
前言
自1885年卡尔·本茨研制出世界第一辆三轮马车式汽车至今,汽车产业已经正式走过了139年,作为工业的重要组成部分,汽车制造业随着工业流水线的设立、内燃机的发明、新式能源的利用、智能系统的引入,已逐步将汽车从简单的交通代步工具转变为高新技术集聚化的智能平台。在百余年的发展里,从安全性、舒适性、便捷性等实用角度出发,通过汽车电子电气架构的统合,汽车已可以将万余零部件中的各类传感器、控制器、执行器整合在一起,提供满足消费者需求的多种功能。

世界第一辆三轮马车式汽车
汽车电子电气架构(EEA),可以类比为人体神经系统,统御整车功能,以实现价值。
但在电子电气架构研发迭代的过程中,我们必须要看到出现了很多问题,诸如“在各类新型电子器件不断出现的行业背景下,如何保障器件间的良好协同工作与高效数据交互”、“各家车企为实现自家生态小闭环而设置的EEA差异,导致架构不兼容发生软件较难统一标准”等,均是汽车行业创新和发展的限制。
本文主要以EEA的演变历程为切入点,对其发展历程展开简析。
EEA的技术路线演进
2007年美国德尔福公司最早提出了汽车电子电气架构(Electrical/Electronic Architecture, EEA)的概念,指集合了汽车的电子电气系统原理设计、中央电器盒设计、连接器设计、电子电气分配系统等设计为一体的整车电子电气解决方案。2020年德国博世公司提出,EEA的演进趋势,将由分布式ECU向域控制/中央集中架构方向发展,具体趋势发展路径为:
阶段1——分布式电子电气架构(模块化→集成化)
阶段2——(跨)域集中电子电气架构(域控制集中→跨域融合)
阶段3——集中式的汽车电子电气架构(车载电脑→车-云计算)
主要依赖中央网关和CAN总线。本阶段随着功能的不断增加,所需控制器数量增加,导致带宽严重不足,为了应对这一问题,架构进行了网络扩展和网关增加,从而推动了EEA的进一步演化。
EEA的设计发生了显著变化,基于主干网和(跨)域控制器进行工作。和阶段1一样,功能的增加,最终导致带宽紧张,然而这两个阶段的不同点是,在阶段2随着功能需求的日益增长,CAN通讯和控制器的低性能已显得力不从心。为此,总线技术的革新、MCU性能的增进以及SOC性能的提升成为了关键驱动力,这些技术的进步促使功能域的功能自主实现了集中化,进而诞生了域控制器,近年自动驾驶汽车,如特斯拉、问界对于域控制器的使用,也印证了这一点。
EEA目前正处于从过去的分布式迈向域集中式的转变过程中,有行业观点认为,预计到2025年左右就会完成这一转变。自2025年起,将开启跨域的融合时代,也就是转变为“中央+区域”(Central&Zonal)计算的EEA时代。
集中式的汽车电子电气架构的发展路线
集中式的汽车电子电气架构已作为汽车关键技术升级方向,受到企业行业的普遍认同,各大车企、一级供应商等均在该方向积极筹划与落地实施。
就现阶段行业实际发展来看,目前技术规划和产品正处于发展阶段。
阶段3的EEA支持通过中央计算平台和区域控制器以及传感器、执行器和智能传感器执行器的组合,利用以太网的TSN功能实现中央与区域之间的连接。区域控制器则能够基于传感器执行器的布局,实现就近介入,提升系统响应效率。车的各种传感器和执行器可被软件定义和控制,初步实现软件定义汽车功能。
整车级软件架构是成熟阶段和发展阶段的分水岭,尤其是在统一的软件操作系统、中间件、应用程序方面。
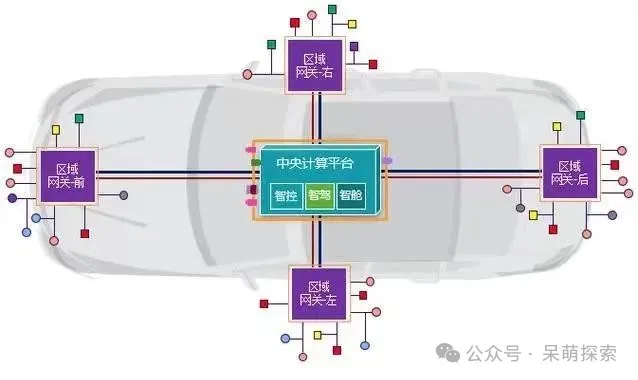
中央—区域EE架构
一体式操作系统集成了中央计算平台以及区域控制器的各类硬件组件,涵盖了车辆上所有的传感器、执行器以及智能传感执行器的功能。该系统的核心在于中央计算平台或云端,它们负责部署和管理汽车应用层软件,确保各项功能的顺畅运行。
