
01
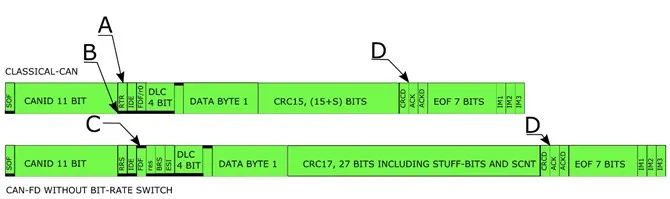
CAN FD提高位速率的同时提供更短的CAN帧
- 延迟时间更短.
- 更好的实时性能
- 更高的带宽
02
CAN FD可以在CAN帧中容纳从8到64字节更多的数据
- 相对更少的系统开销 = 更好的数据吞吐量
- 发送较大数据对象时,软件更简单高效
03
CAN FD具有更高性能的CRC算法
- 降低未检测到错误的风险
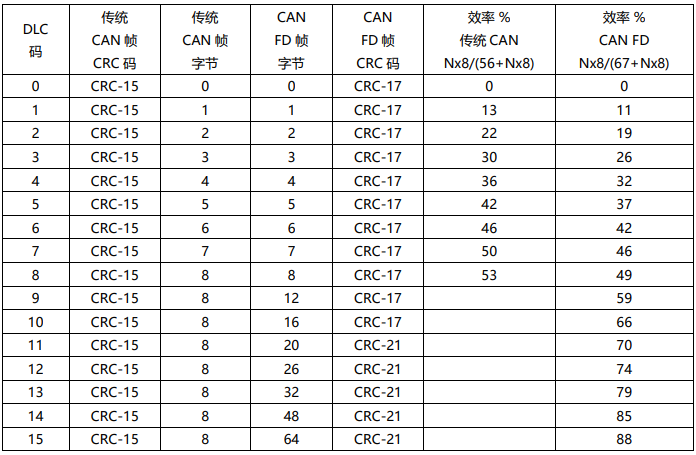
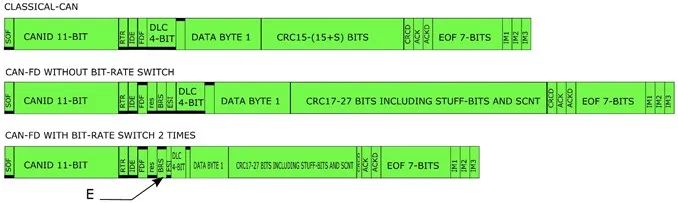

总之,具有高位速率的 CAN FD 将增加实时性能,因为较高的位速率使得 CAN 帧在传送时间上更短,从而减少通信中的延迟。通过在每个帧中传送更多数据,可以增加数据吞吐量,但是如果不结合使用较高的位速率,这将降低实时性能。在许多情况下,编程中会使用 64 字节长的 CAN 帧,这通常在系统暂停且没有实时控制运行时完成。即使没有实时需求,使用更高的位速率来提高数据吞吐量仍然有利,并缩短下载时间。
来源:智能网联汽车网
--END--