

旋转活塞流量计是一种容积式流量仪表,它具有工作可靠、测量精度高、压力损失小,当介质粘度大于50cp时,粘度的变化对精度无影响。它适用于不含固体颗粒介质的液体瞬时流量和累积流量的测量。仪表使用一段时间后,几经检修,标定数据证实,许多流量计已出现超差现象。下面我们通过对其测量原理及结构组成的分析,来剖析产生误差的根源和修正方法。
测量原理分析
旋转活塞流量计是基于将测量室(V1+V2)连续充满和排空原理进行测量的(见图1)。测量机构是由带盖的测量室、旋转活塞及隔板组成。开槽活塞有上、下两个活塞销,隔板径向安装在进出口之间,测量室销与导环同心。测量时,开槽活塞的槽口沿隔板作直线运动,活塞销沿导环作圆周运动。由于测量室容积是固定的,则流经测量室介质的瞬时流量大小只与旋转活塞转动的速度有关,累积量与旋转活塞转动的圈数有关。
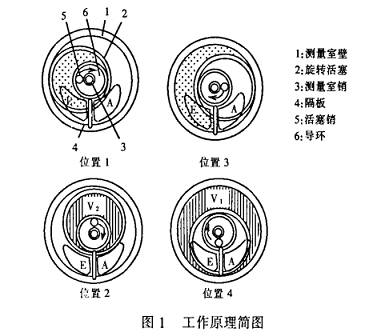
瞬时流量(Q)=(V1 + V2)旋转速度(V)
累积流量(Q)=(V1 + V2)旋转圈数(n)
从测量原理我们可以看出,测量是否准确,是否满足或达到该精度要求,主要取决于测量室的容积是否发生变化。只要容积恒定不变,测量误差就不易产生。即产生测量误差的根源是测量室容积发生变化。
测量误差的产生与修正
1 、测量室客积变化产生的误差与修正
旋转活塞流量计在使用过程中,由于工艺管道内压力的变化,使得旋转活塞瞬时转速过大,导致活塞槽口对隔板的冲击,使隔板弯曲。对这一类表进行检修时发现,凡是隔板弯曲甚至断裂引起的故障,由于旋转活塞旋转时不能按照原来的运动轨迹转动,造成测量室的内壁和底面、活塞上下端面以及内外壁产生严重磨损,甚至出现划痕和凹槽。在这种情况下,就需要在更换隔板后对测量室及活塞进行研磨,使旋转活塞能在测量室内旋转自如,重新起到测量作用。但是经过多次检修研磨后,测量室的容积将发生变化(见图2)。
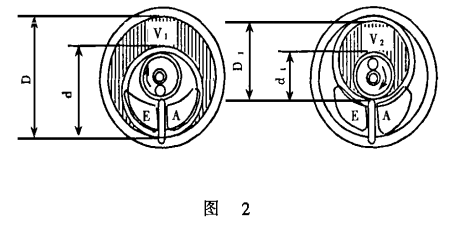
研磨前:V =(V1 + V2)=[(D2 - d2)+(D12 - d12)]
H— 测量室深度(高度);
V— 总容积;
V1— 外容积;
V2— 内容积。
研磨后,将会造成以下尺寸发生变化。
D↗ 、D1↗(增大),d↘、d1↘(减小),那么
V' =(V1 + V2)= [(D2 - d2)+(D12 - d12] + △V = V + △V
V'— 研磨后总容积;
△V— 研磨前、后容积变化量。
若V、V'对应的体积流量分别为Q、Q',删该表的引用误差为:
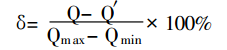
随着检修、研磨次数的增多,δ值将越来越太,超过该表的精度等级范围,使其测量精度不能满足工艺生产的需要。为了使它重新获得较高的测量精度,恢复其测量的准确性,出现这种测量误差,我们可以通过以下两种途径进行修正,使其达到精度要求。
(1) 利用检修后的标定数据,通过更换配对齿轮的方法进行修正。
大家都知道,许多流量测量仪表发讯机构都是采用齿轮机构传送的,齿轮的变速比决定了指示机构与测量机构的比例对应关系。我们就是利用改变这种比例关系来达到修正的目的。
例如:一台旋转活塞流量计,精度为0.5级,经多次检修、研磨后,重新标定,标定出的指示误差值为-1.27%。现用更换配对齿轮的方法进行修正,步骤如下:
a.拆开发讯机构的变速齿轮部分,卸下变速齿轮,并读出齿轮上的标记。若测量机构齿轮标记为“1-74”,指示机构齿轮标记为“1-125”。
b.对照表查出原配对齿轮已补偿的指示误差为0.29%,然后计算出流量计的实际误差。
实际误差=已补偿指示误差+标定误差
= 0.29% +(-1.27%)=-0.98%
c.对照表2查出补偿值为-0.98%的配对齿轮,测量机构齿轮标记为“1-60”,指示机构齿轮标记为“1-110”,找出印有该标记的配对齿轮装上,并重新标定,即可达到精度要求。
(2) 利用乘以系数k的方法进行修正。
目前,许多厂都使用了集散系统,KMM数字调节器等仪表系统,这类仪表系统都具有对可变参数的系数进行调整、修改的功能。我们就是利用这种系数调整的方法,来实现对误差的修正。
例如,一台旋转活塞流量计,精度为0.5级,量程为0.6~6m3/h,经过多次检修、研磨后,重新标定其指示相对误差为-1.05%。根据所给数据,得到表3和图3。
表3
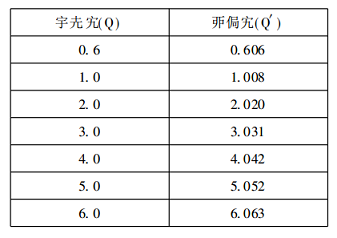
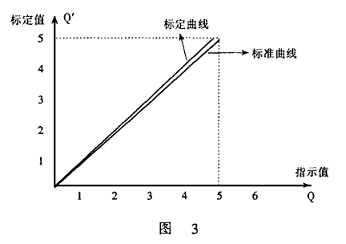
根据表3和图3,我们可以看出:
检修标定前:
比率系数(k)=tɡα=标定值/指示值=1
检修后标定:
比率系数(k')=tgα‘=

