后,这时connect返回,并对SYN K进行确认;服务器收到ACK K+1时,accept返回,至此三次握手完毕,连接建立。
总结:客户端的connect在三次握手的第二个次返回,而服务器端的accept在三次握手的第三次返回。
5、socket中TCP的四次握手释放连接详解
上面介绍了socket中TCP的三次握手建立过程,及其涉及的socket函数。现在我们介绍socket中的四次握手释放连接的过程,请看下图:
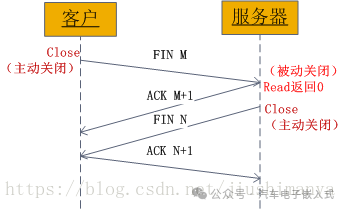
图2、socket中发送的TCP四次握手
图示过程如下:
某个应用进程首先调用close主动关闭连接,这时TCP发送一个FIN M;
另一端接收到FIN M之后,执行被动关闭,对这个FIN进行确认。它的接收也作为文件结束符传递给应用进程,因为FIN的接收意味着应用进程在相应的连接上再也接收不到额外数据;
一段时间之后,接收到文件结束符的应用进程调用close关闭它的socket。这导致它的TCP也发送一个FIN N;
接收到这个FIN的源发送端TCP对它进行确认。
这样每个方向上都有一个FIN和ACK。
6.下面给出实现的一个实例
首先,先给出实现的截图
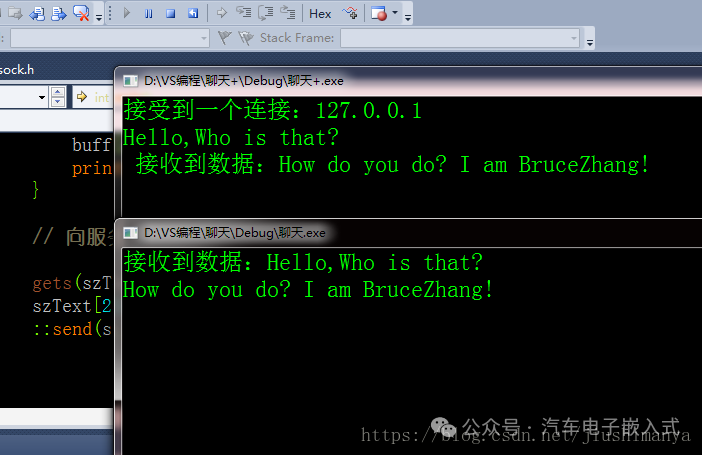
服务器端代码如下:
[cpp] view plaincopyprint?
#include "InitSock.h"#include#includeusing namespace std;CInitSock initSock; int main(){SOCKET sListen = ::socket(AF_INET, SOCK_STREAM, IPPROTO_TCP);if(sListen == INVALID_SOCKET){printf("Failed socket() \n");return 0;}sockaddr_in sin;sin.sin_family = AF_INET;sin.sin_port = htons(4567); sin.sin_addr.S_un.S_addr = INADDR_ANY;if(::bind(sListen, (LPSOCKADDR)&sin, sizeof(sin)) == SOCKET_ERROR){printf("Failed bind() \n");return 0;}if(::listen(sListen, 2) == SOCKET_ERROR){printf("Failed listen() \n");return 0;}sockaddr_in remoteAddr;int nAddrLen = sizeof(remoteAddr);SOCKET sClient = 0;char szText[] = " TCP Server Demo! \r\n";while(sClient==0){sClient = ::accept(sListen, (SOCKADDR*)&remoteAddr, &nAddrLen);if(sClient == INVALID_SOCKET){printf("Failed accept()");}printf("接受到一个连接:%s \r\n", inet_ntoa(remoteAddr.sin_addr));continue ;}while(TRUE){gets(szText) ;::send(sClient, szText, strlen(szText), 0);char buff[256] ;int nRecv = ::recv(sClient, buff, 256, 0);if(nRecv > 0){buff[nRecv] = '\0';printf(" 接收到数据:%s\n", buff);}}::closesocket(sClient);::closesocket(sListen);return 0;}
客户端代码:
#include "InitSock.h"#include#includeusing namespace std;CInitSock initSock; int main(){SOCKET s = ::socket(AF_INET, SOCK_STREAM, IPPROTO_TCP);if(s == INVALID_SOCKET){printf(" Failed socket() \n");return 0;}sockaddr_in servAddr;servAddr.sin_family = AF_INET;servAddr.sin_port = htons(4567);servAddr.sin_addr.S_un.S_addr = inet_addr("127.0.0.1");if(::connect(s, (sockaddr*)&servAddr, sizeof(servAddr)) == -1){printf(" Failed connect() \n");return 0;}char buff[256];char szText[256] ;while(TRUE){int nRecv = ::recv(s, buff, 256, 0);if(nRecv > 0){buff[nRecv] = '\0';printf("接收到数据:%s\n", buff);}gets(szText) ;szText[255] = '\0';::send(s, szText, strlen(szText), 0) ;}::closesocket(s);return 0;}
封装的InitSock.h[cpp] view plaincopyprint?#include#include#include#include#pragma comment(lib, "WS2_32") class CInitSock{public:CInitSock(BYTE minorVer = 2, BYTE majorVer = 2){WSADATA wsaData;WORD sockVersion = MAKEWORD(minorVer, majorVer);if(::WSAStartup(sockVersion, &wsaData) != 0){exit(0);}}~CInitSock(){::WSACleanup();}};
本文来源于网络,原文链接:https://blog.csdn.net/jiushimanya/article/details/82684525
