

本文约17,000字,建议收藏阅读
作者 | 北湾南巷
本文旨在深入探讨现代汽车电子系统中关键的通信协议,包括CAN(Controller Area Network)、CAN FD(Flexible Data-Rate)、CAN XL(Extended Length)、以及以太网协议,并分析它们在汽车应用中的具体表现和优势。
#01
CAN协议: CAN协议最初由Bosch开发,已成为汽车领域中最广泛应用的网络协议之一。它具有高度可靠的消息传递能力和实时性,适用于控制系统和传感器之间的通信。CAN协议的优势包括低成本、抗干扰能力强、支持多节点和实时响应。然而,传统的CAN协议在数据传输速率上存在限制,无法满足现代复杂系统对高带宽的需求。
CAN FD协议: 为了克服传统CAN协议的带宽限制,CAN FD协议应运而生。CAN FD允许更高的数据传输速率和更大的数据帧,提供了更灵活的数据传输选项。它保留了传统CAN的实时性和可靠性优势,同时能够处理更多的数据量,适应了现代汽车系统日益增长的数据需求。
CAN XL协议: CAN XL是CAN FD的进一步扩展,旨在进一步增加数据传输速率和灵活性。它支持更大的数据帧和更高的传输速率,为未来的汽车应用提供了更多的扩展性和性能潜力。CAN XL协议在处理复杂的汽车控制和传感器数据时能够提供更高的效率和响应速度。
以太网协议: 随着汽车电子系统变得更加复杂和互联,以太网协议开始在汽车领域中崭露头角。以太网具有更高的数据传输速率和更大的带宽,能够支持大规模数据的传输和实时处理需求。它使得车载网络能够与云服务、高清视频流、远程诊断等现代汽车应用无缝集成。
优势分析:
CAN系列协议的优势: 确保了实时性和可靠性,适用于对延迟和稳定性要求高的控制应用,如发动机控制、刹车系统等。
以太网协议的优势: 提供了更高的带宽和扩展性,适用于处理大规模数据传输,支持高清视频、大容量软件更新等应用,有助于实现高级驾驶辅助系统(ADAS)和自动驾驶技术的发展。
综上所述,本文将深入分析每种协议的特点、适用场景以及在现代汽车电子系统中的具体应用,以帮助读者更好地理解和应用这些关键的通信技术。
#02
2.1、CAN简介
基本概念:
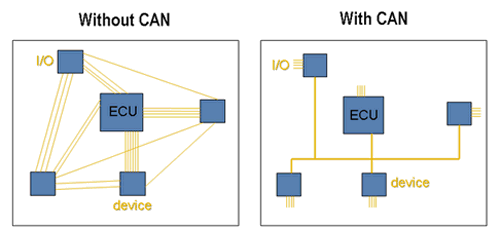
CAN(Controller Area Network,控制器局域网络)是一种串行通信协议,最初由德国Bosch公司在1983年提出,旨在解决汽车电子系统中节点间通信的问题。它被设计用于在车辆内部各个控制单元(ECU)之间进行可靠且实时的数据传输,如发动机控制单元、制动系统、仪表盘等。
特点:
实时性: CAN协议具有极高的实时性,能够在微秒级别内完成数据传输,适用于需要快速响应的控制应用。
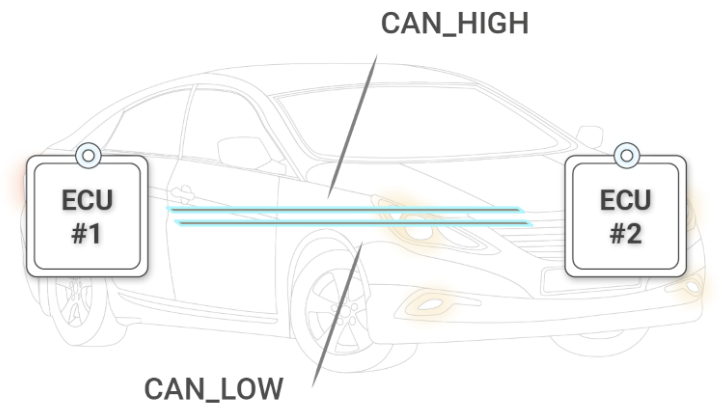
可靠性: 通过差分信号传输和错误检测机制(如CRC校验),CAN协议能够确保数据传输的高度可靠性,即使在恶劣的电磁环境中也能有效运行。
抗干扰能力强: CAN协议采用差分信号传输,使其对电磁干扰具有良好的抵抗能力,适合车辆这种复杂电磁环境下的应用。
多节点: CAN网络支持多达数百个节点的连接,可以同时进行多个设备之间的通信,例如发动机控制、空调系统、车载娱乐系统等。
低成本: CAN协议的实现成本相对较低,硬件和软件开发都相对简单,这使得它成为了汽车行业普遍采用的标准之一。
历史发展:
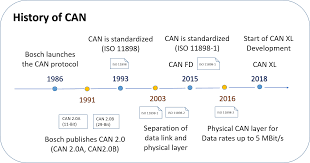
1983年: Bosch公司首次提出CAN协议,用于解决当时汽车电子系统中的通信需求,以取代传统的串行通信方式。
1991年:CAN协议的第一个国际标准ISO 11898发布,确立了CAN的物理层和数据链路层的标准化规范,促进了CAN在全球的广泛应用。
1993年: 发布了CAN协议的第一个扩展版本,主要增加了对更高数据传输速率的支持,为日后CAN FD的发展奠定了基础。
2007年: CAN FD(Flexible Data-Rate,灵活数据率)协议开始在汽车行业引入,允许更高的数据传输速率和更大的数据帧,以适应现代汽车系统对数据量和速率的增加需求。
总结而言,CAN协议由于其高度的实时性、可靠性和适应性,成为了汽车电子控制系统中不可或缺的通信技术之一。随着技术的进步和汽车功能的增加,CAN协议不断演进和优化,以满足日益复杂的汽车电子系统对通信性能的需求。
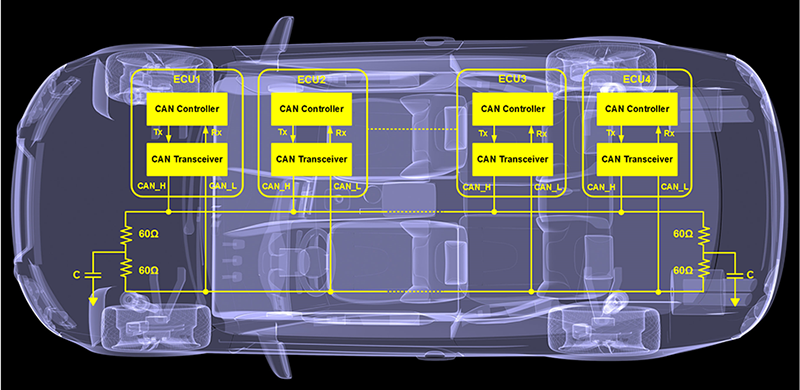
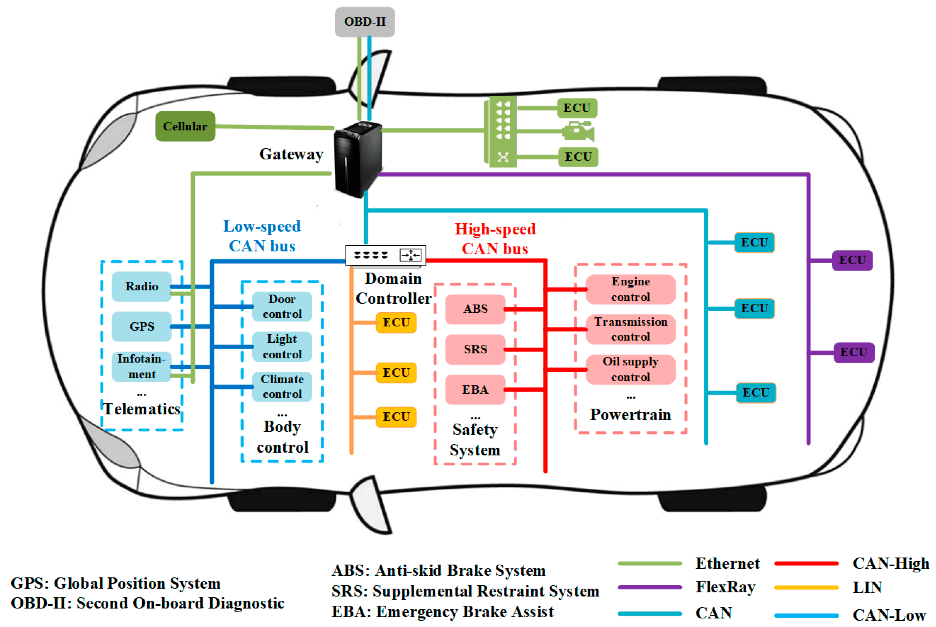
在汽车电子系统中,CAN(Controller Area Network,控制器局域网络)协议有两种主要变体:高速CAN(High-Speed CAN)和低速CAN(Low-Speed CAN),它们适用于不同的应用场景,具有不同的性能特点和技术指标。
2.2、High-Speed CAN
特点和应用:
数据传输速率: 高速CAN的传输速率最高可以达到1 Mbps(百万比特每秒)。
数据负载: 每帧最多8字节的数据。
应用场景:
高速CAN主要用于需要快速、实时数据交换的系统,如发动机控制单元(ECU)、防抱死制动系统(ABS)和其他动力总成及安全系统。
适合于实时性要求较高的应用,确保数据在极短时间内传输和处理。
技术细节:
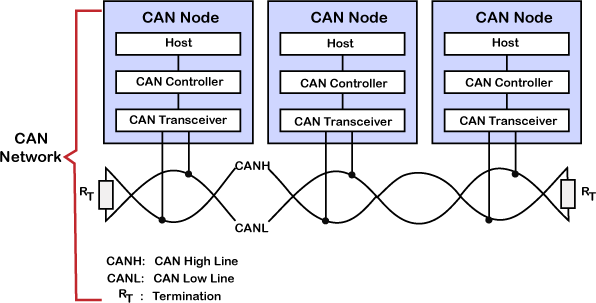
拓扑结构: 通常采用总线拓扑,所有节点并联在一条总线上。
物理层: 使用差分信号传输,具有较强的抗电磁干扰能力。
线缆长度: 随着传输速率的提高,允许的线缆长度会相应减少。例如,1 Mbps时,最大线缆长度大约为40米。
2.3、Low-Speed CAN(或Fault-Tolerant CAN)
特点和应用:
数据传输速率: 低速CAN的传输速率通常为125 Kbps或以下。
数据负载: 每帧最多8字节的数据。
3. 应用场景:
低速CAN适用于对传输速率要求不高的车身控制系统,如电动窗、座椅调节、空调系统和车门控制等。
适合于不需要高速数据传输的非关键系统,提供一种经济高效的通信解决方案。
技术细节:
