前面我们UAC系列文章分享过MIC和SPK的案例,分别使用的是SOC自带的ADC采集音频,PDM或者PWM播放音频,这是比较低成本的方案,一般来说除非是专用的多媒体SOC,通用SOC自带的ADC等性能一般都不会很突出。在高性能要求时,一般会外置音频芯片来实现音频采集与播放。我们就以es8388为例来分享整个驱动过程。本文先介绍es8388的微控制器配置接口,实现寄存器的读写配置。
参考官方的两个文档,《ES8388 DS.pdf》和《ES8388 user Guide.pdf》。
ES8388支持SPI和IIC两种接口方式来进行配置,需要注意的是SPI只支持写,而IIC支持读写寄存器。一般来说会选择IIC因为支持读写,并且IIC也只需要2个引脚,而SPI需要3个引脚。但是如果对启动速度要求很严格则可以选择SPI方式,可以本地缓存寄存器内容的方式来解决只能写不能读的问题,因为ES8388支持SPI最大10M的速率,而IIC只支持最大400KHz的速率,使用SPI可以大大减少配置时间。所以对于驱动开发者来说,类似这些都是需要考虑的细节,并且也是需要有意识地主动去考虑的问题。
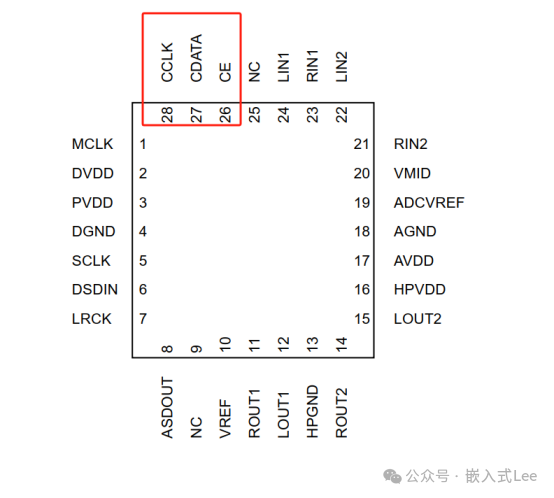
涉及到的引脚有CE,CCLK,CDATA,
SPI接口时,CE作为SPI_CSn,CCLK作为SPI_CLK,CDATA作为SPI_DIN(SPI_MOSI).
IIC接口时,CCLK作为SCL,CDATA作为SDA。
那么如何确定是使用SPI接口还是IIC接口呢,通过CE即可,如果CE固定为高或者低无需接控制器,则使用IIC,此时CE的电平代表IIC设备地址的最低位。
如果CE由高到低变化则表示使用SPI接口,此时CE需要接控制器。
ES8388作为从,CE高到低表示使用SPI接口,最大支持10M速率。
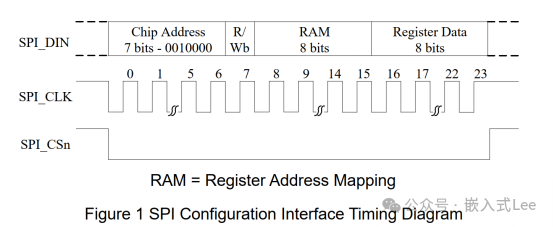
由于只有CDATA一个数据引脚即作为MOSI,所以只能写寄存器不能读寄存器。
SPI_CLK上升沿采样CDATA数据,高位在前。时序如下
CE作为SPI通讯开始,SPI_CLK上升沿采样,先发7位设备地址0x10(此时地址的最低位固定为0),然后是R/Wb位(0表示写,1表示读),然后是8位寄存器地址,最后是8位数据,也就是CE拉低的过程一次发完三个字节的数据。
CE固定为高或者为低,对应7位设备地址分别为0x10,0x11
高位在前,最大支持400kHz速率。
时序图如下
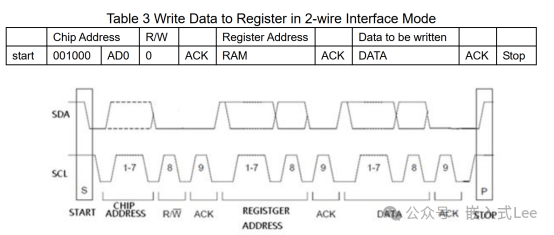
写寄存器,先发start,然后发7位设备地址+R/Wr位为0,ES8388回ACK
然后发寄存器地址,ES8388回ACK
再发寄存器值,ES8388回ACK
发STOP
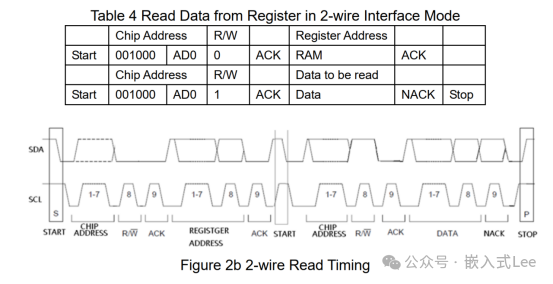
读寄存器,先发start,然后发7位设备地址+R/Wr位0,ES8388回ACK
然后发寄存器地址,ES8388回ACK
再发start,然后发7位设备地址+R/Wr位1,ES8388回ACK,
再读寄存器值,发NACK
发STOP
我们使用IIC方式,CE接高电平,所以7位设备地址是0x11. 前面我们已经分享了很多IO模拟IIC方式驱动各种IIC设备的案例。现在我们也可以设计既支持IO模拟IIC,也可以支持硬件IIC方式,通过宏区分,这样使用IO方式可以快速验证评估,后续再使用硬件IIC优化性能, 很多时候对性能要求没这么高使用IO模拟方式反而更灵活简单可靠。
由于前面已经分享了很多IO模拟IIC的驱动了,这里就直接上代码。
es8388_itf.c/es8388_itf.h:需要用户实现es8388.c需要的接口es8388_write_reg,es8388_read_reg,ES8388_LOG,
以及其他初始化过程等, 也可以进一步封装,对外提供es8388操作的接口。
io_iic.c,io_iic.h:IO模拟IIC的实现,完全可移植,无需任何修改,如果es8388_itf.h中定义宏#define USE_IO_IIC 1则使用IO模拟IIC的方式,使用该部分实现,否则使用硬件IIC。
Io_iic.c
