
----追光逐电 光赢未来----
01 前言
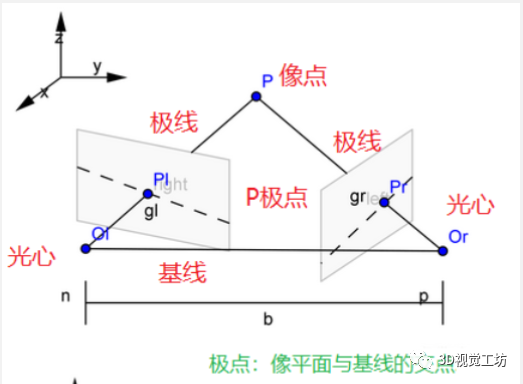
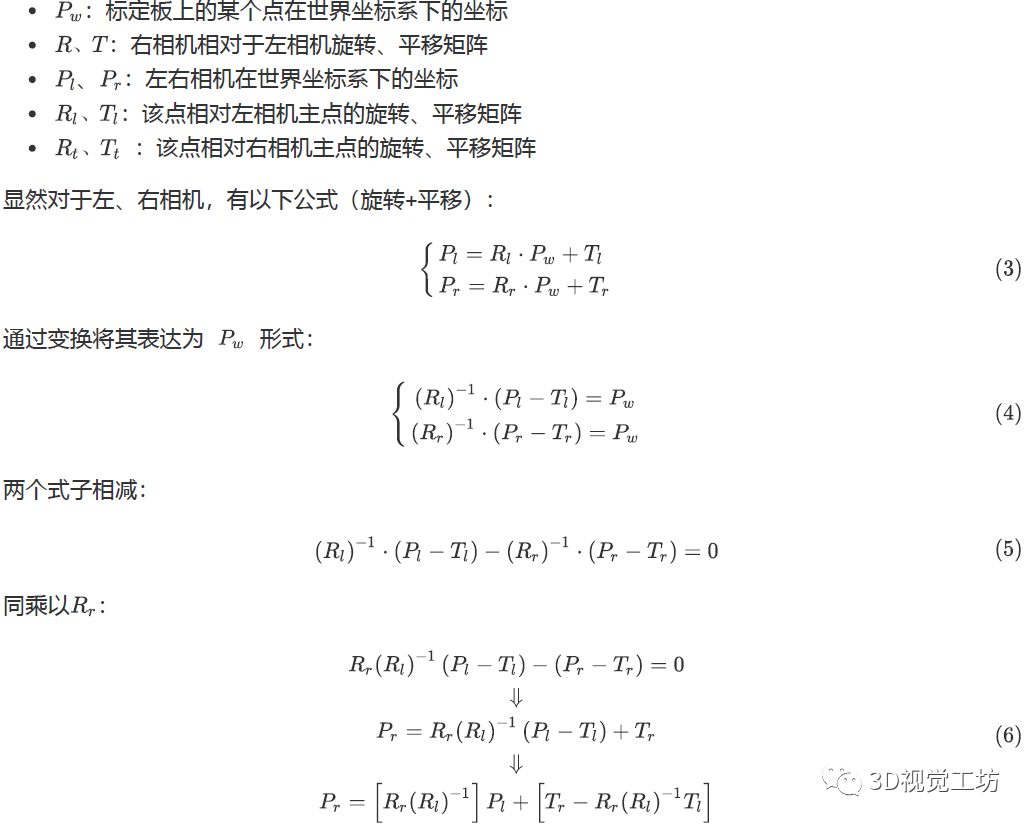
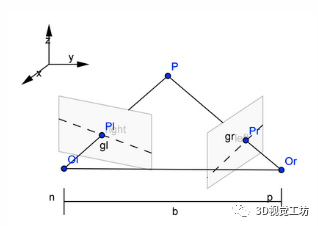
这是因为在许多三维重建算法中,我们都要知道两台相机之间的相对位置关系,这样才能进行距离计算。


注:可以看出来,最重要的,我们要知道右相机相对于左相机的位姿关系,那我们才可以做校正!


