模仿人类皮肤触觉感知特征的电子器件通常被称为触觉传感器,由于其类皮肤感知能力和优异柔韧性,在假肢、智能机器人和可穿戴医疗监测领域具有巨大的应用前景。近年来,类肤触觉感知取得了较大进展,学者们通过微纳结构和仿生结构的设计,开发了一系列具有高灵敏度、宽响应范围和快响应时间特性的高性能触觉传感器。这些传感特性可以使智能装置精准快速的识别物体形状、位置和接触力,从而实现简单日常任务的操纵。然而,随着物联网和人工智能的迅速发展,新一代人机交互设备需要触觉感知系统具备更精确和更智能的交互能力,如服务机器人对易碎物体的安全抓取、医疗机器人对器官和皮肤健康状态的远程诊断、工业机器人对水果成熟度的智能识别。这些功能的实现需要触觉感知和柔软度识别能力的有效结合。但目前物体柔软度检测设备存在柔韧性不足、体积大和结构复杂等问题,使其难以与柔性触觉传感单元有效集成。因此,亟需开发一种集触觉感知和柔软度识别能力为一体的多功能柔性传感器,以满足未来人机交互感知系统的需求。
为了解决这一问题,哈尔滨工业大学胡平安教授团队设计和制备了一种由中心孔梯度结构压力传感器和平面结构应变传感器组成的集成结构触觉传感器(图1)。其中,由高结构压缩和梯度压缩特性的梯度结构功能层和柔性电极组成的压力传感器可感知所施加压力(图2),PDMS/CNTs应变传感器可识别目标物体的拉伸应变,并通过两者的协同效应和相对变化关系可使集成结构触觉传感器实现柔软度识别和触觉感知。具体地,随着目标物体的杨氏模量从2.74
MPa降至0.45 MPa,传感器的柔软度评价参数(SC)也从 0.14 增至
0.47,展现了对柔软度的精准识别能力(图3)。同时,它还具有10.55 kPa-1的高灵敏度和0-1000
kPa的超宽线性范围,显示出卓越的触觉感知性能。此外,开发了基于集成结构触觉传感器的智能机械手系统,它可以精准识别软泡沫和玻璃的软硬度并准确抓取,显示出类肤般的感知和抓取能力(图4)。