点击上方「嵌入式大杂烩」,选择「置顶公众号」第一时间查看嵌入式笔记!

来源:https://blog.csdn.net/songdawww
《论语》有云:“工欲善其事,必先利其器”。输出调试信息是软件开发中必不可少的调试利器,在出现bug时如果没有调试信息将会是一件令人头痛的事。本文主要介绍在嵌入式开发中用来输出log的方法,这些方法都是在实际开发过程中使用过的。
嵌入式开发的一个特点是很多时候没有操作系统,或者没有文件系统,常规的打印log到文件的方法基本不适用。最常用的是通过串口输出uart log,例如51单片机,只要实现串口驱动,然后通过串口输出就可以了。
这种方法实现简单,大部分嵌入式芯片都有串口功能。但是这样简单的功能有时候却不是那么好用,比如:
(1) 一款新拿到的芯片,没有串口驱动时如何打印log
(2) 某些应用下对时序要求比较高,串口输出log占用时间太长怎么办?比如usb枚举。
(3) 某些bug正常运行时会出现,当打开串口log时又不再复现怎么办
(4) 一些封装中没有串口,或者串口已经被用作其他用途,要如何输出log 下面来讨论这些问题:
准确来说这里并不是输出log,而是以一种方式不使用串口就可以看到log。在芯片开发阶段都可以连接仿真器调试,可以使用打断点的方法调试,但是有些操作如果不能被打断就没法使用断点调试了。
这时候可以考虑将log打印到SRAM中,整个操作结束后再通过仿真器查看SRAM中的log buffer,这样就实现了间接的log输出。
本文使用的测试平台是stm32f407 discovery,基于usb host实验代码,对于其他嵌入式平台原理也是通用的。首先定义一个结构体用于打印log,如下:
typedef struct
{
volatile u8 type;
u8* buffer; /* log buffer指针*/
volatile u32 write_idx; /* log写入位置*/
volatile u32 read_idx; /* log 读取位置*/
}log_dev;
定义一段SRAM空间作为log buffer:
static u8 log_buffer[LOG_MAX_LEN];
log buffer是环形缓冲区,在小的buffer就可以无限打印log,缺点也很明显,如果log没有及时输出就会被新的覆盖。Buffer大小根据SRAM大小分配,这里使用1kB。为了方便输出参数,使用printf函数来格式化输出,需要做如下配置(Keil):
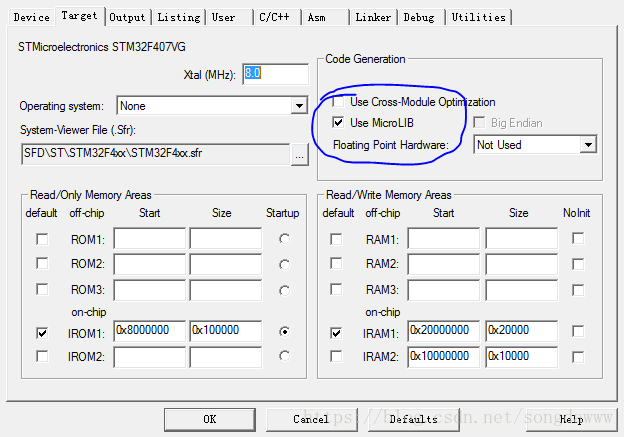
并包含头文件#include , 在代码中实现函数fputc():
//redirect fputc
int fputc(int ch, FILE *f)
{
print_ch((u8)ch);
return ch;
}
写入数据到Sram:
/*write log to bufffer or I/O*/
void print_ch(u8 ch)
{
log_dev_ptr->buffer[log_dev_ptr->write_idx++] = ch;
if(log_dev_ptr->write_idx >= LOG_MAX_LEN){
log_dev_ptr->write_idx = 0;
}
}
为了方便控制log打印格式,在头文件中再添加自定义的打印函数
#ifdef DEBUG_LOG_EN
#define DEBUG(...) printf("usb_printer:"__VA_ARGS__)
#else
#define DEBUG(...)