#include "io_iic.h"/*** _______________________* SCL ____________| |__* ————————————————————————* SDA |______________* (1) (2) (4) (6)* (3) (5)* 其中(3) SDA低建立时间 (5) SDA高保持时间* (1) 拉高SDA (4)拉高SDA产生上升沿* (2) SCL拉高 SCL高时SDA上升沿即停止信号*/void io_iic_start(io_iic_dev_st* dev){/* SCL高时,SDA下降沿 */dev->sda_write(1); /* (1) SDA拉高以便后面产生下降沿 */dev->scl_write(1); /* (2) 拉高SCL */if(dev->delay_pf != 0) /* (3) SCL高保持*/{dev->delay_pf(dev->delayus);}dev->sda_write(0); /* (4)SCL高时SDA下降沿 启动 */if(dev->delay_pf != 0) /* (5)SCL高保持 */{dev->delay_pf(dev->delayus);}dev->scl_write(0); /* (6)SCL恢复 */}/*** _______________________* SCL ____________| |____* ————————————————* SDA ————————————————————————|* (1) (2) (4) (6)* (3) (5)* 其中(3) SDA低建立时间 (5) SDA高保持时间* (1) 拉低SDA (4)拉高SDA产生上升沿* (2) SCL拉高 SCL高时SDA上升沿即停止信号*/void io_iic_stop(io_iic_dev_st* dev){/* SCL高时,SDA上升沿 */dev->sda_write(0); /* (1)SDA先输出低以便产生上升沿 */dev->scl_write(1); /* (2)SCL高 */if(dev->delay_pf != 0) /* (3)SCL高保持 */{dev->delay_pf(dev->delayus);}dev->sda_write(1); /* (4)SCL高时SDA上升沿 停止 */if(dev->delay_pf != 0) /* (5)SCL高保持 */{dev->delay_pf(dev->delayus);}dev->scl_write(0); /* (6)SCL恢复 */}/*** | B0 | B1~B6| B7 | NACK/ACK |* ___________ _ __________ ____________* ____________| | x |__________| |____________| |* (1)[2] (4) (6)[7] (9)[10] (12)* (3) (5) (8) (11)* 其中(1)(6)(12)拉低SCL;(4)(9)拉高SCL;* [2]输出 [7]转为读 [10]读ACK;* (3)(8)低保持时间,(5)(11)高保持时间。*/int io_iic_write(io_iic_dev_st* dev, uint8_t val){uint8_t tmp = val;uint8_t ack = 0;if(dev == 0){return -1;}if((dev->scl_write == 0) || (dev->sda_write == 0) || (dev->sda_read == 0) || (dev->sda_2read == 0)){return -1;}/* SCL下降沿后准备数据,对方上升沿采集数据,高位在前 */for(uint8_t i=0; i<8; i++){dev->scl_write(0); /* (1) SCL拉低以便修改数据 */if((tmp & 0x80) != 0) /* [2] 准备SDA数据 */{dev->sda_write(1);}else{dev->sda_write(0);}if(dev->delay_pf != 0){dev->delay_pf(dev->delayus); /* (3) SCL拉低时间即数据建立时间 */}dev->scl_write(1); /*(4) SCL上升沿对方采样 */if(dev->delay_pf != 0){dev->delay_pf(dev->delayus); /* (5) SCL高保持时间,数据保持时间 */}tmp <<= 1; /* 处理下一位 */}dev->scl_write(0); /* (6)SCL归0 完成8个CLK */dev->sda_2read(); /* [7]SDA转为读 */if(dev->delay_pf != 0){dev->delay_pf(dev->delayus); /* (8)第九个时钟拉低时间 */}dev->scl_write(1); /* (9)SCL上升沿 */ack = dev->sda_read(); /* [10]上升沿后读 */if(dev->delay_pf != 0){dev->delay_pf(dev->delayus); /* (11)第九个时钟高保持 */}dev->scl_write(0); /* (12)恢复SCL到低 */return (ack==0) ? 