根据计算出的比率系数,在集散系统的该控制回路中,或在KMM调节器可变参数中通过组态,修正现场来的测量信号,得到实际的指示值和累积值。
实际指示值=测量示值(PV值)×比率系数(k'),即:
Q' = Q·K'
2 、介质温度变化引起介质密度变化而产生的误差与修正
众所周知,许多体积流量仪表都存在温度对测量流量精度的影响,它可以通过补偿、选型等方法来最大限度地克服这种影响。然而许多生产装置,特别是化工装置,对流量的要求比较高,化学反应是考虑质量流量,而不是体积流量。质量流量(M)与体积流量(Q)的关系是:M=ρ·Q(ρ是介质密度),在体积流量不变的情况下,如果流体介质密度发生变化,则质量流量将随之而变。
对于液体介质,压力对密度影响甚微,可以忽略不计。但是温度对密度的影响就不能忽视。为了解决测量体积流量的旋转活塞流量计达到测量质量流量的目的,我们做了一些尝试。下面我们以化工原料中乙二醇为例,根据乙二醇介质的温度与密度关系,讨论乙二酵的温度对体积流量测量的影响。
例如,一台旋转活塞流量计,精度为0.5级,测量范围为0.6~6m3/h,工艺要求设定控制流量为2.5m3/h,介质温度为180℃。若温度变为165℃时,则在质量流量不变的情况下,体积流量将发生变化,并出现流量示值偏离给定值,出现示值超差现象。
180℃时的体积流量为2.5m3/h,乙二醇密度为986kg/m3,则此时控制的质量流量为:
M = ρ·Q = 986×2.5 = 2465kg/h
165℃时,如果要保持控制的质量流量为2465kg/h。此时乙二醇密度为1000kg/h,则相应的体积流量为:
那么,由于温度的变化,在质量流量不变的情况下,体积流量产生的误差是显而易见的。

示值相对误差=

由于这种误差是由旋转活塞流量计外部因素(温度)引起的,而且对工艺影响也比较大,化学反应只与物质的质量(或者说摩尔数)有关,而与物质的体积无关。因此,要保证介质的质量流量不变,在温度发生较大变化时,就必须考虑对体积流量的误差修正,而这种修正是不能通过旋转活塞流量计本身来修正的,也不能通过更换配比齿轮或乘以系数k的方法来修正,而只有通过改变体积流量的设定值来修正。以上例来说,如果将流量设定从2.5m3/h改为2.465m3/h,就可达到修正目的,满足工艺对测量的要求。
综上所述,我们对旋转活塞流量计的测量误差及修正方法进行了简要论述,对如何克服因容积、温度变化而带来的误差作了一些分析。其方法简便易行,有利于解决该表超差降级问题。
- END -
制造业的未来是智能化,智能化的基础就是传感器;互联网的方向是物联网,物联网的基石也是传感器;
《传感器技术》汇编了一套各种传感器的基础知识,介绍了各种传感器的原理。
【点击蓝色标题,获取文章】
1、一文读懂MEMS传感器
2、一文读懂接近传感器
3、一文读懂磁传感器
4、一文读懂流量传感器
5、一文读懂压力传感器的原理及分类
6、一文读懂加速度传感器
7、一文读懂超声波传感器
8、一文读懂位移传感器
9、一文读懂光电传感器
10、一文读懂光纤传感器
11、一文读懂温湿度传感器
12、一文读懂图像传感器
13、一文读懂生物传感器
14、一文读懂霍尔传感器
15、一文读懂距离传感器
16、一文读懂氧传感器
17、一文读懂风向风速传感器
18、一文读懂纳米传感器
19、一文读懂红外传感器
21、一文读懂气体传感器
23、汽车传感器今日谈
24、一文读懂手机传感器
25、一文读懂医疗传感器
26、一文读懂化学传感器
27、一文读懂角速度传感器(陀螺仪)
28、一文读懂换能器
29、一文读懂旋转编码器
30、一文读懂变速器
31、一文读懂振动传感器
32、一文读懂电容传感器
33、一文读懂电涡流传感器
34、一文读懂电感式传感器
35、一文读懂光栅传感器
36、一文读懂压电式传感器
37、一文读懂烟雾传感器
38、一文读懂电阻式传感器
39、无线网路传感器详解
40、MEMS传感器市场状况及主要厂商
41、图像传感器的市场状况和主要厂商
42、气体传感器的市场状况及主要厂商
43、指纹传感器的市场状况和主要厂商
44、汽车MEMS传感器的市场状况和主要厂商

为您发布产品,请点击“阅读原文”
