本文实现nPM1300读写寄存器的驱动,使用IO模拟IIC的方式。
IO模拟IIC,可以参考公众号文章《超级精简系列之三:超级精简的IO模拟IIC的C实现》https://mp.weixin.qq.com/s/ESzWWqxHpQevsWfjV0s2VQ。
为了方便测试,实现了shell命令行,可以通过命令行方便进行任意寄存器的读写测试。参考公众号文章《一个超级精简高可移植的shell命令行C实现》https://mp.weixin.qq.com/s/XLmbJn0SKoDT1aLdxHDrbg。
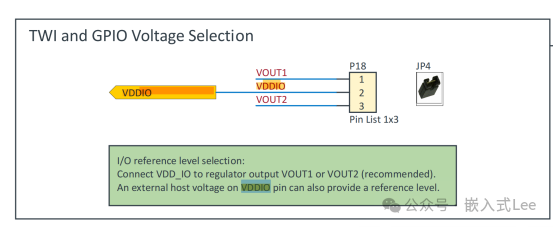
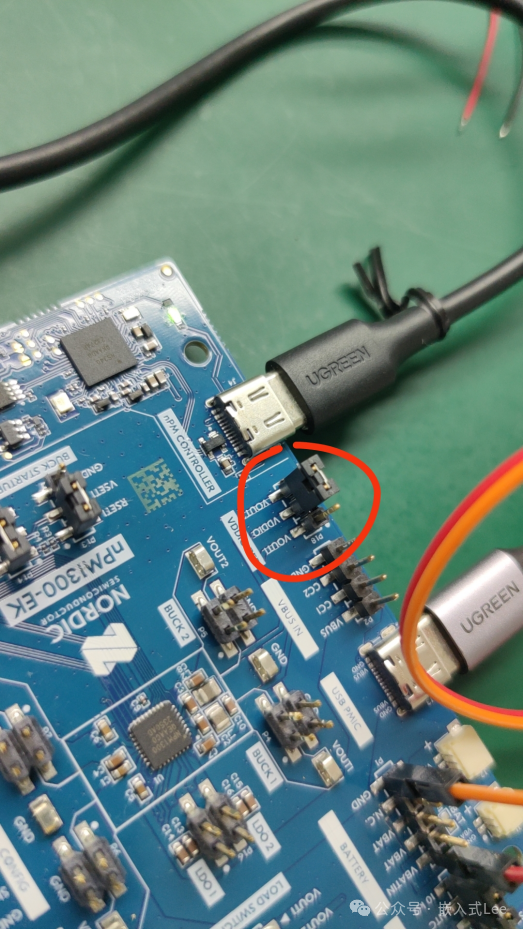
可以通过VDDIO引脚设置TWI的IO参考电压,这里使用VOUT2,3.3V,即P18的2和3短接。
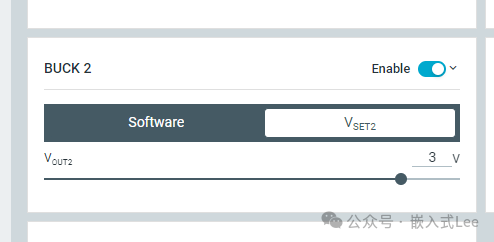
使用nPW PowerUP设置BULK2的输出为3.3V。
7位地址 110 1011.
所以加上W/R位,8位读写地址分别是0xD7和0xD6
速率100~1000kbps.