拓扑结构: 也采用总线拓扑,但具有故障容忍能力(Fault-Tolerant),即使总线上的某些节点或线路出现故障,系统仍能继续运行。
物理层: 允许单线模式运行,在总线一条线出现故障时,仍能通过另一条线传输数据。
线缆长度: 低速CAN允许更长的线缆长度,在125 Kbps时,最大线缆长度可以达到500米。
指标 | 高速CAN | 低速CAN |
数据传输速率 | 最高1 Mbps | 通常125 Kbps或以下 |
数据负载 | 每帧最多8字节 | 每帧最多8字节 |
应用场景 | 发动机控制单元(ECU)、ABS、动力总成及安全系统 | 电动窗、座椅调节、空调系统、车门控制等 |
抗干扰能力 | 较强(差分信号传输) | 较强(差分信号传输,单线模式故障容忍) |
线缆长度 | 1 Mbps时,最大40米 | 125 Kbps时,最大500米 |
拓扑结构 | 总线拓扑 | 总线拓扑(具有故障容忍能力) |
2.4、未来发展趋势
随着汽车电子系统的不断发展,高速CAN和低速CAN在各自领域中将继续发挥重要作用,但也面临着新的挑战和机遇:
高速CAN:未来可能会被更高速的通信协议(如CAN FD和CAN XL)部分取代或补充,以满足更高数据速率和更大数据负载的需求。
低速CAN:将继续在低数据速率应用中保持重要地位,但可能需要进一步提升故障容忍能力和安全性能,以应对更加复杂的车身控制需求。
综上所述,高速CAN和低速CAN各有其特点和应用场景,在汽车电子系统中起着关键作用。选择适合的通信协议能够有效优化系统性能和成本,并为未来的智能化、网联化和自动化发展奠定坚实基础。
2.5、CAN在汽车中的具体应用
CAN在现代汽车中的具体应用非常广泛,涵盖了几乎所有的关键系统和功能模块。
以下是CAN在汽车中的更详细的具体应用:
发动机控制单元(ECU): CAN协议在发动机控制方面起到了至关重要的作用。发动机控制单元通过CAN总线与其他系统和传感器进行通信,监控和控制发动机的各种参数,例如转速、温度、气压和油耗等。这些数据不仅用于优化发动机的性能和燃油效率,还用于确保发动机的运行安全和可靠性。CAN的快速响应能力使得发动机控制单元能够实时调整引擎操作以适应不同的驾驶条件和车辆负载。
变速器控制: 自动变速器系统也依赖于CAN协议进行数据交换和控制。变速器控制单元通过CAN总线接收来自发动机、车速传感器和驾驶员输入的数据,以精确地调整变速箱的换挡时机和方式。这种实时的数据传输和控制能力确保了变速器在各种驾驶条件下的平稳性和高效性。
车身电子系统: CAN协议在车身电子系统中的应用涉及多个功能模块,如车窗控制、电动门锁、空调控制、灯光管理等。这些系统使用CAN总线进行内部和外部设备的数据交换,使得驾驶员和乘客能够通过中央控制单元或者直接操作单元来控制车辆的各种功能。例如,通过CAN总线,车窗控制模块可以接收来自驾驶员和乘客的操作指令,并确保窗户的快速和准确地开闭动作。
制动系统和安全功能: 现代汽车的防抱死制动系统(ABS)、电子稳定程序(ESP)、牵引力控制系统(TCS)等安全功能也依赖于CAN协议进行实时数据传输和操作指令的交换。这些系统通过CAN总线与车辆的各个部件和传感器连接,确保在紧急情况下能够快速而准确地响应,提高车辆的操控性和安全性。
信息娱乐和导航系统: 车载信息娱乐系统和导航系统也使用CAN总线与其他系统进行数据交换。例如,音频系统可以通过CAN总线接收来自用户的控制指令,并与车辆其他部件协调工作,以提供高质量的音频体验和导航服务。
总的来说,CAN协议作为汽车电子系统中最基础和核心的通信技术之一,为各种系统和功能模块之间的高效协作提供了必要的平台。它的实时性、可靠性和适应性使得现代汽车能够在不同的驾驶和使用条件下保持高效和安全的运行状态。
2.6、CAN协议的优势与限制
优势:
高可靠性: CAN协议通过差分信号传输和错误检测机制(如CRC校验)确保了数据传输的高度可靠性。它能够检测并纠正错误帧,或者在发现无法纠正的错误时放弃传输,从而有效地减少了数据传输中的错误率。
实时性: CAN协议设计初衷就是为了应对实时控制要求,能够在微秒级别内完成数据的传输。这种快速响应能力使得CAN协议非常适合需要及时反馈和控制的应用,如发动机控制、制动系统和安全系统等。
多主控制: CAN总线支持多主控制结构,允许多个节点同时发送数据,而无需中心节点的调度。这种分布式控制结构使得CAN协议在大型汽车系统中能够有效地管理和协调各个子系统和传感器。
抗干扰能力强: CAN协议采用差分信号传输,使其对电磁干扰有很好的抵抗能力。这使得CAN总线能够在车辆的复杂电磁环境中稳定运行,不受外界干扰影响数据传输的可靠性。
限制:
数据速率较低: 传统的CAN协议的数据传输速率通常限制在1 Mbps。尽管这在许多控制应用中是足够的,但对于需要处理大量数据或高速传输的应用(如高清视频传输或大数据量传感器),其带宽可能显得不足。
数据负载有限: CAN协议的数据帧大小受到限制,通常最大为8字节(经典CAN)。这在某些情况下可能限制了数据的传输能力和灵活性,尤其是在需要传输大块数据或者复杂数据结构时可能显得不够。
网络拓扑结构限制: CAN总线的物理拓扑结构通常是线性的总线结构,这种结构限制了系统的扩展性和灵活性。虽然可以通过网桥或者集线器来扩展网络,但相比于更灵活的以太网结构,其拓扑结构的设计可能显得有些受限。
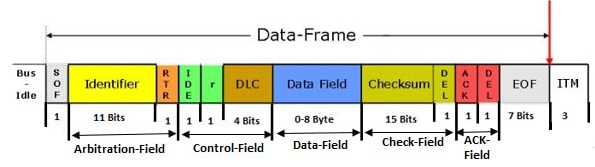
2.7、性能指标数值(以经典CAN为例)
数据传输速率: 通常为1 Mbps。
数据帧大小: 最大为8字节。
最大节点数量: 可支持多达数百个节点。
总体来说,尽管CAN协议在汽车电子系统中有其明显的优势,但在面对现代汽车复杂的数据处理和传输需求时,也面临一些限制,特别是在数据速率和数据负载方面。随着技术的进步,CAN FD和CAN XL等协议的出现已经在一定程度上缓解了这些限制,为更高速率和更大数据量的应用提供了更好的支持。
#03
3.1、CAN FD简介
发展背景:
CAN FD(CAN with Flexible Data Rate,灵活数据率)协议是对传统CAN(Controller Area Network,控制器局域网络)协议的扩展和优化。传统的CAN协议在数据传输速率上存在一定的限制(通常为1 Mbps),这在现代汽车电子系统中,特别是在处理大量传感器数据和高带宽需求时显得不足。因此,CAN FD协议应运而生,旨在提供更高的数据传输速率和更大的数据帧容量,以满足现代汽车系统对数据量和速率的增加需求。
特点:
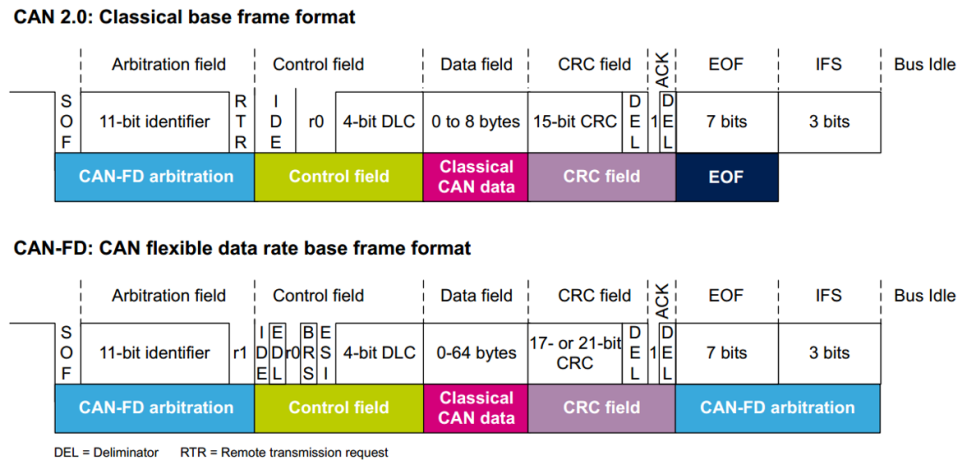
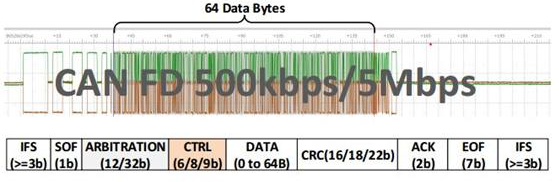
灵活的数据率: CAN FD协议允许在数据传输时动态调整数据速率。传统CAN协议在固定的数据传输速率上限(通常为1 Mbps),而CAN FD可以根据需要提供更高的传输速率,例如可以达到5 Mbps甚至更高,这使得它更适合处理大量数据或者需要快速传输的应用场景。
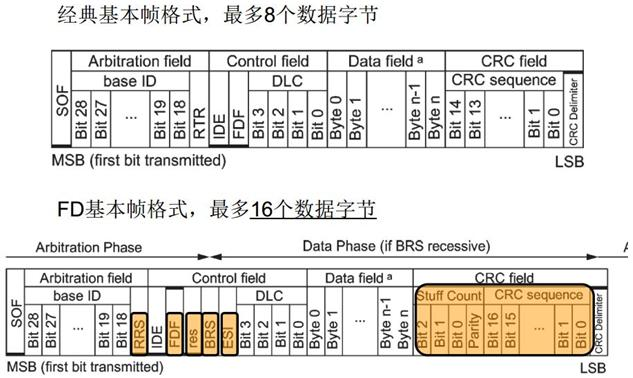
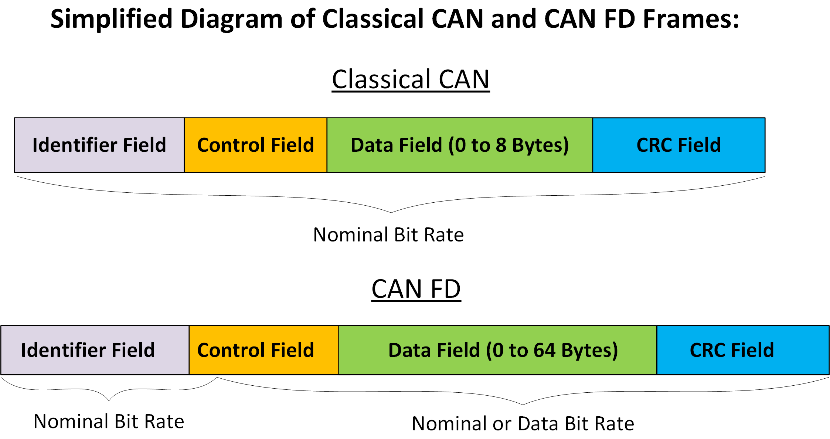
支持更大的数据帧: 传统CAN协议的数据帧大小有限(通常最大为8字节),而CAN FD协议支持更大的数据帧,可以达到64字节。这种增加了的数据帧大小使得CAN FD能够更有效地传输大块数据或者复杂数据结构,例如传感器数据、图像数据等。
向后兼容性: CAN FD协议设计时考虑了向后兼容性,这意味着它可以与传统的CAN协议在同一网络中共存。这种兼容性使得汽车制造商可以逐步升级其现有的CAN网络,而不需要完全替换已有的硬件和设施。
保留了CAN的实时性和可靠性: 尽管增加了数据传输速率和数据帧大小,CAN FD协议仍然保留了CAN协议的实时性和可靠性优势。它仍然能够在微秒级别内完成数据传输,适用于需要及时响应和高度可靠性的控制应用。
技术提升:
物理层优化: CAN FD协议在物理层上做了一些优化,以支持更高的数据传输速率。这些优化包括使用更高的波特率和更精密的时钟同步,以确保数据在传输过程中的稳定性和准确性。
数据链路层改进: 为了支持更大的数据帧和灵活的数据传输速率,CAN FD协议在数据链路层上进行了改进。这些改进包括数据帧格式的调整,以及对数据传输过程中的错误检测和纠正机制的优化,以确保数据传输的高可靠性和完整性。
应用扩展性: CAN FD协议的引入极大地扩展了CAN网络的应用范围。它不仅适用于传统的控制和监测应用,还能够支持更复杂的数据交换需求,如高分辨率传感器数据、视频传输和高级驾驶辅助系统(ADAS)等。
总体来说,CAN FD协议通过提供灵活的数据传输速率和更大的数据帧容量,为现代汽车电子系统带来了显著的性能提升和应用扩展能力。它继承了CAN协议的稳定性和实时性优势,并针对现代汽车复杂的数据处理需求进行了有效的技术优化。
3.2、CAN FD在汽车中的具体应用
1. 高级驾驶辅助系统(ADAS):
高级驾驶辅助系统(ADAS)依赖于精确的传感器数据和快速的实时决策,以提升驾驶安全性和舒适性。CAN FD协议在这方面发挥了关键作用,特别是对于需要更高的数据速率和更大数据负载的应用。
以下是CAN FD在ADAS中的具体应用场景:
雷达系统和摄像头传感器: ADAS系统使用雷达和摄像头等传感器来感知车辆周围的环境和道路条件。这些传感器生成大量的高分辨率数据,如距离、速度、障碍物检测等信息,需要通过CAN FD协议高速传输到主控制单元(ECU)进行实时处理和决策。
自动紧急制动系统(AEB): AEB系统依赖于实时的传感器数据,以便在检测到潜在碰撞危险时迅速采取紧急制动措施。CAN FD协议能够有效地传输这些关键的数据,确保系统能够在最短时间内做出反应,以减少碰撞风险。
自动驾驶功能: 高级的自动驾驶功能需要大量的传感器数据来实现车辆的精确定位、环境感知和路径规划。CAN FD协议提供了足够的带宽和数据帧大小,使得这些复杂的数据可以快速而可靠地在整个车辆系统内传输和处理。
2. 车辆联网:
随着车辆联网技术的发展,现代汽车能够实现与云服务、其他车辆和智能设备的实时数据交换和通信。CAN FD协议在车辆联网中发挥了重要作用,支持以下应用场景:
实时数据传输: 车辆通过CAN FD协议可以与云端服务实现实时数据传输,如车辆位置、驾驶行为、车载媒体内容等。这些数据对于车辆状态监控、远程车辆管理和智能交通管理具有重要意义。
车载诊断和远程服务: CAN FD协议允许车辆系统通过互联网连接进行远程诊断和软件更新。制造商和服务提供商可以通过远程访问CAN FD网络,实时监测车辆的健康状态并提供维护服务,从而降低维护成本并提升车辆的可靠性和安全性。
总体来说,CAN FD协议通过提供更高的数据传输速率、更大的数据帧容量和灵活的数据传输能力,为现代汽车的高级驾驶辅助系统和车辆联网技术带来了显著的技术优势和应用扩展能力。这些优势使得CAN FD成为了越来越多汽车制造商在新车型中采用的首选通信协议之一。
3.3、CAN FD协议的优势与限制
优势:
更高的数据传输速率: CAN FD协议相比传统CAN协议显著提升了数据传输速率。传统CAN协议的数据传输速率通常限制在1 Mbps,而CAN FD协议的最高传输速率可达8 Mbps,这使得它能够更快速地处理大量数据,适用于需要高带宽的应用场景。
更大的数据帧容量: CAN FD协议支持更大的数据帧大小,最大可达64字节(比传统CAN的8字节要大得多)。这种增加的数据帧容量使得CAN FD能够有效地传输大块数据或者复杂数据结构,如高分辨率传感器数据、图像数据等,满足了现代汽车电子系统对更大数据负载的需求。
实时性和可靠性保持: 尽管提升了数据传输速率和数据帧大小,CAN FD协议仍然保持了CAN协议的实时性和可靠性优势。它能够在微秒级别内完成数据传输,适用于需要及时响应和高度可靠性的控制和监测应用。
向后兼容性: CAN FD协议设计时考虑了向后兼容性,这意味着它可以与传统的CAN协议在同一网络中共存。这种兼容性使得汽车制造商可以逐步升级其现有的CAN网络,而不需要完全替换已有的硬件和设施,节约了成本和时间。
限制:
对硬件要求更高: 尽管CAN FD协议带来了更高的性能和数据传输速率,但它也对硬件的要求更高。为了支持更高的数据传输速率,CAN FD网络需要更先进的控制器和传输介质,这可能会增加系统的成本和复杂性。
