

单光子成像技术涉及半导体工艺、光电器件以及集成电路设计等多个方面,基于单光子雪崩二极管(SPAD)的成像技术具有高动态二维灰度成像、高精度三维成像和荧光寿命成像能力,在安防监控、自动驾驶和生物医疗等领域具有广阔的应用前景。伴随着半导体工艺技术的飞速发展,单光子成像技术有望成为应用广泛的下一代视觉感知技术。
据麦姆斯咨询报道,中国科学院半导体研究所半导体超晶格国家重点实验室和中国科学院大学的科研团队对基于SPAD的成像技术进行了系统的介绍,包括SPAD器件、单光子成像涉及的关键电路以及二维灰度和时间分辨单光子图像传感器的最新研究进展。相关研究内容以“基于单光子雪崩二极管的成像技术综述”为题发表在《集成电路与嵌入式系统》期刊上。
单光子雪崩二极管
单光子雪崩二极管是单光子成像的关键核心器件,其本质为一个工作在反向偏压下的PN结,且工作电压高于击穿电压,处于盖格模式,I-V特性曲线如图1(a)所示,反偏PN结能带结构及电子-空穴对输运过程如图1(b)所示。其基本原理为:当耗尽区(倍增区)没有自由载流子并且反向偏压达到雪崩击穿要求的数值时,SPAD将处于稳态,器件耗尽区中会形成很强的电场,但是没有自由载流子发生电离,待入射光产生的光生载流子注入至耗尽区,在雪崩倍增效应下连续碰撞电离后产生雪崩信号。SPAD具有高灵敏度和高增益的特点。
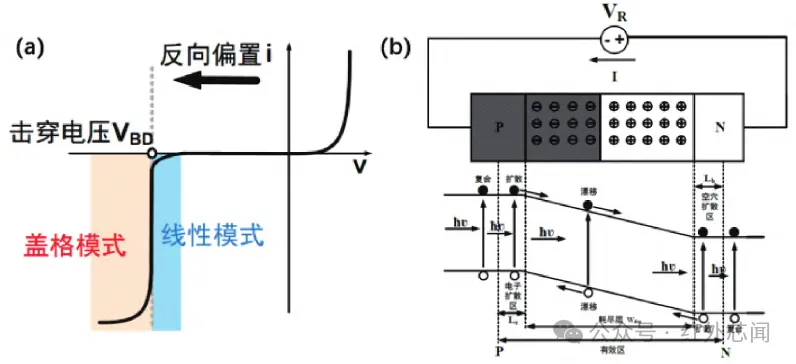
图1 单光子雪崩二极管图
SPAD主要性能参数包括光子探测效率(PDE)、暗计数率(DCR)、串扰以及时间抖动等。SPAD灵敏度主要由光子探测效率表征,指入射光子触发雪崩的概率。
近年来,随着半导体工艺技术的飞速发展,CMOS兼容的硅基SPAD器件研究成果大量涌现。其典型结构如图2所示,采用半导体制造的离子注入工艺,形成PN结,充分利用半导体工艺的规模化效应,实现低成本、高性能的SPAD器件。按照光子入射方向,目前硅基SPAD器件主要分为前照式和背照式两种结构。