写寄存器
启动->
7位从地址/R/W加上 R/W=0-> ACK
16位寄存器地址(高字节在前)->ACK
读字节数据->ACK
停止
读寄存器
启动->
7位从地址/R/W加上 R/W=0-> ACK
16位寄存器地址(高字节在前)->ACK
启动->
7位从地址/R/W R/W=1-> ACK
读字节数据->ACK
停止
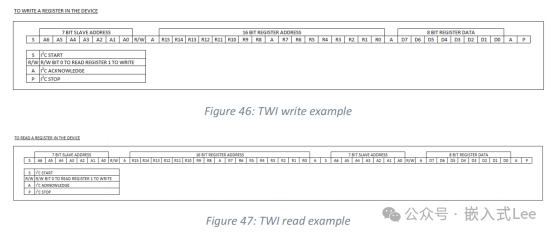
注意以上截图中R/W的描述。R/W BIT 0 TO READ REGISTER 1 TO WRITE是反的,文档是错误的,应该是0表示写,1表示读。
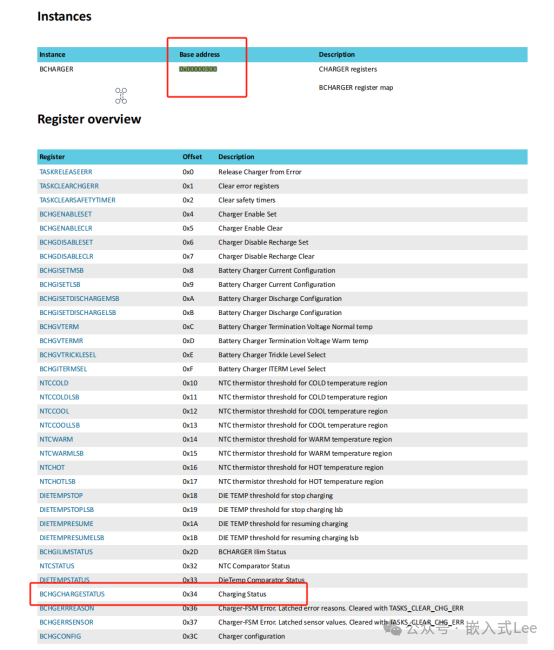
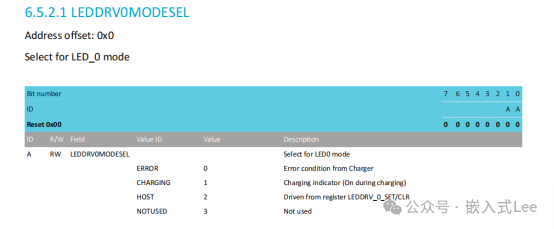
参考规格书的6,7,8灯章节,寄存器分布在各个章节,不是集中在一起。
寄存器的高8位即bank,参考寄存器的Base address的bit[12:8].

IO模拟IIC代码,完全可移植无需任何修改
Io_iic.c
#include "io_iic.h"/*** _______________________* SCL ____________| |__* ————————————————————————* SDA |______________* (1) (2) (4) (6)* (3) (5)* 其中(3) SDA低建立时间 (5) SDA高保持时间* (1) 拉高SDA (4)拉高SDA产生上升沿* (2) SCL拉高 SCL高时SDA上升沿即停止信号*/void io_iic_start(io_iic_dev_st* dev){/* SCL高时,SDA下降沿 */dev->sda_write(1); /* (1) SDA拉高以便后面产生下降沿 */dev->scl_write(1); /* (2) 拉高SCL */if(dev->delay_pf != 0) /* (3) SCL高保持*/{dev->delay_pf(dev->delayus);}dev->sda_write(0); /* (4)SCL高时SDA下降沿 启动 */if(dev->delay_pf != 0) /* (5)SCL高保持 */{dev->delay_pf(dev->delayus);}dev->scl_write(0); /* (6)SCL恢复 */}/*** _______________________* SCL ____________| |____* ————————————————* SDA ————————————————————————|* (1) (2) (4) (6)* (3) (5)* 其中(3) SDA低建立时间 (5) SDA高保持时间* (1) 拉低SDA (4)拉高SDA产生上升沿* (2) SCL拉高 SCL高时SDA上升沿即停止信号*/void io_iic_stop(io_iic_dev_st* dev){/* SCL高时,SDA上升沿 */dev->sda_write(0); /* (1)SDA先输出低以便产生上升沿 */dev->scl_write(1); /* (2)SCL高 */if(dev->delay_pf != 0) /* (3)SCL高保持 */{dev->delay_pf(dev->delayus);}dev->sda_write(1); /* (4)SCL高时SDA上升沿 停止 */if(dev->delay_pf != 0) /* (5)SCL高保持 */{dev->delay_pf(dev->delayus);}dev->scl_write(0); /* (6)SCL恢复 */}/*** | B0 | B1~B6| B7 | NACK/ACK |* ___________ _ __________ ____________* ____________| | x |__________| |____________| |* (1)[2] (4) (6)[7] (9)[10] (12)* (3) (5) (8) (11)* 其中(1)(6)(12)拉低SCL;(4)(9)拉高SCL;* [2]输出 [7]转为读 [10]读ACK;* (3)(8)低保持时间,(5)(11)高保持时间。*/int io_iic_write(io_iic_dev_st* dev, uint8_t val){uint8_t tmp = val;uint8_t ack = 0;if(dev == 0){return -1;}if((dev->scl_write == 0) || (dev->sda_write == 0) || (dev->sda_read == 0) || (dev->sda_2read == 0)){return -1;}/* SCL下降沿后准备数据,对方上升沿采集数据,高位在前 */for(uint8_t i=0; i<8; i++){dev->scl_write(0); /* (1) SCL拉低以便修改数据 */if((tmp & 0x80) != 0) /* [2] 准备SDA数据 */{dev->sda_write(1);}else{dev->sda_write(0);}if(dev->delay_pf != 0){dev->delay_pf(dev->delayus); /* (3) SCL拉低时间即数据建立时间 */}dev->scl_write(1); /*(4) SCL上升沿对方采样 */if(dev->delay_pf != 0){dev->delay_pf(dev->delayus); /* (5) SCL高保持时间,数据保持时间 */}tmp <<= 1; /* 处理下一位 */}dev->scl_write(0); /* (6)SCL归0 完成8个CLK */dev->sda_2read(); /* [7]SDA转为读 */if(dev->delay_pf != 0){dev->delay_pf(dev->delayus); /* (8)第九个时钟拉低时间 */}dev->scl_write(1); /* (9)SCL上升沿 */ack = dev->sda_read(); /* [10]上升沿后读 */if(dev->delay_pf != 0){dev->delay_pf(dev->delayus); /* (11)第九个时钟高保持 */}dev->scl_write(0); /* (12)恢复SCL到低 */return (ack==0) ? 