因此,中心孔梯度/平面集成结构触觉传感器为新一代人工智能设备的类肤触觉感知系统提供了一种策略。该研究以题为“A Skin-inspired High-performance Tactile Sensor for Accurate Recognition of Object Softness”的论文发表在最新一期《ACS Nano》上。
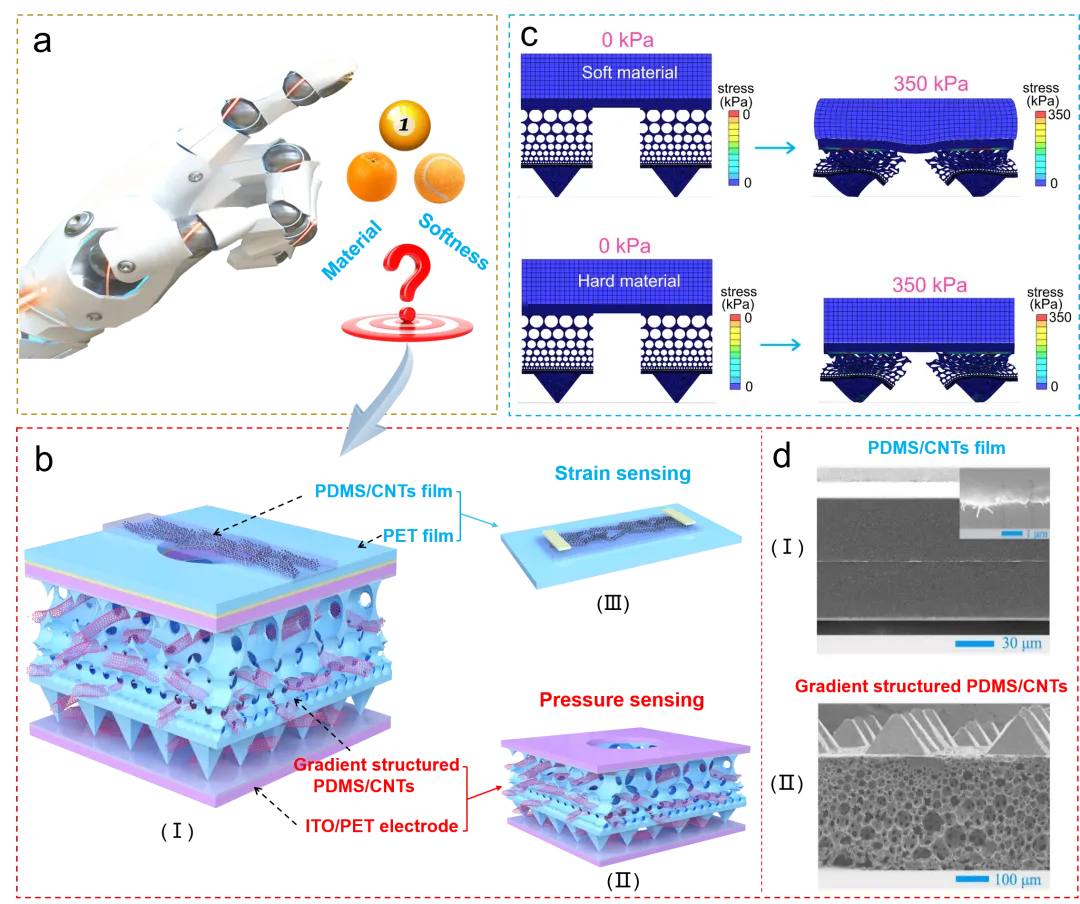
图1 可精准识别柔软度的集成结构触觉传感器的设计和构型
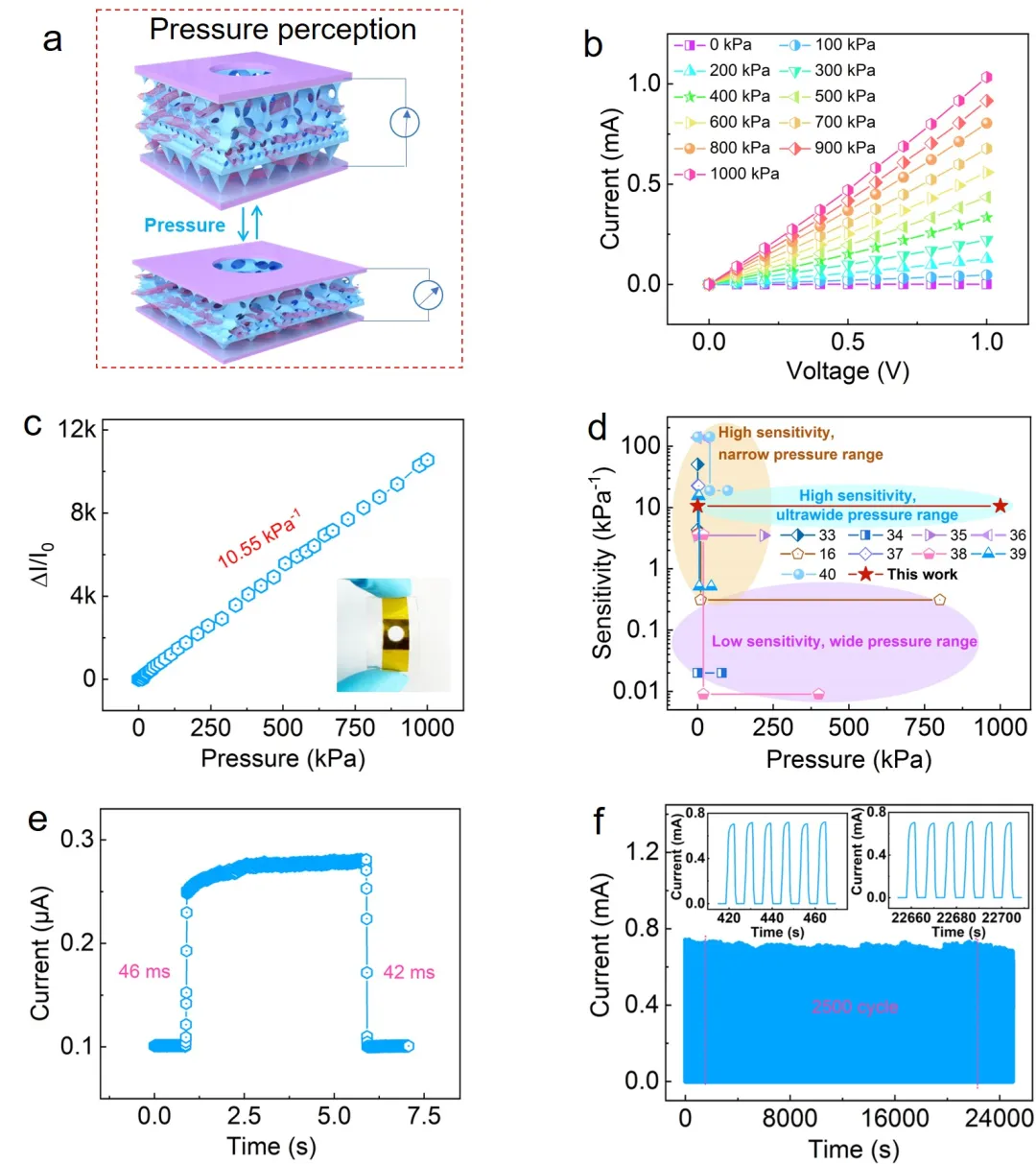
图2 中心孔梯度结构压力传感器的感知性能
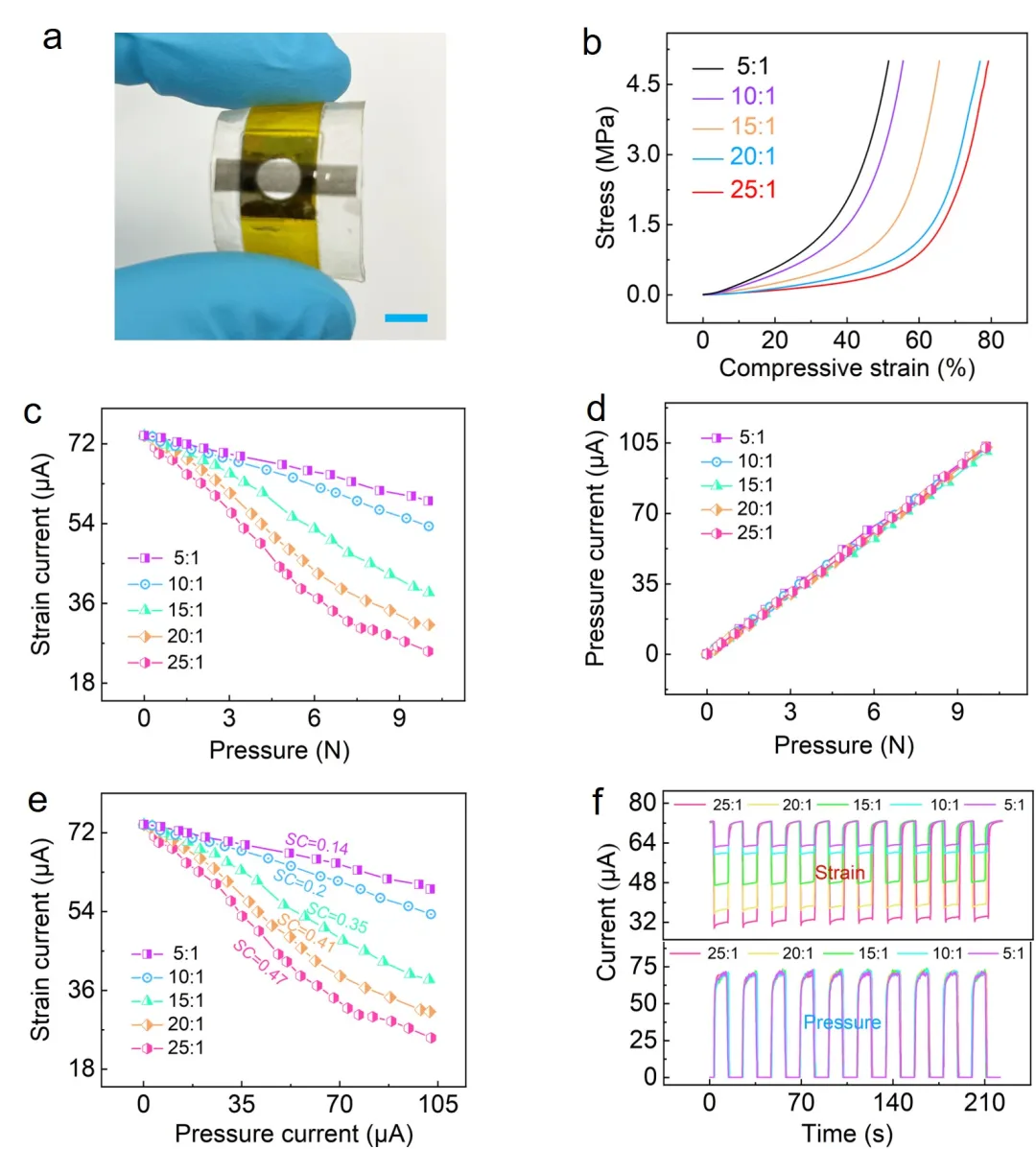
图3 集成结构触觉传感器的高分辨率的柔软度识别能力
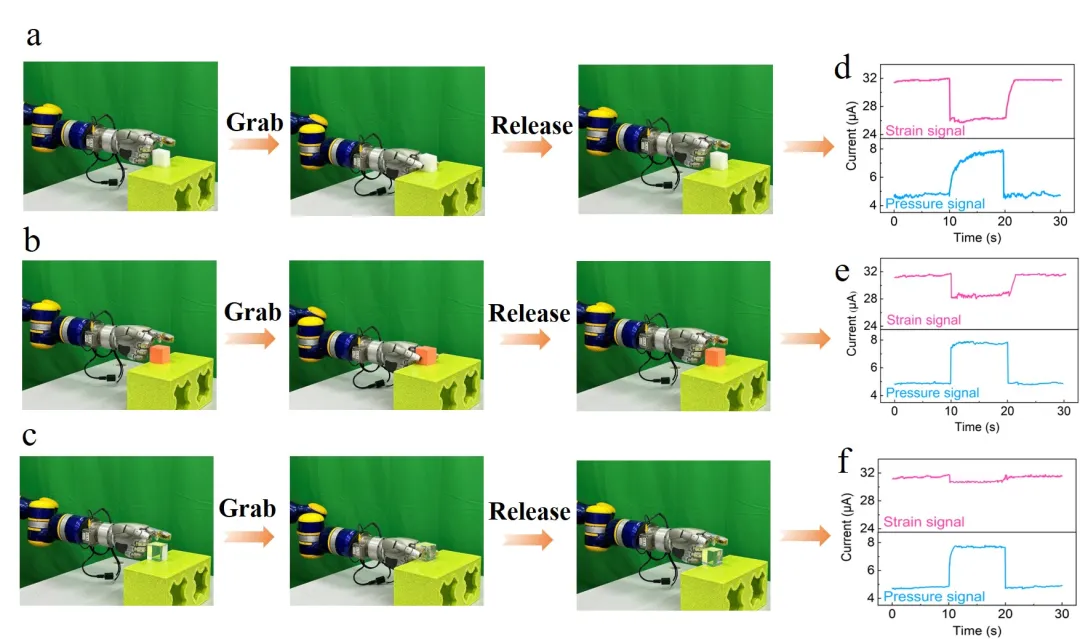
图4 搭载集成结构触觉传感器的智能机器人的类肤感知能力总结:作者提出了一种由中心孔梯度结构压力传感器和平面结构应变传感器组成的集成触觉传感器。通过压力传感器感测所施加压力和应变传感器识别目标物体应变的协同效应实现了对柔软度的识别和触觉的感知。具体地,随着目标物体的杨氏模量从2.74
MPa逐步降低至0.45
MPa,集成结构触觉传感器的柔软度评价参数(SC)从0.14逐步增加到0.47,展现了精确的柔软度识别能力。同时,它还具有10.55 kPa–1的高灵敏度和0–1000 kPa的超宽线性范围,显示出优异的触觉感知性能。此外,开发了基于集成结构触觉传感器的智能机械手系统,该系统可以识别软泡沫和玻璃的柔软度并准确抓握,呈现出类肤般的感知和抓握能力。延伸阅读:
《触觉技术及市场-2022版》
《First Sensor工业级STARe压力传感器芯片产品分析》
《博世气压传感器BMP581产品分析》
《Merit Sensor压力传感器及MEMS芯片分析》