兼容性问题: 尽管CAN FD协议具有向后兼容性,但与传统CAN设备的兼容性问题仍可能存在。特别是在早期采用传统CAN协议的车辆和设备中,可能需要额外的软件或硬件适配器来确保CAN FD协议的正常运行和兼容性。从经典CAN升级到CAN FD需要更换CAN收发器和CAN控制器。具体来说,收发器需要从支持最高1 Mbps的速率升级到支持最高5 Mbps或更高的速率。控制器需要完全支持CAN FD的链路层协议。如果CAN控制器集成在微控制器(MCU)内,则需要更换整个MCU以确保兼容性。这些硬件更换确保系统能够满足更高数据速率和更大数据帧的需求,从而提高汽车电子系统的性能和可靠性。
3.4、性能指标数值
最高数据传输速率: 可达8 Mbps(传统CAN通常为1 Mbps)。
最大数据帧大小: 支持最多64字节的数据帧(传统CAN通常为8字节)。
总体而言,CAN FD协议通过提供更高的数据传输速率和更大的数据帧容量,显著增强了现代汽车电子系统的数据处理能力和应用灵活性。尽管存在一些硬件要求和兼容性问题,但其优势远大于限制,使得它成为了越来越多汽车制造商和系统集成商在新车型中选择的通信协议。
#04
4.1、CAN XL简介
CAN XL协议(也称为Controller Area Network eXtended Length)是对CAN FD协议的进一步扩展和优化,旨在进一步提升数据传输速率、增加数据帧大小,并提供更强的错误处理能力。CAN XL协议的发展主要是为了应对现代汽车电子系统中日益增长的数据量和复杂性需求。

最新进展和技术特点:
更高的数据传输速率: CAN XL协议相比CAN FD进一步提升了数据传输速率。尽管具体的标准和实现可能有所不同,但通常CAN XL可以支持更高达20 Mbps甚至更高的传输速率。这种高速率使得CAN XL在处理大量传感器数据和高带宽需求的应用中更为有效。
更大的数据帧容量: 类似于CAN FD,CAN XL协议支持更大的数据帧。它能够处理比CAN FD更大的数据帧,这使得它更适合传输更复杂的数据结构,如高分辨率传感器数据、视频流等。

强化的错误处理能力: CAN XL协议在错误处理方面进行了进一步的增强。它引入了更复杂的错误检测和纠正机制,能够在数据传输中更有效地识别和处理错误,提升了系统的可靠性和稳定性。
低功耗设计: 为了适应现代汽车对节能环保的需求,CAN XL协议在设计时考虑了低功耗特性。它能够在提供高性能的同时,有效管理能耗,符合新一代汽车电子系统对节能和环保的要求。
适用于复杂系统集成: CAN XL不仅仅局限于车辆内部的控制和监测应用,它还可以支持复杂的车辆网络和系统集成,如车辆到车辆(V2V)通信、车辆到基础设施(V2I)通信等高级应用场景。
向后兼容性和适应性: 类似于CAN FD,CAN XL协议设计时考虑了向后兼容性,这使得它可以逐步替代现有的CAN和CAN FD网络,并与已有设备和系统兼容,从而实现平稳过渡和更新。
总体而言,CAN XL协议的出现进一步推动了汽车电子系统通信协议的发展,提供了更高的性能和更广泛的应用能力,以满足现代汽车对数据传输速率、数据帧大小和系统可靠性的高要求。随着技术的不断进步和市场的广泛应用,CAN XL协议有望成为未来新一代汽车电子系统中的主流通信标准之一。
4.2、CAN XL在汽车中的具体应用
1. 自动驾驶系统:
自动驾驶系统是现代汽车技术的前沿领域,对数据传输速率和数据负载有极高的要求。CAN XL协议在这方面提供了理想的解决方案,支持超高数据速率和大数据负载,从而满足复杂的自动驾驶系统的需求:
传感器数据处理: 自动驾驶系统依赖于多种传感器,如雷达、激光雷达、摄像头等,来感知车辆周围的环境和道路状况。这些传感器生成大量的高分辨率数据,需要通过高速数据传输进行实时处理和分析。CAN XL协议提供的高达20 Mbps或更高的数据传输速率,使得传感器数据可以快速而可靠地传输到车辆的主控制单元(ECU),以支持复杂的环境感知和决策系统。
高精度定位和地图更新: 自动驾驶系统需要高精度的定位和实时地图数据更新,以便实现精确的路径规划和车辆控制。CAN XL协议的大数据帧能力允许高分辨率的地图和定位数据在车辆内部系统之间进行快速传输和更新,确保驾驶系统始终基于最新和精确的地理信息。
实时决策和控制: 自动驾驶系统要求系统能够在毫秒级别内做出实时决策和控制,以应对突发情况和变化的交通环境。CAN XL协议保证了数据传输的低延迟和高可靠性,为自动驾驶系统提供了必要的实时性能。
2. 车内娱乐系统:
现代汽车的车内娱乐系统越来越依赖于高带宽的音视频传输,以提供乘客优质的娱乐体验。
CAN XL协议在这方面提供了适合高带宽需求的解决方案:
高清音频传输: 车载娱乐系统需要支持高质量的音频流传输,如高清音乐和语音识别。CAN XL协议的高速数据传输能力可以确保音频数据在车辆内部各个娱乐设备之间的快速传输,从而提供清晰、无延迟的音频体验。
高清视频传输: 现代车载娱乐系统通常还包括后座娱乐屏幕或者车内显示屏,用于播放高清视频内容。CAN XL协议的大数据帧容量和高速传输速率能够支持高分辨率视频的流畅播放和快速传输,确保乘客享受到高品质的视频娱乐体验。
游戏和互联功能: 车载娱乐系统还可能包括游戏和互联网功能,需要处理复杂的数据流和实时交互。CAN XL协议的高带宽和数据处理能力使得这些功能在车内系统之间能够稳定运行,同时保持良好的用户体验。
总结来说,CAN XL协议在汽车领域的广泛应用不仅限于自动驾驶系统的高速数据传输需求,还扩展到车内娱乐系统等需要处理大量数据和高带宽的应用场景。其提供的高速率、大数据帧和低延迟的特性,使得CAN XL成为现代汽车电子系统中的重要通信协议之一。
4.3、CAN XL协议的优势与限制
优势:
更高的数据传输速率: CAN XL协议旨在进一步提升数据传输速率,目标是达到甚至超过10 Mbps。这种高速传输能力使得CAN XL适用于处理大量实时数据,如高分辨率传感器数据和复杂的控制信息。
更大的数据帧容量: CAN XL协议支持更大的数据帧,最大可以达到2048字节。相比CAN FD的64字节数据帧上限,CAN XL的更大数据帧容量使得它能够有效处理更复杂的数据结构和大块数据传输,如高分辨率图像和视频流。