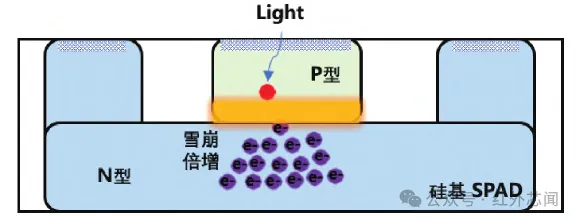
图2 硅基SPAD器件典型结构
前照式单光子雪崩二极管
中国科学院半导体研究所曹静等人基于标准180 nm CMOS工艺设计的一款前照式SPAD器件结构,如图3(a)所示。该SPAD利用平台固有的P⁺和N-Well离子注入层形成雪崩区,采用P-Well作为保护环,来降低边缘电场强度,防止边缘击穿。典型的前照式SPAD器件还包括P-Well/Deep N-Well型结构。
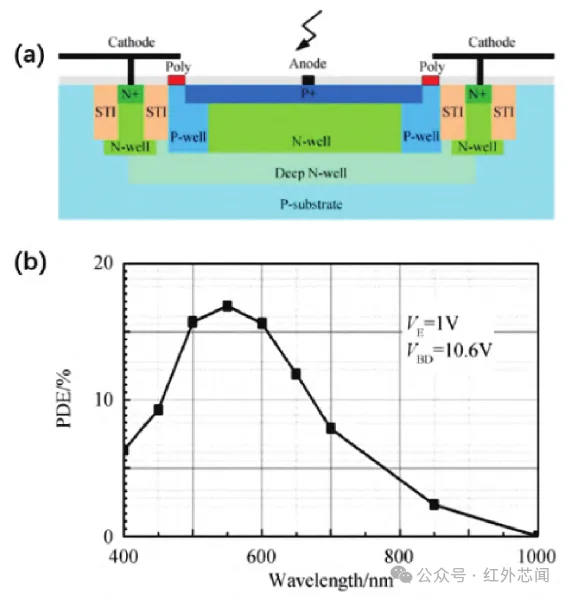
图3 P⁺和N-Well型SPAD

图4 P-Well/Deep N-Well型SPAD
出于人眼安全以及抗环境光干扰的考量,SPAD近红外探测效率的提升对于三维成像等主动光探测应用具有重要的意义。基于标准CMOS工艺设计的前照式SPAD器件结构,离子注入层较浅,近红外探测效率难以提高,因此利用一些特色CMOS工艺实现SPAD器件性能的提升,也是一个值得探索的方向。
背照式单光子雪崩二极管
相比于前照式结构,背照式SPAD器件结构更有利于三维堆叠集成,具有更多的优势,下面将结合相关研究成果进行具体介绍。图5(a)为日本索尼公司设计的一款10 μm尺寸的背照式SPAD器件,采用三维堆叠工艺,上层芯片集成SPAD阵列,下层芯片集成像素电路阵列和信号处理电路,利用Cu-Cu混合键合的方式进行三维堆叠。采用SPAD和电路分离的方式可以提高像素填充因子,并能够对两层芯片采用的工艺分别进行优化,具有更高的灵活度。

图5 索尼背照式SPAD器件
像素尺寸的微缩一直是图像传感器领域不断追求的目标。2022年,索尼公司进一步将背照式SPAD器件尺寸缩小至2.5 μm,结构如图6(a)所示,同时优化了表面微透镜的设计。