0 : -1;}/*** | B0 | B1~B6| B7 | NACK/ACK |* ___________ _ __________ ____________* ____________| | x |__________| |____________| |* (1)[2] (4)[5] (7)[8] (10) (12)* (3) (6) (9) (11)* 其中(1)(7)(12)拉低SCL;(4)(10)拉高SCL;* [2]转为读 [5]读 [8]输出ACK;* (3)(9)低保持时间,(6)(11)高保持时间。*/int io_iic_read(io_iic_dev_st* dev, uint8_t* val, uint8_t ack){uint8_t tmp = 0;if((dev == 0) || (val == 0)){return -1;}if((dev->scl_write == 0) || (dev->sda_write == 0) || (dev->sda_read == 0) || (dev->sda_2read == 0)){return -1;}/* SCL下降沿后对方准备数据,上升沿读数据,高位在前 */for(uint8_t i=0; i<8; i++){tmp <<= 1; /* 处理下一位,先移动后读取 */dev->scl_write(0); /* (1) */dev->sda_2read(); /* [2]转为读输入高阻,以便对方能输出 */if(dev->delay_pf != 0){dev->delay_pf(dev->delayus);/* (3)SCL低保持时间 */}dev->scl_write(1); /* (4)SCL上升沿 */if(dev->sda_read()) /* (5)读数据(SCL低时对方已经准备好数据) */{tmp |= 0x01; /* 高位在前,最后左移到高位 */}if(dev->delay_pf != 0){dev->delay_pf(dev->delayus);/* (6)SCL高保持时间 */}}dev->scl_write(0); /* (7)恢复SCL时钟为低 */dev->sda_write(ack); /* [8]准备ACK信号(SCL低才能更行SDL) */if(dev->delay_pf != 0){dev->delay_pf(dev->delayus); /* (9)第九个SCL拉低时间 */}dev->scl_write(1); /* (10)SCL上升沿发数据触发对方读 */if(dev->delay_pf != 0){dev->delay_pf(dev->delayus); /* (11)第九个SCL拉高保持时间 */}dev->scl_write(0); /* (12)第九个SCL完成恢复低 *///dev->sda_write(1); /* 这里无需驱动SDA,后面可能还是读),需要发送时再驱动 */*val = tmp;return 0;}void io_iic_init(io_iic_dev_st* dev){if((dev != 0) && (dev->init != 0)){dev->init();}}void io_iic_deinit(io_iic_dev_st* dev){if((dev != 0) && (dev->deinit != 0)){dev->deinit();}}
Io_iic.h
extern "C"{typedef void (*io_iic_scl_write_pf)(uint8_t val); /**< SCL写接口 */typedef void (*io_iic_sda_write_pf)(uint8_t val); /**< SDA写接口 */typedef void (*io_iic_sda_2read_pf)(void); /**< SDA转为读接口 */typedef uint8_t (*io_iic_sda_read_pf)(void); /**< SDA读接口 */typedef void (*io_iic_delay_us_pf)(uint32_t delay); /**< 延时接口 */typedef void (*io_iic_init_pf)(void); /**< 初始化接口 */typedef void (*io_iic_deinit_pf)(void); /**< 解除初始化接口 *//*** \struct io_iic_dev_st* 接口结构体*/typedef struct{io_iic_scl_write_pf scl_write; /**< scl写接口 */io_iic_sda_write_pf sda_write; /**< sda写接口 */io_iic_sda_2read_pf sda_2read; /**< sda转为读接口 */io_iic_sda_read_pf sda_read; /**< sda读接口 */io_iic_delay_us_pf delay_pf; /**< 延时接口 */io_iic_init_pf init; /**< 初始化接口 */io_iic_deinit_pf deinit; /**< 解除初始化接口 */uint32_t delayus; /**< 延迟时间 */} io_iic_dev_st;/*** \fn