0 : -1;}/*** | B0 | B1~B6| B7 | NACK/ACK |* ___________ _ __________ ____________* ____________| | x |__________| |____________| |* (1)[2] (4)[5] (7)[8] (10) (12)* (3) (6) (9) (11)* 其中(1)(7)(12)拉低SCL;(4)(10)拉高SCL;* [2]转为读 [5]读 [8]输出ACK;* (3)(9)低保持时间,(6)(11)高保持时间。*/int io_iic_read(io_iic_dev_st* dev, uint8_t* val, uint8_t ack){uint8_t tmp = 0;if((dev == 0) || (val == 0)){return -1;}if((dev->scl_write == 0) || (dev->sda_write == 0) || (dev->sda_read == 0) || (dev->sda_2read == 0)){return -1;}/* SCL下降沿后对方准备数据,上升沿读数据,高位在前 */for(uint8_t i=0; i<8; i++){tmp <<= 1; /* 处理下一位,先移动后读取 */dev->scl_write(0); /* (1) */dev->sda_2read(); /* [2]转为读输入高阻,以便对方能输出 */if(dev->delay_pf != 0){dev->delay_pf(dev->delayus);/* (3)SCL低保持时间 */}dev->scl_write(1); /* (4)SCL上升沿 */if(dev->sda_read()) /* (5)读数据(SCL低时对方已经准备好数据) */{tmp |= 0x01; /* 高位在前,最后左移到高位 */}if(dev->delay_pf != 0){dev->delay_pf(dev->delayus);/* (6)SCL高保持时间 */}}dev->scl_write(0); /* (7)恢复SCL时钟为低 */dev->sda_write(ack); /* [8]准备ACK信号(SCL低才能更行SDL) */if(dev->delay_pf != 0){dev->delay_pf(dev->delayus); /* (9)第九个SCL拉低时间 */}dev->scl_write(1); /* (10)SCL上升沿发数据触发对方读 */if(dev->delay_pf != 0){dev->delay_pf(dev->delayus); /* (11)第九个SCL拉高保持时间 */}dev->scl_write(0); /* (12)第九个SCL完成恢复低 *///dev->sda_write(1); /* 这里无需驱动SDA,后面可能还是读),需要发送时再驱动 */*val = tmp;return 0;}void io_iic_init(io_iic_dev_st* dev){if((dev != 0) && (dev->init != 0)){dev->init();}}void io_iic_deinit(io_iic_dev_st* dev){if((dev != 0) && (dev->deinit != 0)){dev->deinit();}}
Io_iic.h
extern "C"{typedef void (*io_iic_scl_write_pf)(uint8_t val); /**< SCL写接口 */typedef void (*io_iic_sda_write_pf)(uint8_t val); /**< SDA写接口 */typedef void (*io_iic_sda_2read_pf)(void); /**< SDA转为读接口 */typedef uint8_t (*io_iic_sda_read_pf)(void); /**< SDA读接口 */typedef void (*io_iic_delay_us_pf)(uint32_t delay); /**< 延时接口 */typedef void (*io_iic_init_pf)(void); /**< 初始化接口 */typedef void (*io_iic_deinit_pf)(void); /**< 解除初始化接口 *//*** \struct io_iic_dev_st* 接口结构体*/typedef struct{io_iic_scl_write_pf scl_write; /**< scl写接口 */io_iic_sda_write_pf sda_write; /**< sda写接口 */io_iic_sda_2read_pf sda_2read; /**< sda转为读接口 */io_iic_sda_read_pf sda_read; /**< sda读接口 */io_iic_delay_us_pf delay_pf; /**< 延时接口 */io_iic_init_pf init; /**< 初始化接口 */io_iic_deinit_pf deinit; /**< 解除初始化接口 */uint32_t delayus; /**< 延迟时间 */} io_iic_dev_st;/*** \fn io_iic_start* 发送启动信号* \param[in] dev \ref io_iic_dev_st*/void io_iic_start(io_iic_dev_st* dev);/*** \fn io_iic_stop* 发送停止信号* \param[in] dev \ref io_iic_dev_st*/void io_iic_stop(io_iic_dev_st* dev);/*** \fn io_iic_write* 写一个字节* \param[in] dev \ref io_iic_dev_st* \param[in] val 待写入的值* \retval 0 写成功(收到了ACK)* \retval -2 写失败(未收到ACK)* \retval -1 参数错误*/int io_iic_write(io_iic_dev_st* dev, uint8_t val);/*** \fn io_iic_read* 读一个字节* \param[in] dev \ref io_iic_dev_st* \param[out] val 存储读到的值* \param[in] ack 1发送NACK 0发送ACK* \retval 0 读成功* \retval -1 参数错误*/int io_iic_read(io_iic_dev_st* dev, uint8_t* val, uint8_t ack);/*** \fn io_iic_init* 初始化* \param[in] dev \ref io_iic_dev_st*/void io_iic_init(io_iic_dev_st* dev);/*** \fn io_iic_deinit* 解除初始化* \param[in] dev \ref io_iic_dev_st*/void io_iic_deinit(io_iic_dev_st* dev);}
Es8388_itf.c
static int es8388_init_flag = 0;/* IIC IO操作的移植 */static void io_iic_scl_write_port(uint8_t val){if(val){gpio_write(ES8388_IIC_SCL_PIN, 1);}else{gpio_write(ES8388_IIC_SCL_PIN, 0);}}static void io_iic_sda_write_port(uint8_t val){gpio_setdirection(ES8388_IIC_SDA_PIN, GPIO_DIRECTION_OUTPUT);if(val){gpio_write(ES8388_IIC_SDA_PIN, 1);}else{gpio_write(ES8388_IIC_SDA_PIN, 0);}}static void io_iic_sda_2read_port(void){gpio_setdirection(ES8388_IIC_SDA_PIN, GPIO_DIRECTION_INPUT);}static uint8_t io_iic_sda_read_port(void){if(0 == gpio_read(ES8388_IIC_SDA_PIN)){return 0;}else{return 1;}}static void io_iic_delay_us_port(uint32_t delay){uint32_t volatile t=delay;while(t--);}static void io_iic_init_port(void){gpio_open(ES8388_IIC_SCL_PIN, GPIO_DIRECTION_OUTPUT);gpio_open(ES8388_IIC_SDA_PIN, GPIO_DIRECTION_OUTPUT);gpio_set_pull_mode(ES8388_IIC_SCL_PIN,GPIO_PULL_UP);gpio_set_pull_mode(ES8388_IIC_SDA_PIN,GPIO_PULL_UP);gpio_write(ES8388_IIC_SCL_PIN, 