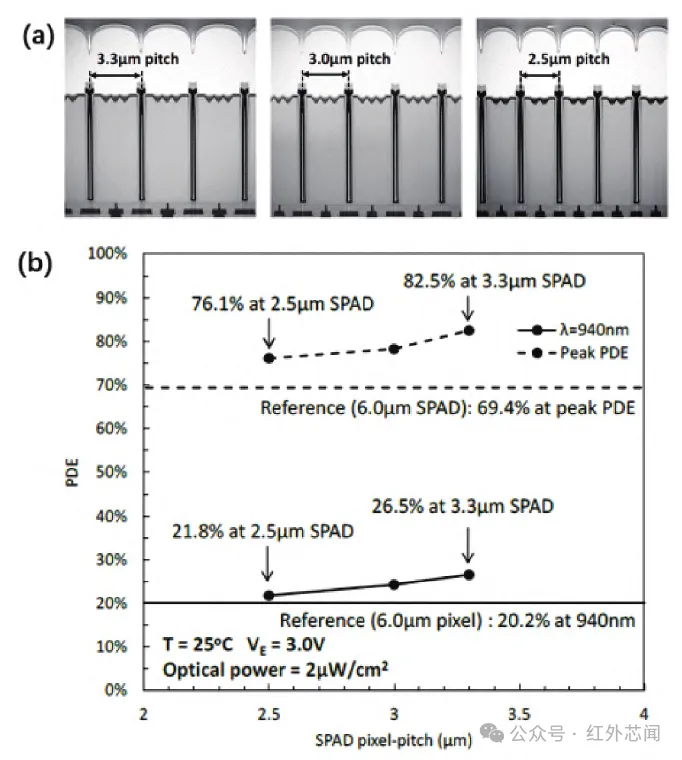
图6 索尼背照式SPAD器件
除了索尼公司以外,也有其他公司和研究机构投入大量资源开展SPAD器件研究。日本佳能公司通过掺杂调节的方式设计了一款Charge-Focusing型SPAD器件,可将雪崩区以外的光生载流子汇聚到雪崩区,提高雪崩触发概率,该结构可达到近似100%填充因子的效果,同时保持较小的雪崩区域,也有利于降低器件暗噪声水平。关于SPAD器件结构的研究成果仍然在不断涌现,SPAD器件尺寸相比于CIS图像传感器像素尺寸仍然有一定差距,其尺寸的进一步微缩和器件性能的提升必将面临新的问题和挑战。
单光子成像关键电路
除了核心感光器件单光子雪崩二极管,单光子成像还需要结合同SPAD相匹配的关键电路,包括像素淬灭电路和相关性检测等前端电路,以及进行时间分辨的时间测量或时间门控电路。一个简单的SPAD三维成像信号处理流程示意图如图7所示。
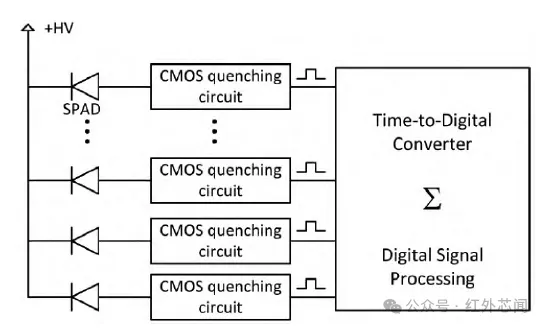
图7 SPAD信号处理流程图
像素淬灭电路
当单光子雪崩二极管被触发雪崩后,如果没有外界的作用,将一直维持在雪崩状态,无法再进行单光子检测,且过大的雪崩电流会使器件产生损耗,因此通常会将单光子雪崩二极管与淬灭-恢复电路联合使用。根据工作机制,淬灭-恢复电路可以分为被动式、主动式以及门控式三种。
以被动淬灭-恢复电路为例,分析其工作原理,最简单的被动淬灭-恢复电路是将SPAD直接与一个较大阻值电阻串联,如图8(a)所示。当SPAD被触发雪崩,雪崩电流流过淬灭电阻时,电阻上会产生足够大的压降,使得SPAD两端的偏置电压低于击穿电压,此时耗尽区的电场强度不足以让载流子继续引发碰撞电离,因此雪崩过程被淬灭。在雪崩淬灭后,PN结耗尽区的寄生电容将通过电阻缓慢充电到初始偏置电压,并具有再次进行单光子检测的能力。对于电阻淬灭恢复电路,恢复时间由RC时间常数决定,R为淬灭电阻阻值,C为耗尽区寄生结电容。雪崩二极管淬灭和恢复过程的持续时间又被称为死时间,如图8(b)所示,处于死时间内的单光子雪崩二极管不具有检测光子的能力。