向下兼容性: 类似于CAN FD,CAN XL协议设计时考虑了向下兼容性,这意味着它可以与现有的CAN和CAN FD设备和网络兼容。这种兼容性使得CAN XL能够平稳地与现有的汽车电子系统集成,而无需全面更换硬件和设施。
适应复杂系统集成: CAN XL协议不仅仅适用于车辆内部的控制和监测应用,还能够支持更复杂的系统集成,如车辆到车辆(V2V)通信、车辆到基础设施(V2I)通信等高级应用场景。其高速率和大数据帧容量使得它在这些复杂网络环境中表现出色。
限制:
发展中的技术: 尽管CAN XL协议有着明显的技术优势和市场前景,但目前仍处于发展和标准化阶段。实际的量产和普及化尚需时间,需要等待更多汽车制造商和供应商的采用和实施。
成本和复杂性: 实现更高的数据传输速率和更大的数据帧容量可能需要更先进的硬件和控制器,这可能会增加系统的成本和复杂性。特别是在现有的CAN和CAN FD网络之上实施CAN XL协议时,需要考虑硬件和软件的升级成本。
市场适应性和标准化: 尽管CAN XL协议有望成为未来汽车电子系统的主流通信标准之一,但其市场适应性和标准化仍面临一些挑战。汽车行业需要共同努力来推动CAN XL协议的标准化进程,并确保其能够满足全球汽车制造商和供应商的需求。
4.4、性能指标数值
目标数据传输速率: 高达10 Mbps或更高。
最大数据帧大小: 支持最多2048字节的数据帧。
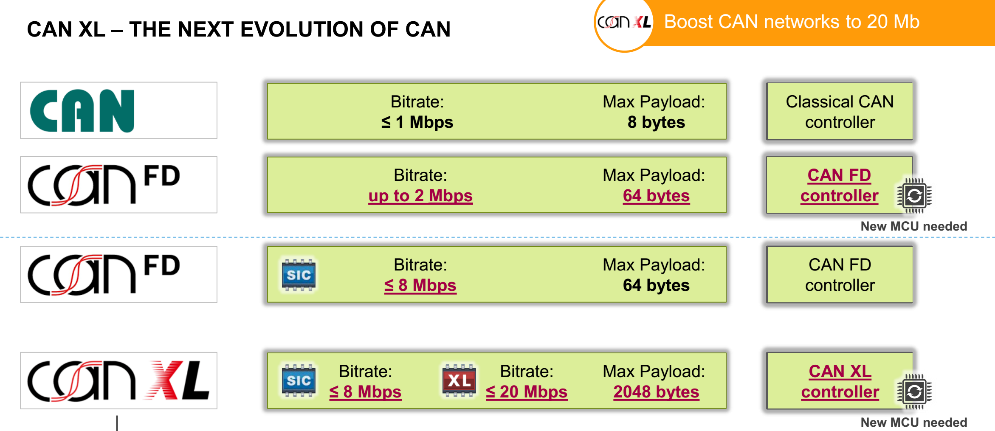
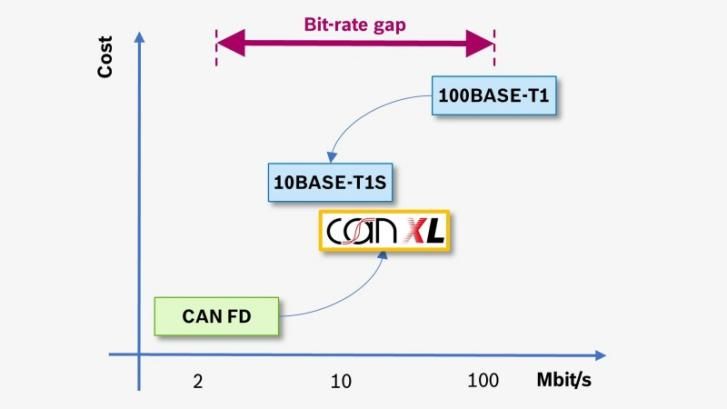
总体而言,CAN XL协议作为CAN FD的进一步扩展,为现代汽车电子系统带来了显著的技术优势和应用扩展能力。尽管其在发展中仍面临一些挑战和限制,但其高速率、大数据帧和向下兼容性的特性使得它成为未来汽车通信协议中的重要发展方向之一。
#05
5.1、以太网简介
基本概念:
以太网(Ethernet)是一种计算机网络技术,最初用于局域网(LAN)中,后来扩展到广域网(WAN)和城域网(MAN)。它是一种基于帧的数据通信协议,使用CSMA/CD(Carrier Sense Multiple Access with Collision Detection,载波监听多点访问/碰撞检测)技术,能够提供高速的数据传输和可靠的连接。
发展历史:
诞生和发展: 以太网最早由美国Xerox公司在1970年代末开发,用于连接公司内部的计算机和打印机,称为Xerox Ethernet。后来,由于其简单易用和可靠性,以及IEEE 802.3标准化的推广,以太网迅速成为主流的局域网技术。
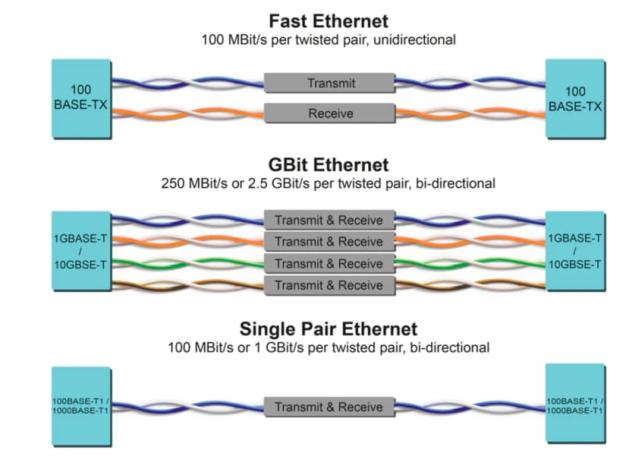
标准化和演变: 1983年,IEEE开始制定802.3系列标准,以太网协议得到了更广泛的标准化和应用。随着技术的进步和需求的增长,以太网的速度从最初的10 Mbps(10BASE-T)发展到了100 Mbps(Fast Ethernet),1 Gbps(Gigabit Ethernet),甚至10 Gbps(10 Gigabit Ethernet)和更高速率的版本。
技术特点:
数据传输速率: 以太网支持多种数据传输速率,从最低的10 Mbps到最高可达数10Gbps,随着技术的进步和硬件的改进,速率不断提升,以满足不同应用的需求。
帧结构: 数据在以太网中以帧(Frame)的形式传输。每个以太网帧包括目标地址、源地址、数据字段和校验字段等。帧的大小通常在64字节至1518字节之间,但支持更大帧的版本也在逐渐推出,以提高数据传输效率。
碰撞检测技术: CSMA/CD技术是以太网中用于多点访问的一种策略。它允许多个设备在同一物理介质上传输数据,并且能够检测和处理碰撞,以确保数据的完整性和可靠性。
灵活性和扩展性: 以太网具有良好的灵活性和扩展性,能够支持不同的拓扑结构(如星型、总线型、环形等)和介质(如双绞线、光纤),以适应不同规模和需求的网络。
广泛应用: 除了传统的办公室局域网,以太网还被广泛应用于数据中心网络、云计算环境、工业控制系统以及近年来的汽车领域。
总体而言,以太网作为一种高速、灵活和可靠的网络技术,正在成为现代汽车电子系统中不可或缺的一部分。随着汽车网络的进一步演进和技术的不断创新,以太网在汽车行业的应用前景将会继续扩展和深化。
5.2、以太网在汽车中的具体应用
1. 车载以太网:
车载以太网技术是为了满足现代汽车复杂电子系统对高速数据传输和大数据量处理需求而引入的。它在各种应用中发挥着重要作用:
高级驾驶辅助系统(ADAS): ADAS系统依赖于多种传感器,如雷达、摄像头和激光雷达,来感知周围环境并进行实时决策。这些传感器产生大量的高分辨率数据,需要快速传输和处理。车载以太网能够提供足够的带宽和低延迟,支持ADAS系统实时的环境感知和数据融合,从而增强驾驶员辅助功能和安全性能。
自动驾驶数据的高带宽传输: 高级自动驾驶系统需要处理大量的传感器数据,并进行复杂的算法计算和决策。车载以太网通过其高速的数据传输能力,支持车辆内部各个子系统之间的大规模数据交换,如车辆控制、路径规划和环境模型构建,从而实现自动驾驶功能的可靠运行。
传感器类型 | 数据比特率范围 |
摄像头 | 500-3500 Mbps |
激光雷达 | 20-100 Mbps |
雷达 | 0.1-5 Mbps |
超声波 | 0.01 Mbps |
图中提供的表格列出了不同类型传感器的数据比特率范围,这些数据比特率是指传感器在传输数据时每秒传输的比特数。比特率越高,传感器能够传输的数据量越大,通常意味着更高的分辨率或更复杂的数据处理能力。如果一个系统需要集成多个高分辨率摄像头和激光雷达,那么就需要一个高带宽的网络,如汽车以太网,来满足这些传感器的数据传输需求。
2. 信息娱乐系统:
现代汽车的信息娱乐系统不仅包括音频和视频播放,还涉及到互联功能和后座娱乐系统,需要处理大量的多媒体数据:
高带宽的多媒体传输: 以太网提供的高速数据传输能力支持高清视频和高质量音频的流畅播放,以及复杂的互联功能,如在线地图更新、流媒体服务和远程互联设备的连接。这些功能不仅提升了乘客的娱乐体验,还增强了车辆的吸引力和市场竞争力。