#endif
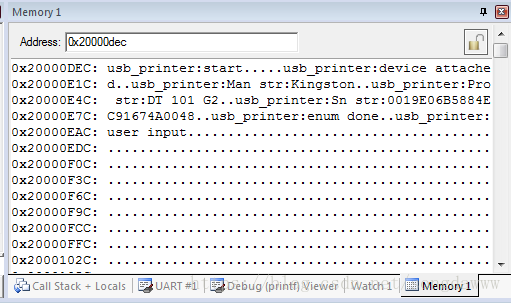
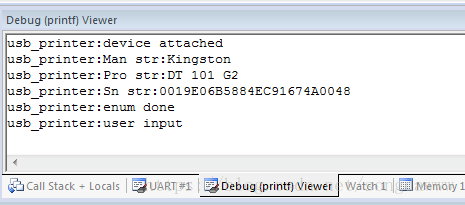
在需要打印log的地方直接调用DEBUG()即可,最终效果如下,从Memory窗口可以看到打印的log:
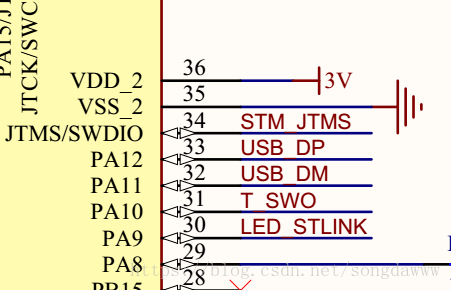
通过打印log到SRAM的方式可以看到log,但是数据量多的时候可能来不及查看就被覆盖了。为了解决这个问题,可以使用St-link的SWO输出log,这样就不用担心log被覆盖。查看原理图f407 discovery的SWO已经连接了,否则需要自己飞线连接:
在log结构体中添加SWO的操作函数集:
typedef struct
{
u8 (*init)(void* arg);
u8 (*print)(u8 ch);
u8 (*print_dma)(u8* buffer, u32 len);
}log_func;
typedef struct
{
volatile u8 type;
u8* buffer;
volatile u32 write_idx;
volatile u32 read_idx;
//SWO
log_func* swo_log_func;
}log_dev;
SWO只需要print操作函数,实现如下:
u8 swo_print_ch(u8 ch)
{
ITM_SendChar(ch);
return 0;
}
使用SWO输出log同样先输出到log buffer,然后在系统空闲时再输出,当然也可以直接输出。log延迟输出会影响log的实时性,而直接输出会影响到对时间敏感的代码运行,所以如何取舍取决于需要输出log的情形。
在while循环中调用output_ch()函数,就可以实现在系统空闲时输出log。
/*output log buffer to I/O*/
void output_ch(void)
{
u8 ch;
volatile u32 tmp_write,tmp_read;
tmp_write = log_dev_ptr->write_idx;
tmp_read = log_dev_ptr->read_idx;
if(tmp_write != tmp_read)
{
ch = log_dev_ptr->buffer[tmp_read++];
//swo
if(log_dev_ptr->swo_log_func)
log_dev_ptr->swo_log_func->print(ch);
if(tmp_read >= LOG_MAX_LEN)
{
log_dev_ptr->read_idx = 0;
}
else
{
log_dev_ptr->read_idx = tmp_read;
}
}
}
使用IDE中SWO输出功能需要做如下配置(Keil):
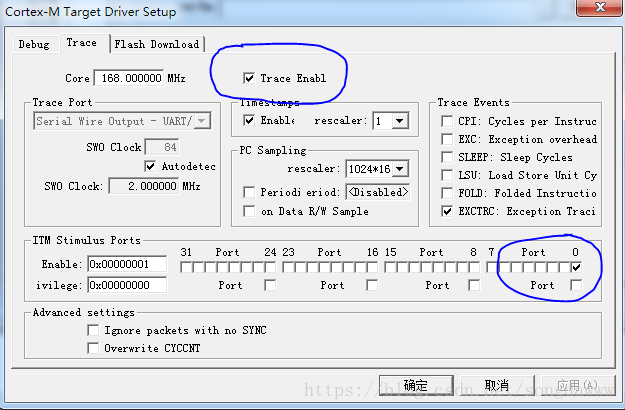
在窗口可以看到输出的log:
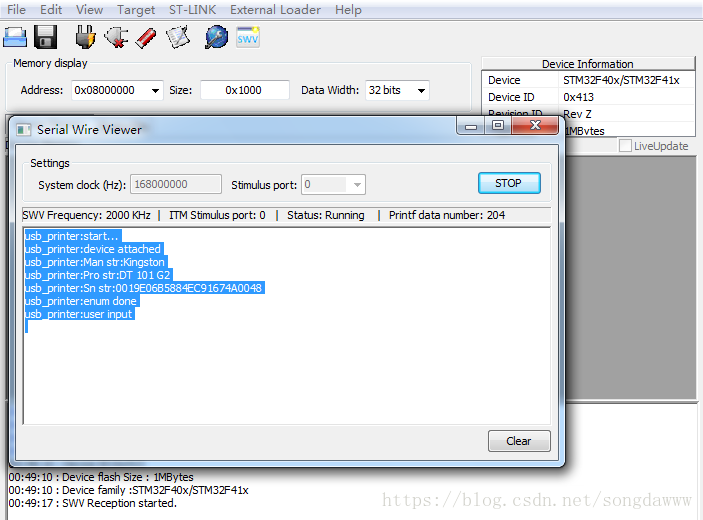
使用STM32 ST-LINK Utility不需要做特别的设置,直接打开ST-LINK菜单下的Printf via SWO viewer,然后按start:
以上都是在串口log暂时无法使用,或者只是临时用一下的方法,而适合长期使用的还是需要通过串口输出log,毕竟大部分时候没法连接仿真器。添加串口输出log只需要添加串口的操作函数集即可:
typedef struct
{
volatile u8 type;
u8* buffer;
volatile u32 write_idx;
volatile u32 read_idx;
volatile u32 dma_read_idx;
//uart
log_func* uart_log_func;
//SWO
log_func* swo_log_func;
}log_dev;
实现串口驱动函数:
log_func uart_log_func =
{
uart_log_init,
uart_print_ch,
0,
};
添加串口输出log与通过SWO过程类似,不再多叙述。而下面要讨论的问题是,串口的速率较低,输出数据需要较长时间,严重影响系统运行。
虽然可以通过先打印到SRAM再延时输出的办法来减轻影响,但是如果系统中断频繁,或者需要做耗时运算,则可能会丢失log。要解决这个问题,就是要解决CPU与输出数据到串口同时进行的问题,嵌入式工程师立马可以想到DMA正是好的解决途径。