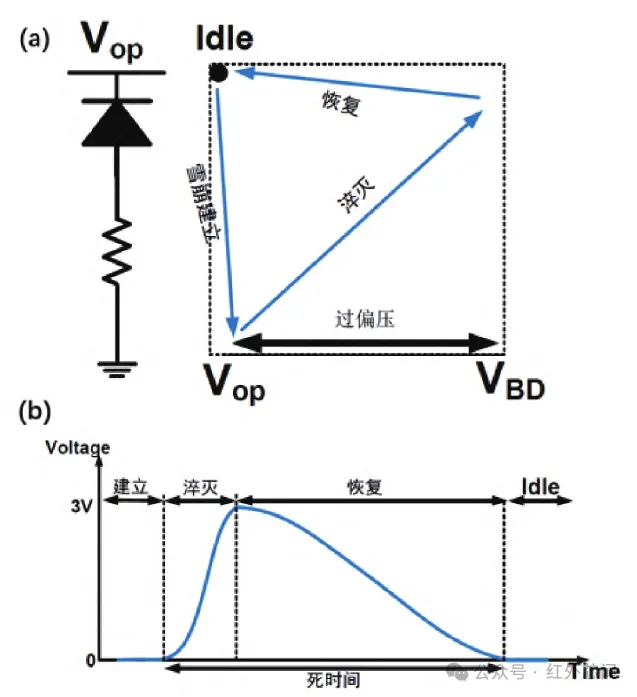
图8 被动淬灭
相关性检测电路
SPAD三维成像需要结合主动光对物体进行探测,此时环境光和暗噪声都将成为干扰信号。相关性检测(CD)也称作重合检测或并发性检测,是目前常用的抑制环境光干扰的手段。基本原理为利用环境光子随机分布、信号光子集中分布的特点,通过将2×2或3×3等多个像素构造成宏像素,将其输出信号合并为一个输出信号,并设置一个时间窗口(一般等于激光脉冲宽度),在该窗口内各个像素同时开启,对到来的光子进行检测并记录个数,若达到设定阈值的情况,则认定为信号光子,进行保存,反之则认为是环境光子,不进行保存,从而达到抗环境光干扰的目的。
通过与门方式实现的相关性检测,电路原理简单,但当宏像素包含的SPAD个数增多,与门规模会变得非常庞大,难以对任意两个输入进行检测。基于宏像素方式实现的相关性检测,会损失图像分辨率。
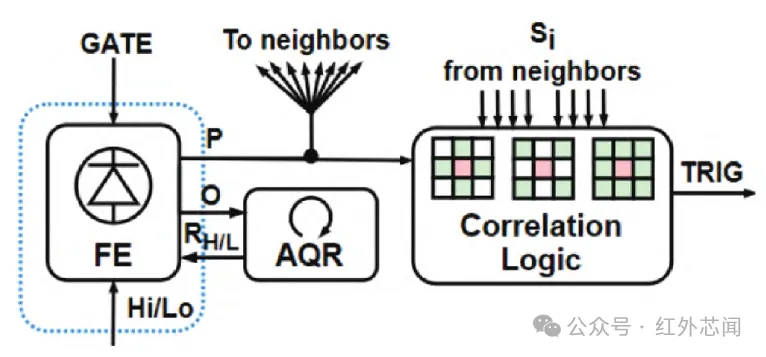
图9 单像素相关性检测电路
时间测量电路
时间数字转换器(TDC)可以用来对时间信息进行测量,是单光子图像传感器实现时间分辨成像的关键电路,其原理如图10(a)所示。通过测量激光发射和返回之间的时间差,计算得到物体距离信息。TDC的实现方式有很多种,主要可以分为模拟类和数字类.
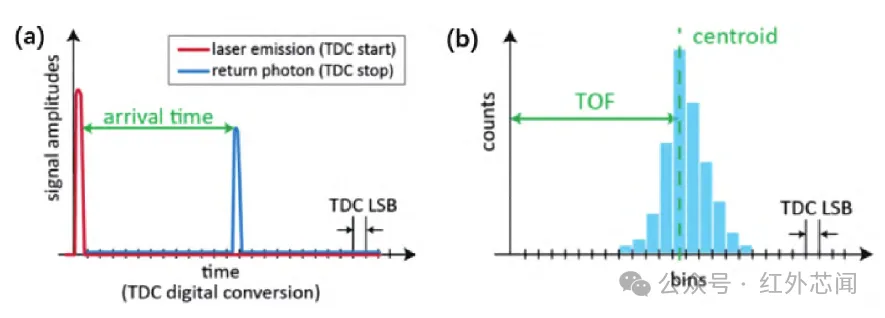
图10 时间测量方式
时间门控电路