在EEA的终极形态中,中央计算平台将如同大脑般,拥有理解环境、思考策略、做出决策、平衡资源以及控制运动的核心能力。而这一切的实现,离不开一个关键的组件——统一的域控制器。
统一的域控制器不仅融合了座舱与车身控制的核心功能,更通过高速通讯网络实现了计算单元间的无缝连接与信息共享。这一设计不仅优化了软件组合,避免了冗余,还大大提升了系统的整体性能。
在这一过程中,区域控制器发挥了至关重要的作用。它一方面负责实时收集并上传传感器数据,确保中央计算平台能够精准感知车辆状态与外部环境;另一方面,它还负责下发指令,精准控制硬件驱动与供电系统,保障车辆各项功能的稳定运行。
更为出色的是,区域控制器还将具备部分自主决策算法的执行能力。这一能力不仅可保证系统的快速响应和低延迟,还能进一步减轻中央计算平台的负担,使得整个系统更加高效、稳定。
除了一体式操作系统和统一的域控制器能力,ECU数量也将大幅减少,控制器软件将进行重组,以进一步优化成本、效率、延迟和性能。子系统需要进行SOA化重构,以分离控制和逻辑,但整个功能的需求不变。
终极形态的EEA
是对汽车新功能开发流程的革新
实现了终极形态的EEA,无需再对“控制”软件进行重复开发,只需专注于“逻辑”软件的研发。功能开发团队轻量化,可以高效快速完成软件开发,产品经理验证后也能快速迭代。
区域控制器以下的部分几乎可保持不变,这使得多个项目能够全面复用或进行裁剪复用,同时“控制”软件也将展现出高度的可复用性,进一步简化开发流程。这种解耦的软件架构使得在新增或变更功能时,如果产生任何影响,都能更容易地进行准确、全面的分析,从而确保系统的稳定性和可靠性。
控制器、软件新增功能、软件变更、测试等的成本均会大幅度下降。
对EEA的未来构想
EEA的演化,具体的方案业界并没有达成一致,但是大致的方向毫无疑问,是向着域控融合、中央融合、车云融合的方向发展,EEA从以CAN网络为骨干网的分布式架构,向车载以太网为骨干网和高速CAN或Flex Ray配合的,高速、集中的网络通信融合大域控、中央控制器势在必行。
在编者的畅想中,EEA的终极形态将借助技术实现效益的增长和成本的降低,迎来质变。编者还为此提出了一个智能汽车创新应用构想。
道路事件预测模型:一个高效的道路事件预测模型,整合了车辆温湿度传感器、摄像头等的数据,以确保数据的实时性与精准性。该模型通过统一的域控制器,支持快速分析道路数据,预测道路湿滑、行人活动模式等变化,并识别、预测出事故高发的特殊路段。一旦预测到潜在的道路事件,系统会迅速通知用户,并推荐安全的行驶路线,甚至自动接管驾驶以规避潜在风险,以减少事故的发生,确保行驶安全。
结束语
随着汽车技术的飞速进步,EEA的演进之路也愈发清晰。从分布式ECU到中央集中架构,再到未来的车云融合,每一步都凝结着行业内的智慧与努力。编者相信随着技术的不断进步,EEA的未来发展会被注入更多的活力与创新,也期待着EEA为我们带来更多的惊喜和可能性。
全文简写专业名词解释
EEA:Electrical/Electronic Architecture,电子电气架构;
ECU:Elecmal Control Unit,电子控制单元;
CAN:Controller Area Network,控制器域网;
MCU:Microcontroller Unit,微控制单元;
SOC:System of Chip,系统级别芯片;
TSN:Time-Sensitive Networking,时间敏感网络;
SOA:Service-Oriented Architecture,面向服务的架构;
OTA:Over-the-Air Technology,空中下载技术。
-END-