 | 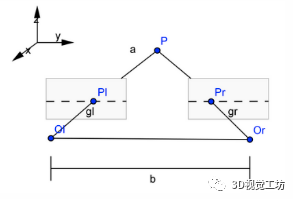 |
Bouguet极线校正方法:左右相机成像平面各旋转一半,使得左右图像重投影造成的误差最小,左右视图的共同面积最大。
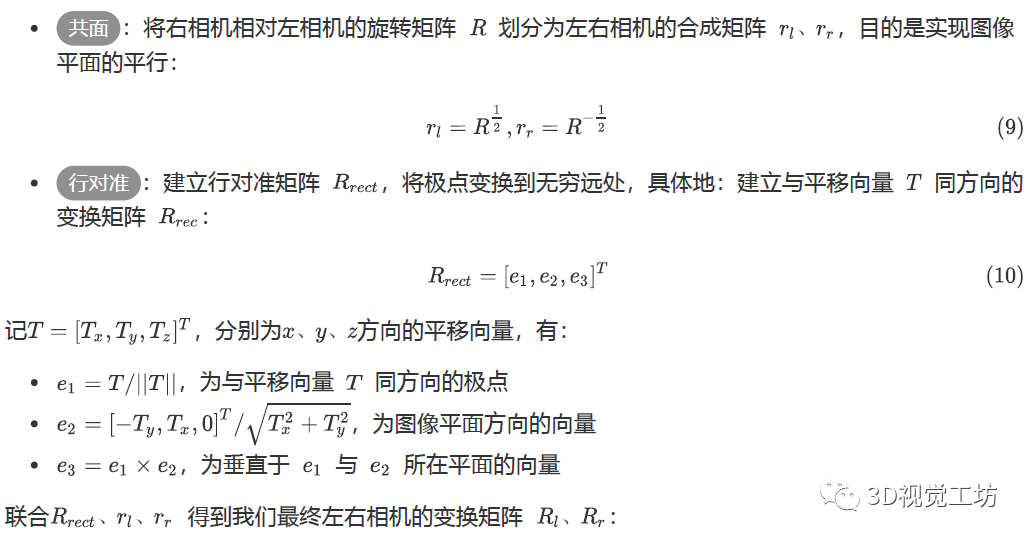

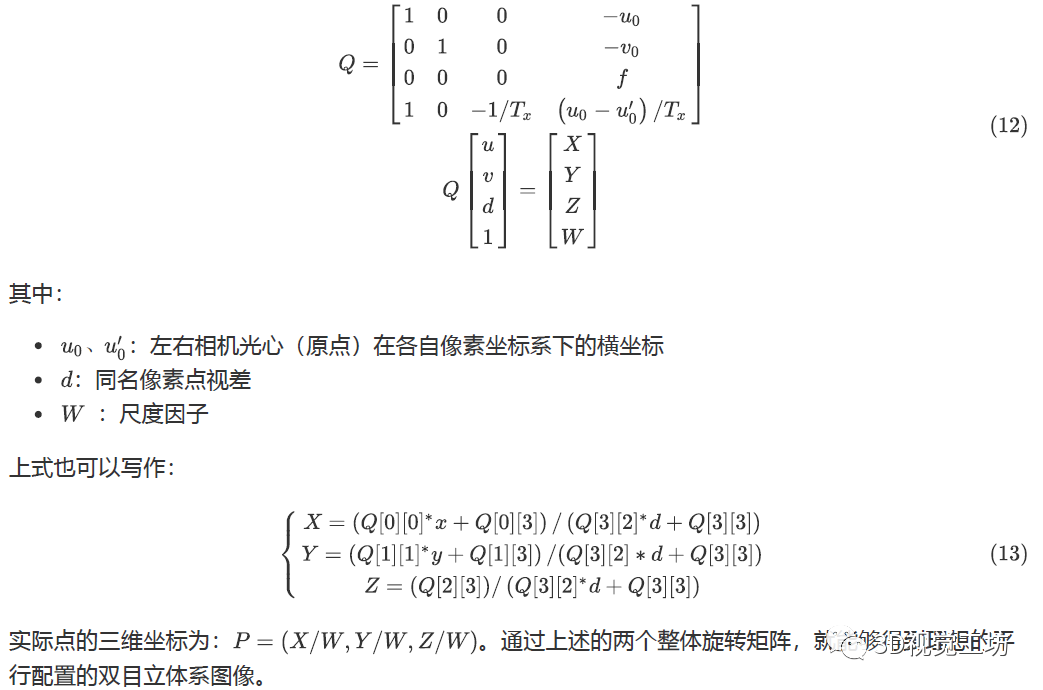
得到这两个变换矩阵,左、右相机分别乘以这两个矩阵即可完成变换,其中已经包含了平移信息!
 |

申明:感谢原创作者的辛勤付出。本号转载的文章均会在文中注明,若遇到版权问题请联系我们处理。

----与智者为伍 为创新赋能----

联系邮箱:uestcwxd@126.com
QQ:493826566