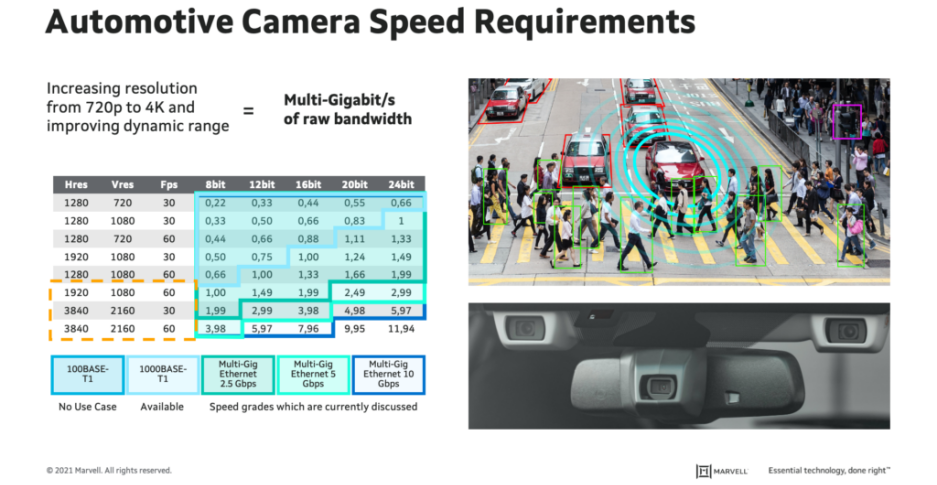
图中提供了汽车摄像头速度需求的数据,展示了随着分辨率从720p提高到4K,所需的原始带宽以多千兆比特每秒(Multi-Gigabit/s)增加。同时,图表还考虑了动态范围的改善,即色深(bit)从8位到24位的变化,以及不同的分辨率(水平分辨率Hres和垂直分辨率Vres)和帧(Fps)。
表格中列出了不同分辨率和帧率下,不同色深所需的比特率,以及对应的以太网速度等级(从100BASE-T1到Multi-Gig 10 Gbps)。以下是对图中表格的输出,包括分辨率、帧率、不同色深下的比特率,以及所需的以太网速度等级:
分辨率 | 帧率 | 8位色深比特率 | 12位色深比特率 | 16位色深比特率 | 20位色深比特率 | 24位色深比特率 | 以太网速度等级 |
1280x720 | 30 | 0.22 | 0.33 | 0.44 | 0.55 | 0.66 | 100BASE-T1 |
1280x720 | 60 | 0.44 | 0.66 | 0.88 | 1.11 | 1.33 | Multi-Gig 2.5 Gbps |
1920x1080 | 30 | 0.50 | 0.75 | 1.00 | 1.24 | 1.49 | Multi-Gig 5 Gbps |
1920x1080 | 60 | 1.00 | 1.49 | 1.99 | 2.49 | 2.99 | Multi-Gig 10 Gbps |
3840x2160 | 30 | 1.99 | 2.99 | 3.98 | 4.98 | 5.97 | - |
3840x2160 | 60 | 3.98 | 5.97 | 7.96 | 9.95 | 11.94 | - |
3. 车载诊断:
车载诊断系统是维护和管理现代汽车电子系统的重要工具,它需要高效的数据读取和精准的故障诊断:
高效的车辆数据读取和诊断: 以太网技术使得车辆的各种传感器和控制单元能够快速传输大量的诊断数据到诊断工具或者后台服务器。这些数据可以包括引擎和排放系统的传感器数据、电池管理系统的健康状态、车辆通信总线的实时状态等。通过高速的数据传输,诊断工程师能够更加精准地定位和解决车辆的故障,提高了维修效率和客户满意度。
总体来说,以太网技术作为一种高速、高效的数据通信协议,已经成为现代汽车电子系统中不可或缺的一部分。它不仅支持复杂的驾驶辅助系统和自动驾驶功能的实现,还提升了车辆信息娱乐系统的用户体验和车载诊断的效率。随着汽车技术的进步和消费者需求的增长,以太网在汽车领域的应用前景将继续扩展和深化。
5.3、以太网在汽车中的优势与限制
优势:
高带宽: 以太网技术支持非常高的数据传输速率,最高可达到100 Gbps。这种高带宽使得它能够处理大量的数据流,包括高清视频、音频和大容量的传感器数据,适用于复杂的汽车应用场景,如自动驾驶系统和车载娱乐系统。
多媒体传输能力强: 以太网不仅可以传输基本的数据包,还能支持高质量的多媒体数据传输,如高清视频和音频流。这使得汽车的信息娱乐系统能够提供优质的娱乐体验,包括视频流畅播放、在线音乐和互联功能等。
灵活性高: 以太网的灵活性使得它适用于多种网络拓扑结构和介质类型,如双绞线、光纤等。它支持不同的网络配置和连接方式,能够满足不同汽车厂商和系统集成商的需求。
限制:
实时性和确定性不足: 传统以太网在实时性和确定性方面存在挑战。在汽车应用中,特别是对于需要严格时间约束的控制和传感器数据交换,传统以太网的性能可能不足以满足要求。这可能导致数据包的延迟和抖动,影响系统的实时响应能力。
需专用的车载以太网技术: 为了解决传统以太网的实时性和确定性问题,汽车行业引入了专用的车载以太网技术,如音视频桥接(AVB,Audio Video Bridging)和时间敏感网络(TSN,Time-Sensitive Networking)。这些技术通过协议扩展和网络管理机制,提供了更精确的时间同步和优化的数据传输服务,以满足汽车系统对实时性能的高要求。
5.4、性能指标数值
最高带宽: 可达100 Gbps,尽管在汽车应用中实际使用的速率通常较低,但高带宽能够为未来的汽车电子系统提供足够的扩展性和性能储备。
总结来说,以太网作为一种高速、高带宽的网络技术,正在逐步渗透到汽车领域,其优势在于强大的多媒体传输能力和高灵活性。然而,传统以太网在实时性和确定性方面的限制促使汽车行业寻求特定的解决方案,以确保车辆系统的可靠性和响应速度。随着技术的进步和标准的完善,以太网在汽车领域的应用前景将会更加广阔和多样化。
#06
进行CAN、CAN FD、CAN XL和以太网协议的详细比较,包括数据速率、数据负载、应用场景、可靠性与实时性以及成本方面的分析。
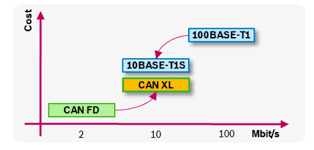
特征 / 协议 | CAN | CAN FD | CAN XL | 以太网 |
数据速率 | 最高1 Mbps | 最高8 Mbps | 目标10 Mbps或更高 | 最高100 Gbps |
数据负载 | 最多8字节 | 最多64字节 | 最多2048字节 | 多达1518字节 |
应用场景 | 传感器数据采集、车身控制、发动机管理 | 高速传感器数据、复杂控制指令 | 高速传感器融合、自动驾驶系统 | 多媒体传输、高带宽需求、车载娱乐 |
可靠性与实时性 | 高可靠性、实时性较好 | 较高数据速率下保持实时性 | 较高数据传输和更大数据帧 | 需通过AVB或TSN增强实时性 |
成本 | 低成本、广泛应用 | 适中成本、向下兼容 | 高端硬件成本较高、向下兼容 | 高带宽硬件较贵、需要特定网络设备 |
技术比较详细说明:
1. 数据速率:
CAN: 最高传输速率为1 Mbps,适合于低速率传感器数据采集和简单控制指令传输。
CAN FD: 提升到最高8 Mbps,支持更快速的数据传输,适合于高速传感器数据和复杂控制指令。
CAN XL: 目标为10 Mbps或更高,旨在处理高速传感器融合和复杂自动驾驶系统数据。
以太网: 提供最高达100 Gbps的数据传输速率,适合处理大规模多媒体数据和高带宽需求。
2. 数据负载:
CAN: 最大数据帧长度为8字节,适用于简单数据和控制指令的传输。
CAN FD: 最大数据帧长度扩展至64字节,支持更大数据负载的传输。
CAN XL: 最大数据帧长度可达2048字节,适合处理大块复杂数据,如高分辨率图像和视频。
以太网: 数据帧长度最大可达1518字节,支持大容量数据传输和多媒体流的处理。
3. 应用场景推荐:
CAN: 适用于传感器数据采集、车身控制、发动机管理等简单控制应用。
CAN FD: 适合需要高速传感器数据和复杂控制指令的应用场景,如先进驾驶辅助系统(ADAS)。
CAN XL: 为高速传感器融合和复杂自动驾驶系统提供支持,能够处理大规模数据。
以太网: 最适合于需要高带宽和大容量数据传输的应用,如车载娱乐系统、多媒体传输和车辆到云端服务的实时数据交换。
4. 可靠性与实时性:
CAN: 在低速率和简单网络环境下表现可靠,实时性较好。
CAN FD: 在保持向下兼容的同时提升了数据传输速率,实时性能受到一定影响。
CAN XL: 高速率和大数据帧提升了处理能力,但在实时性需求严格的场景下仍需特殊优化。
以太网: 需要通过AVB(Audio Video Bridging)或TSN(Time-Sensitive Networking)等技术增强实时性,以应对复杂的实时数据处理需求。
5. 成本:
CAN: 成本较低,广泛应用于现有的汽车电子系统中。
CAN FD: 中等成本,硬件升级较为适中,向下兼容性较好。
CAN XL: 高端硬件成本较高,需要针对性地升级现有系统以支持新的数据需求。
以太网: 硬件和设备成本较高,特别是需要处理高带宽需求和复杂数据流的场景。
结论:
根据具体应用需求和技术特性,选择适合的通信协议至关重要。CAN协议适合于低速率数据传输和简单控制应用,而CAN FD和CAN XL则更适合于需要更高速率和大数据负载的复杂应用。以太网则是处理高带宽和大容量数据的首选,尤其在车载娱乐系统和复杂的多媒体传输场景中表现突出。
这些比较和推荐有助于汽车制造商和系统集成商根据具体的技术需求和成本考量,选择最适合其应用场景的通信协议,从而优化汽车电子系统的性能和功能。
#07
未来汽车电子系统的发展将依赖于技术的创新和市场的需求变化:
技术创新驱动: 新技术如CAN XL和车载以太网的引入将推动汽车电子系统向更高性能和更智能化方向发展。
市场需求变化: 消费者对智能驾驶辅助功能和高级车载娱乐系统的需求增加,促使汽车制造商在通信协议选择上更加注重性能、可靠性和未来扩展性。
环境法规影响: 车辆安全和排放标准的提高,将进一步推动汽车电子系统对数据传输和处理能力的需求增加,从而对通信协议提出更高要求。
7.1、 汽车电子系统的发展方向
未来汽车电子系统将主要集中在智能化、网联化和自动化三个方面,这些趋势对通信协议提出了新的需求和挑战:
智能化需求: 智能汽车需要更多的传感器数据、高效的数据处理和智能决策能力。因此,通信协议需要支持更快速的数据传输和更大的数据负载,以应对复杂的数据处理需求。
网联化趋势: 车辆之间的通信(车到车通信,V2V)和车辆与基础设施的通信(车到基础设施通信,V2I)将成为实现智能交通和自动驾驶的关键。通信协议需要能够支持实时的车辆位置和状态信息交换,确保交通安全和效率。
自动化驱动: 自动驾驶技术的推广将大量依赖于精准的传感器数据和实时的决策反馈。通信协议需要具备高可靠性、低延迟和精确的实时性能,以支持自动驾驶系统的安全和可靠性。
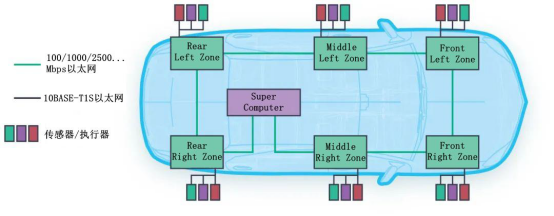
7.2、 新技术的融合:CAN XL和车载以太网
CAN XL和车载以太网代表了未来汽车电子通信领域的两大发展方向,它们有望在未来的汽车中得到融合和应用:
CAN XL的应用前景: CAN XL作为下一代CAN协议,旨在处理更高速率和更大数据帧的传输需求。具体性能指标包括:
◆最高数据速率: 目标为10 Mbps或更高。
◆最大数据帧长度: 可达2048字节,支持处理大块复杂数据,如高分辨率图像和视频。
CAN XL在自动驾驶系统、高速传感器数据融合以及复杂车辆控制系统中有着广泛的应用前景。


车载以太网的优势: 以太网在带宽和数据处理能力上的优势使得它适合处理高清视频、复杂的多媒体数据和大容量的传感器数据。未来,车载以太网有望在高级驾驶辅助系统(ADAS)和车载娱乐系统中发挥关键作用。具体性能指标包括:
◆最高数据速率: 可达100 Gbps。
◆最大数据帧长度: 多达1518字节,支持处理大容量数据和多媒体流。
7.3、 标准化与互操作性
随着汽车电子系统的复杂化和多样化,国际标准的制定和通信协议之间的互操作性变得尤为重要:
国际标准的制定: CAN、CAN FD、CAN XL和车载以太网等通信协议的标准化将推动行业技术的统一和发展。标准化能够确保不同厂商和系统组件之间的兼容性和一致性,降低系统集成和维护的成本。

协议之间的互操作性: 跨协议的互操作性将成为未来发展的重要趋势。例如,将CAN XL与车载以太网技术进行整合,以实现不同传感器和控制单元之间的无缝数据交换和协同工作。
综上所述,未来汽车电子系统的发展趋势将集中在智能化、网联化和自动化上,这些趋势将推动通信协议向更高性能、更大数据负载和更强互操作性的方向发展,以满足日益复杂的汽车应用需求。随着技术的不断演进和标准的完善,汽车电子系统将迎来更加丰富和创新的应用场景。
#08
根据目前的技术发展和市场趋势,各通信协议在汽车电子系统中有着不同的特点和应用优势。建议根据具体的汽车应用场景选择合适的通信协议,同时展望未来汽车通信协议的发展趋势及其对汽车行业的影响。
8.1、CAN 协议
特点和优势:
1.数据速率: 最高1 Mbps。
2.数据负载: 最多8字节。
3.应用优势:
适合于低速率的传感器数据采集和基本的车身控制。
高可靠性和实时性,广泛应用于传统的汽车电子系统中。
8.2、CAN FD 协议
特点和优势:
1.数据速率: 最高8 Mbps。
2.数据负载: 最多64字节。
3.应用优势:
支持更快速的数据传输,适合于需要高速传感器数据和复杂控制指令的应用。
向下兼容性好,可逐步替代传统的CAN协议,提升系统性能。
8.3、CAN XL 协议
特点和优势:
1.预期数据速率: 目标达到10 Mbps或更高。
2.数据负载: 最多2048字节。
3.应用优势:
适合处理高速传感器数据融合和复杂自动驾驶系统的大数据需求。
向下兼容现有的CAN协议,能够应对未来汽车电子系统的高性能要求。
8.4、车载以太网
特点和优势:
1.数据速率: 最高可达100 Gbps。
2.数据负载: 多达1518字节。
3.应用优势:
高带宽和大容量数据传输,适合处理复杂的多媒体数据、高清视频和大规模传感器数据。
在高级驾驶辅助系统(ADAS)、车载娱乐系统和车辆到云端服务等领域具有显著优势。
8.5、建议
根据不同的汽车应用场景,可以根据以下几点建议选择合适的通信协议:
传感器数据采集和基本控制: 对于低速率的传感器数据和基本的车身控制,如发动机控制单元(ECU)和车门锁控制,建议使用CAN协议。
高速传感器数据和复杂控制指令: 需要更快速数据传输和支持更大数据负载的应用,如高级驾驶辅助系统(ADAS),推荐使用CAN FD协议。
自动驾驶系统和大数据需求: 针对处理高速传感器数据融合和复杂自动驾驶系统数据的需求,未来可以考虑过渡到CAN XL协议。
多媒体数据传输和高带宽需求: 针对处理大量多媒体数据、高清视频和复杂的车载娱乐系统,推荐采用车载以太网技术。
8.6、展望未来
随着智能化、网联化和自动化趋势的推进,未来汽车通信协议将面临以下发展趋势和影响:
技术融合和协议演进:CAN XL和车载以太网等新技术的应用将进一步推动汽车电子系统向高性能和高可靠性方向发展。
标准化和互操作性: 国际标准的制定和通信协议之间的互操作性将成为发展的重要推动力,确保不同厂商和系统组件的兼容性和一致性。
市场应用扩展: 随着消费者需求的变化和新技术的应用,未来汽车电子系统将更加多样化和智能化,为驾驶员和乘客提供更安全、舒适和智能的出行体验。

综上所述,选择合适的通信协议对于优化汽车电子系统的性能和功能至关重要。随着技术的不断进步和市场需求的演变,未来汽车通信协议将不断演进和完善,以应对日益复杂和多样化的汽车应用需求。
参 考:
1.CAN-XL,下一代CAN网络(1)-嵌入式与网络计算湖南省重点实验室 (hnu.edu.cn)
2.About the CAN Protocol and How to Debug and Transmit CAN Communication - Total Phase
3.CAN Bus Protocol - 10 Minute Lesson - Chipkin
4.CAN-Bus System - Vernetzung einzelner Komponenten im Auto (mein-autolexikon.de)
5.CAN FD Explained: A Complete Tutorial for 2024 (autopi.io)
6.情报数据-佐思汽研 (shujubang.com)
7.(2) Basics of Switches and Transceivers in Automotive Ethernet | LinkedIn
8.Using Ethernet in automotive networks (techdesignforums.com)
9.CAN XL :CAN协议家族新成员_can canfd canxl-CSDN博客
10.What is automotive Ethernet and why is Marvell investing so heavily in it? - IoT Times (eetimes.com)
11.What's the Difference Between CAN Bus and Automotive Ethernet? | Electronic Design
12.Looking Ahead: High-Speed In-Vehicle Display and Sensor Connections - EE Times Asia (eetasia.com)
13.Back to the Future – Automotive network run at speed of 10Gbps - Marvell Blog | We’re Building the Future of Data Infrastructure
14.The Art of Networking (Series 4): CAN XL and 10BASE-T1S – Dataline Performance of Two New Actors in the Networking Arena | Renesas
15.盖世汽车 (gasgoo.com)
16.CAN_XL, CAN XL, CAN, Bosch_CAN, IP-modules | 博世半导体 (bosch-semiconductors.com)
17.10BASE以太网与CAN-XL对比-EDN 电子技术设计 (ednchina.com)
18.A CAN Protocol Overview: Basics And Benefits - NetBurner
19.Ultimate CAN Protocol Guide: Simply Explained [2024] (autopi.io)
20.一文搞懂CAN FD总线协议帧格式-腾讯云开发者社区-腾讯云 (tencent.com)
21.情报数据-佐思汽研 (shujubang.com)
22.CAN FD基础知识
23.The Art of Networking (Series 4): CAN XL and 10BASE-T1S – Dataline Performance of Two New Actors in the Networking Arena | Renesas
24.CAN XL :CAN协议家族新成员_can canfd canxl-CSDN博客
25.Using Ethernet in automotive networks (techdesignforums.com)
26.如何实现CAN与CANFD的总线桥接?_手机新浪网 (sina.cn)
/ END /