0);gpio_write(ES8388_IIC_SDA_PIN, 0);}static void io_iic_deinit_port(void){gpio_close(ES8388_IIC_SCL_PIN);gpio_close(ES8388_IIC_SDA_PIN);}static io_iic_dev_st iic_dev={.scl_write = io_iic_scl_write_port,.sda_write = io_iic_sda_write_port,.sda_2read = io_iic_sda_2read_port,.sda_read = io_iic_sda_read_port,.delay_pf = io_iic_delay_us_port,.init = io_iic_init_port,.deinit = io_iic_deinit_port,.delayus = 5,};int es8388_itf_init(void){if(es8388_init_flag != 0){return 0;}es8388_init_flag = 0;io_iic_init(&iic_dev);i2c_gpio_cfg_t gpio_cfg;gpio_cfg.scl = ES8388_IIC_SCL_PIN;gpio_cfg.sda = ES8388_IIC_SDA_PIN;i2c_config_t iic_cfg;iic_cfg.baudrate = 50000;iic_cfg.i2c_busrt_mode = 0;iic_cfg.wait_nack_max_time = 10;gpio_set_pull_mode(ES8388_IIC_SCL_PIN,GPIO_PULL_UP);gpio_set_pull_mode(ES8388_IIC_SDA_PIN,GPIO_PULL_UP);i2c_init(ES8388_IIC_PORT, &iic_cfg);i2c_open(ES8388_IIC_PORT, &gpio_cfg);es8388_dump_allregs();/* 读写寄存器测试 *///while(0){uint8_t val=0;es8388_read_reg((uint8_t)8, &val);val |= 0x20;es8388_write_reg((uint8_t)8, val);val = 0;es8388_read_reg((uint8_t)8, &val);ES8388_LOG(("set reg 8 to %x\n",val));val &= ~0x20;es8388_write_reg((uint8_t)8, val);val = 0;es8388_read_reg((uint8_t)8, &val);ES8388_LOG(("set reg 8 to %x\n",val));}es8388_dump_allregs();return 0;}int es8388_itf_deinit(void){io_iic_deinit(&iic_dev);i2c_close(ES8388_IIC_PORT);i2c_deinit(ES8388_IIC_PORT);return 0;}int es8388_write_reg(uint8_t reg, uint8_t val){/* 启动 */io_iic_start(&iic_dev);/* 发送写地址 */if(0 != io_iic_write(&iic_dev,ES8388_IIC_DEV_ADDR<<1)){io_iic_stop(&iic_dev);return -1;}/* 寄存器地址 */if(0 != io_iic_write(&iic_dev,reg)){io_iic_stop(&iic_dev);return -2;}/* 写数据 */if(0 != io_iic_write(&iic_dev,val)){io_iic_stop(&iic_dev);return -2;}/* 结束 */io_iic_stop(&iic_dev);return 0;uint8_t tx_buf[1];tx_buf[0] = val;int ret = i2c_master_transmit(ES8388_IIC_PORT, ES8388_IIC_DEV_ADDR, reg, I2C_MEMORY_ADDR_8BIT,tx_buf, 1, 1000);if(ret != RET_OK){ES8388_LOG(("es8388 iic write reg %d err %d\n", ES8388_IIC_PORT, reg, ret));}return ret;}int es8388_read_reg(uint8_t