基于TDC方式的时间分辨成像,效率较高,但采用像素级TDC会降低填充因子,不利于像素大规模集成,而采用列共享TDC,则很难兼容全局曝光模式,并且TDC电路本身也存在死时间等问题。除此之外,基于单光子的时间分辨成像,还有一种采用时间门控的光子计数法。其原理如图11(a)所示,通过一个随时间逐步位移的门控信号对门控时间内SPAD输出进行计数,以扫描的方式,经直方图统计,得到时间尺度上返回的信号光子信息,如图11(b)所示。时间门控方法可以将门控产生电路置于像素阵列外部,不影响像素填充因子,相对而言,像素电路架构更简洁,有利于像素大规模集成,实现高分辨率成像。
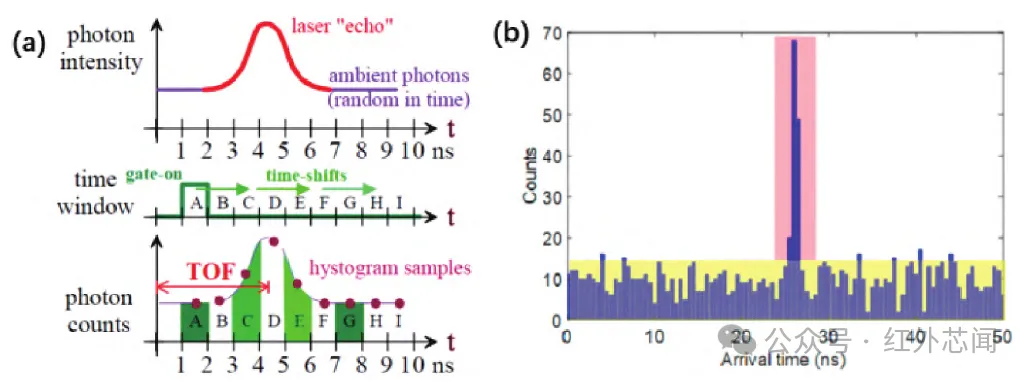
图11 时间门控方式
二维灰度单光子成像技术
传统的CMOS图像传感器通过对光信号进行光电转换,并对光电流积分得到光强信息,之后进行模数转换和读出。基于SPAD的单光子成像技术与上述方式不同,通过雪崩效应实现对光子的快速检测,具有单光子级灵敏度。
SPAD二维灰度成像的基本原理如图12所示,将入射光视为在空间和时间上随机离散分布的光子,经SPAD转换为随机离散的电学脉冲,其脉冲密度便对应了光强信息。通过对一定时间内SPAD输出的离散电学脉冲进行计数,便可实现对光强的检测,这一探测方式被称为单光子计数法。因此,SPAD二维图像传感器又被称为单光子计数图像传感器。
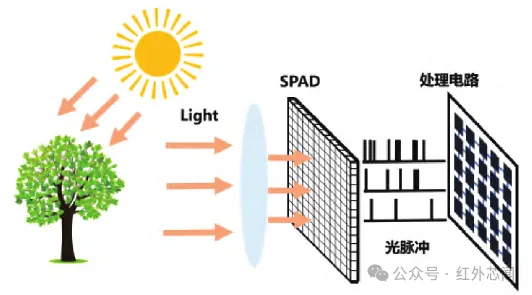
图12 SPAD灰度成像原理
高分辨率二维灰度成像
近年来,随着半导体工艺技术的飞速发展,国内外多个研究机构和企业都投入了大量资源开展SPAD器件及像素阵列相关的研究,并取得了一系列重要的研究成果。2020年,洛桑联邦理工学院的Morimoto等人基于180 nm CMOS工艺,首次突破了百万像素SPAD图像传感器,芯片显微照片如图13(a)所示,二维灰度成像效果如图13(b)所示。2021年,日本佳能公司推出了320万像素SPAD图像传感器,芯片显微照片如图14(a)所示,成像效果如图14(b)所示,该图像传感器采用三维堆叠工艺。