使用DMA搬运log数据到串口输出,同时又不影响CPU运行,这样就可以解决输出串口log耗时影响系统的问题。串口及DMA初始化函数如下:
u8 uart_log_init(void* arg)
{
DMA_InitTypeDef DMA_InitStructure;
u32* bound = (u32*)arg;
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);//使能USART2时钟
//串口2对应引脚复用映射
GPIO_PinAFConfig(GPIOA,GPIO_PinSource2,GPIO_AF_USART2);
//USART2端口配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure);
//USART2初始化设置
USART_InitStructure.USART_BaudRate = *bound;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Tx; //收发模式
USART_Init(USART2, &USART_InitStructure); //初始化串口1
#ifdef LOG_UART_DMA_EN
USART_DMACmd(USART2,USART_DMAReq_Tx,ENABLE);
#endif
USART_Cmd(USART2, ENABLE); //使能串口1
USART_ClearFlag(USART2, USART_FLAG_TC);
while (USART_GetFlagStatus(USART2, USART_FLAG_TC) == RESET);
#ifdef LOG_UART_DMA_EN
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_DMA1, ENABLE);
//Config DMA channel, uart2 TX usb DMA1 Stream6 Channel
DMA_DeInit(DMA1_Stream6);
DMA_InitStructure.DMA_Channel = DMA_Channel_4;
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)(&USART2->DR);
DMA_InitStructure.DMA_DIR = DMA_DIR_MemoryToPeripheral;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_MemoryDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_FIFOMode = DMA_FIFOMode_Disable;
DMA_InitStructure.DMA_MemoryBurst = DMA_MemoryBurst_Single;
DMA_InitStructure.DMA_PeripheralBurst = DMA_PeripheralBurst_Single;
DMA_Init(DMA1_Stream6, &DMA_InitStructure);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_DMA1, ENABLE);
#endif
return 0;
}
DMA输出到串口的函数如下:
u8 uart_print_dma(u8* buffer, u32 len)
{
if((DMA1_Stream6->CR & DMA_SxCR_EN) != RESET)
{
//dma not ready
return 1;
}
if(DMA_GetFlagStatus(DMA1_Stream6,DMA_IT_TCIF6) != RESET)
{
DMA_ClearFlag(DMA1_Stream6,DMA_FLAG_TCIF6);
DMA_Cmd(DMA1_Stream6,DISABLE);
}
DMA_SetCurrDataCounter(DMA1_Stream6,len);
DMA_MemoryTargetConfig(DMA1_Stream6, (u32)buffer, DMA_Memory_0);
DMA_Cmd(DMA1_Stream6,ENABLE);
return 0;
}