reg, uint8_t* val){/* 启动 */io_iic_start(&iic_dev);/* 发送写地址 */if(0 != io_iic_write(&iic_dev,ES8388_IIC_DEV_ADDR<<1)){io_iic_stop(&iic_dev);return -1;}/* 寄存器地址 */if(0 != io_iic_write(&iic_dev,reg)){io_iic_stop(&iic_dev);return -2;}/* 重新启动 */io_iic_start(&iic_dev);/* 发送读地址 */if(0 != io_iic_write(&iic_dev,(ES8388_IIC_DEV_ADDR<<1) | 0x01)){io_iic_stop(&iic_dev);return -1;}/* 读数据 */if(0 != io_iic_read(&iic_dev,val,1)){io_iic_stop(&iic_dev);return -2;}/* 结束 */io_iic_stop(&iic_dev);return 0;uint8_t rx_buffer[1];int ret = i2c_master_receive_from_memory_poll(ES8388_IIC_PORT, ES8388_IIC_DEV_ADDR, reg, I2C_MEMORY_ADDR_8BIT,rx_buffer, 1, 1000);*val = rx_buffer[0];if(ret != RET_OK){ES8388_LOG(("es8388 iic read reg %d err %d\n", reg, ret));}return ret;}int es8388_dump_allregs(void){uint8_t regval;for(int i=0; i<53; i++){if(0 != es8388_read_reg(i,®val)){return -1;}ES8388_LOG(("REG%02d:0x%x\r\n",i,regval));}return 0;}
Es8388_itf.h
extern "C"{int es8388_itf_init(void);int es8388_itf_deinit(void);int es8388_write_reg(uint8_t reg, uint8_t val);int es8388_read_reg(uint8_t reg, uint8_t* val);int es8388_dump_allregs(void)#ifdef __cplusplus}#endif#endif
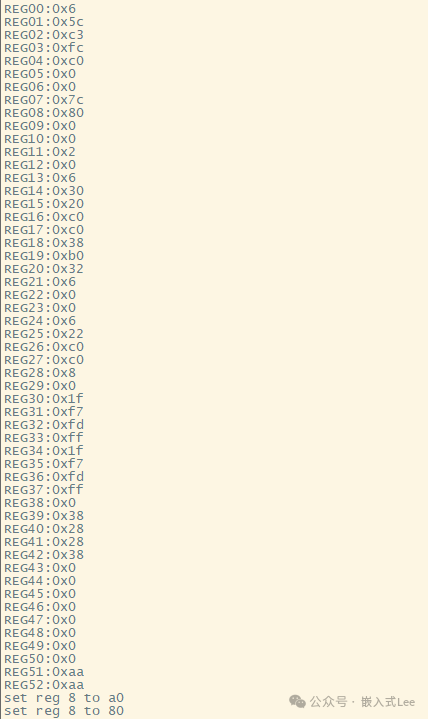
测试寄存器的读写和打印所有寄存器默认值如下,可以看到读写8寄存器正确,打印的寄存器默认值和手册对应。
REG00:0x6
REG01:0x5c
REG02:0xc3
REG03:0xfc
REG04:0xc0
REG05:0x0
REG06:0x0
REG07:0x7c
REG08:0x80
REG09:0x0
REG10:0x0
REG11:0x2
REG12:0x0
REG13:0x6
REG14:0x30
REG15:0x20
REG16:0xc0
REG17:0xc0
REG18:0x38
REG19:0xb0
REG20:0x32
REG21:0x6
REG22:0x0
REG23:0x0
REG24:0x6
REG25:0x22
REG26:0xc0
REG27:0xc0
REG28:0x8
REG29:0x0
REG30:0x1f
REG31:0xf7
REG32:0xfd
REG33:0xff
REG34:0x1f
REG35:0xf7
REG36:0xfd
REG37:0xff
REG38:0x0
REG39:0x38
REG40:0x28
REG41:0x28
REG42:0x38
REG43:0x0
REG44:0x0
REG45:0x0
REG46:0x0
REG47:0x0
REG48:0x0
REG49:0x0
REG50:0x0
REG51:0xaa
REG52:0xaa
set reg 8 to a0
set reg 8 to 80
进行IIC读写寄存器调试时,只需要ES8388上电,IIC接口即可工作即可读写寄存器,无需提供MCLK时钟。所以如果不通,只需要检查DVDD,PVDD,DGND,这几个电源引脚,以及CE的电平确认设备地址是0x11还是0x10。 使用示波器确认IIC接口信号,逻辑分析仪抓取IIC信号解析即可。
至此我们的IO模拟IIC的代码已经应用在了各种IIC接口设备的驱动,非常方便简单好用,现在也可以看到自己造一个好用的轮子是一件多值得的事了。