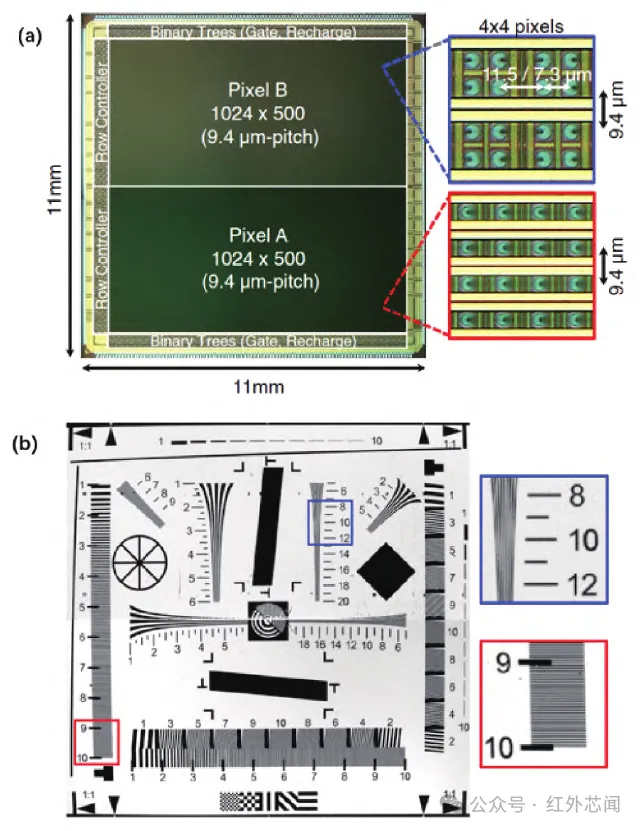
图13 百万像素SPAD图像传感器
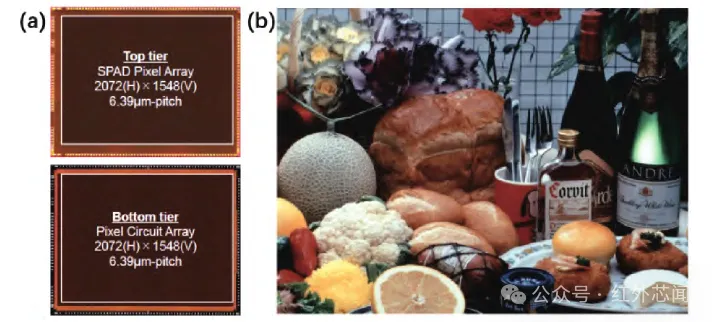
图14 320万像素SPAD图像传感器
高动态二维灰度成像
SPAD具有单光子级灵敏度,同时基于单光子计数的成像方式不受满阱容量限制,因此可以实现高动态成像。2024年,索尼公司的Takatsuka等人基于90 nm和22 nm三维堆叠工艺,利用多周期时钟复位和最高有效位读出技术实现了120 dB动态范围SPAD图像传感器,像素电路如图15(a)所示,成像效果如图15(b)所示。伴随工艺技术的不断进步,各公司和研究机构的研究成果不断涌现,基于单光子成像技术的SPAD图像传感器也在向更高分辨率和更高动态范围快速发展。
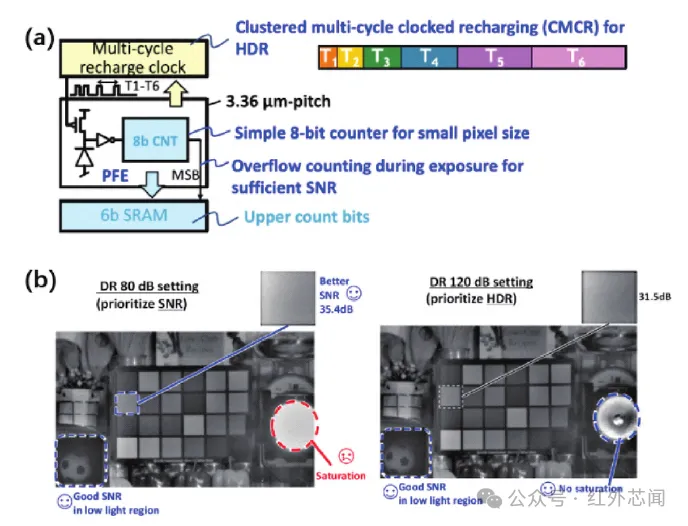
图15 索尼120 dB SPAD图像传感器
时间分辨单光子成像技术
SPAD具有皮秒级的时间分辨率,可以实现高精度时间分辨成像,采用的技术被称为时间相关单光子计数(TCSPC),该技术在光子计数的基础上发展起来,可以记录下光子的到达时间,原理如图16所示。其利用环境光子造成的触发在时间上是随机分布的,而激光回波光子造成的触发具有时间相关性,在脉冲光强度较弱,重复频率较高时,通过测量多个周期内的光子到达时间建立直方统计图,从而得到回波光脉冲的准确波形,并与环境光造成的随机分布噪声相区分。本文主要介绍基于SPAD实现的时间分辨单光子成像技术在两个方向的应用,主要包括三维飞行时间(ToF)图像传感器和荧光寿命成像。
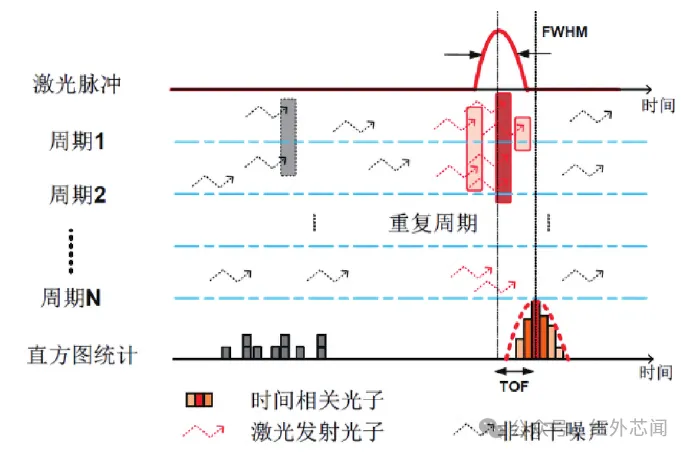
图16 时间相关单光子计数
三维ToF图像传感器