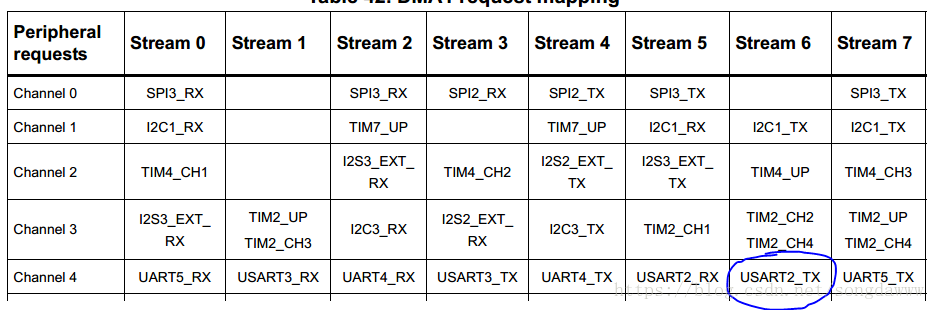
这里为了方便直接使用了查询DMA状态寄存器,有需要可以修改为DMA中断方式,查Datasheet可以找到串口2使用DMA1 channel4的stream6:
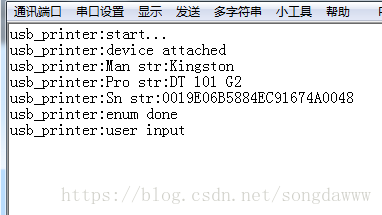
最后在PC端串口助手可以看到log输出:
使用DMA搬运log buffer中数据到串口,同时CPU可以处理其他事情,这种方式对系统影响最小,并且输出log及时,是实际使用中用的最多的方式。并且不仅可以用串口,其他可以用DMA操作的接口(如SPI、USB)都可以使用这种方法来打印log。
最后要讨论的是在一些封装中没有串口,或者串口已经被用作其他用途时如何输出log,这时可以找一个空闲的普通IO,模拟UART协议输出log到上位机的串口工具。常用的UART协议如下:
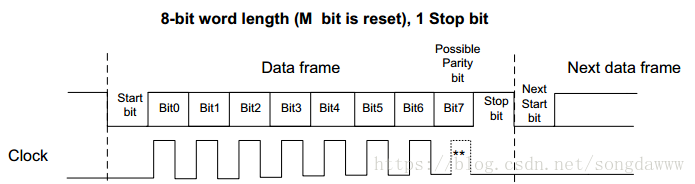
只要在确定的时间在IO上输出高低电平就可以模拟出波形,这个确定的时间就是串口波特率。为了得到精确延时,这里使用TIM4定时器产生1us的延时。注意:定时器不能重复用,在测试工程中TIM2、3都被用了,如果重复用就错乱了。初始化函数如下:
u8 simu_log_init(void* arg)
{
TIM_TimeBaseInitTypeDef TIM_InitStructure;
u32* bound = (u32*)arg;
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_SetBits(GPIOA, GPIO_Pin_2);
//Config TIM
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE); //使能TIM4时钟
TIM_DeInit(TIM4);
TIM_InitStructure.TIM_Prescaler = 1; //2分频
TIM_InitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_InitStructure.TIM_Period = 41; //1us timer
TIM_InitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM4, &TIM_InitStructure);
TIM_ClearFlag(TIM4, TIM_FLAG_Update);
baud_delay = 1000000/(*bound); //根据波特率计算每个bit延时
return 0;
}
使用定时器的delay函数为:
void simu_delay(u32 us)
{
volatile u32 tmp_us = us;
TIM_SetCounter(TIM4, 0);
TIM_Cmd(TIM4, ENABLE);
while(tmp_us--)
{
while(TIM_GetFlagStatus(TIM4, TIM_FLAG_Update) == RESET);
TIM_ClearFlag(TIM4, TIM_FLAG_Update);
}
TIM_Cmd(TIM4, DISABLE);
}
最后是模拟输出函数,注意:输出前必须要关闭中断,一个byte输出完再打开,否则会出现乱码:
u8 simu_print_ch(u8 ch)
{
volatile u8 i=8;
__asm("cpsid i");
//start bit
GPIO_ResetBits(GPIOA, GPIO_Pin_2);
simu_delay(baud_delay);
while(i--)
{
if(ch & 0x01)
GPIO_SetBits(GPIOA, GPIO_Pin_2);
else
GPIO_ResetBits(GPIOA, GPIO_Pin_2);
ch >>= 1;
simu_delay(baud_delay);
}
//stop bit
GPIO_SetBits(GPIOA, GPIO_Pin_2);
simu_delay(baud_delay);
simu_delay(baud_delay);
__asm("cpsie i");
return 0;
}
使用IO模拟可以达到与真实串口类似的效果,并且只需要一个普通IO,在小封装芯片上比较使用。
本文来源网络,版权归原作者所有。如涉及作品版权问题,请联系我进行删除。