SPAD三维成像主要采用直接ToF测距法,原理如图17所示,通过测量激光发射到传感器接收到激光回波信号的时间,确定物体的距离信息。三维ToF图像传感器具有广阔的应用前景,其中一个重要的应用领域便是车载激光雷达(LiDAR),根据激光发射方式的不同,三维ToF成像系统可以分为Flash型和Scanning型,Flash型采用面发射激光,一次照亮整个场景,并采用面阵传感器接收;Scanning型采用线发射激光对场景扫描,接收端可以采用线阵传感器也可以采用面阵传感器。
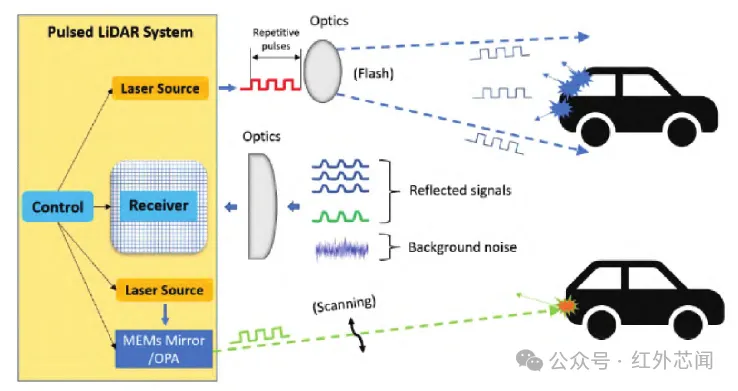
图17 ToF三维成像原理示意图
荧光寿命成像
SPAD图像传感器所具有的时空分辨特性还能够实现荧光寿命成像(FLIM)。荧光寿命成像技术被用来实现对微环境中许多生化参量的定量测量,如细胞中折射率、黏度、温度、pH值的分布和动力学的变化等,能十分灵敏地反映激发态分子与周围微环境的相互作用及能量转移过程,成像效果如图18所示,在生物医学研究中具有非常重要的意义。SPAD图像传感器能够探测非常微弱的光强(单光子量级),且可以通过门控信号控制SPAD的工作状态,便于对样品在时间和空间上进行采样和计算,最后得到高质量成像效果,具有响应速度快、体积小、功耗低等优点。
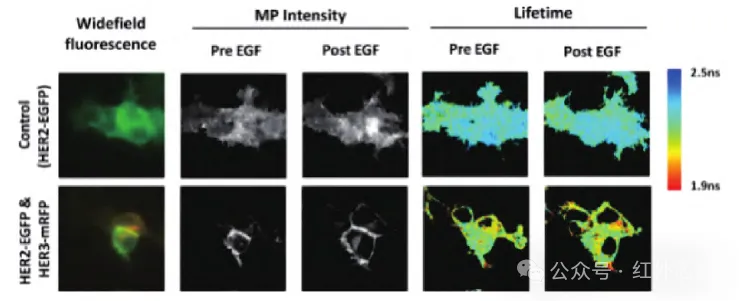
图18 荧光寿命成像
结束
单光子图像传感器具有灰度成像、深度成像和荧光寿命成像等多种视觉信息获取能力,同时具有高灵敏度、高动态范围和高时间分辨率的优越性能。随着工艺技术的飞速发展,SPAD器件尺寸越来越小,器件性能逐步提升。三维堆叠工艺的引入,也使像素器件和电路性能可以分别优化,SPAD单光子成像技术的优越性能逐步得到充分利用,像素分辨率、动态范围以及测距范围等不断提升,展示出了巨大的应用潜力,未来必将在实际场景中越来越多地看到SPAD图像传感器的身影。
论文信息:
http://service.jices.cn/CN/Y2024/V24/I5/10#61