io_iic_start* 发送启动信号* \param[in] dev \ref io_iic_dev_st*/void io_iic_start(io_iic_dev_st* dev);/*** \fn io_iic_stop* 发送停止信号* \param[in] dev \ref io_iic_dev_st*/void io_iic_stop(io_iic_dev_st* dev);/*** \fn io_iic_write* 写一个字节* \param[in] dev \ref io_iic_dev_st* \param[in] val 待写入的值* \retval 0 写成功(收到了ACK)* \retval -2 写失败(未收到ACK)* \retval -1 参数错误*/int io_iic_write(io_iic_dev_st* dev, uint8_t val);/*** \fn io_iic_read* 读一个字节* \param[in] dev \ref io_iic_dev_st* \param[out] val 存储读到的值* \param[in] ack 1发送NACK 0发送ACK* \retval 0 读成功* \retval -1 参数错误*/int io_iic_read(io_iic_dev_st* dev, uint8_t* val, uint8_t ack);/*** \fn io_iic_init* 初始化* \param[in] dev \ref io_iic_dev_st*/void io_iic_init(io_iic_dev_st* dev);/*** \fn io_iic_deinit* 解除初始化* \param[in] dev \ref io_iic_dev_st*/void io_iic_deinit(io_iic_dev_st* dev);}
Npm1300驱动代码,完全可移植无需任何修改
Npm1300.c
#include "npm1300.h"#define NPM1300_WR_ADDR 0xD6 /**< 11010110 写地址 */#define NPM1300_RD_ADDR 0xD7 /**< 11010111 读地址 *//*** \fn npm1300_read* 读数据* \param[in] dev \ref npm1300_dev_st* \param[in] reg 寄存器值* \param[out] val 存读出的值* \retval 0 成功* \retval <0 失败*/int npm1300_read(npm1300_dev_st* dev, uint16_t reg, uint8_t* val){/* 启动 */dev->start();/* 发送写地址 */if(0 != dev->write(NPM1300_WR_ADDR)){dev->stop();return -1;}/* 寄存器地址高字节 */if(0 != dev->write((reg>>8)&0xFF)){dev->stop();return -2;}/* 寄存器地址低字节 */if(0 != dev->write((reg>>0)&0xFF)){dev->stop();return -2;}/* 重新启动 */dev->start();/* 发送读地址 */if(0 != dev->write(NPM1300_RD_ADDR)){dev->stop();return -1;}/* 读数据 */if(0 != dev->read(val,1)){dev->stop();return -2;}/* 结束 */dev->stop();return 0;}/*** \fn npm1300_write* 写数据* \param[in] dev \ref npm1300_dev_st* \param[in] reg 寄存器值* \param[in] val 待写入的值* \retval 0 成功* \retval <0 失败*/int npm1300_write(npm1300_dev_st* dev, uint16_t reg, uint8_t val){/* 启动 */dev->start();/* 发送写地址 */if(0 != dev->write(NPM1300_WR_ADDR)){dev->stop();return -1;}/* 寄存器地址高字节 */if(0 != dev->write((reg>>8)&0xFF)){dev->stop();return -2;}/* 寄存器地址低字节 */if(0 != dev->write((reg>>0)&0xFF)){dev->stop();return -2;}/* 写数据 */if(0 != dev->write(val)){dev->stop();return -2;}/* 结束 */dev->stop();return 0;}/*** \fn npm1300_init* 初始化* \param[in] dev \ref npm1300_dev_st*/void npm1300_init(npm1300_dev_st* dev){dev->init();}/*** \fn npm1300_deinit* 解除初始化* \param[in] dev \ref npm1300_dev_st*/void npm1300_deinit(npm1300_dev_st* dev){dev->deinit();}
Npm1300.h
extern "C"{typedef void (*npm1300_iic_start_pf)(void); /**< IIC启动接口 */typedef void (*npm1300_iic_stop_pf)(void); /**< IIC停止接口 */typedef int (*npm1300_iic_read_pf)(uint8_t* val, uint8_t ack); /**< IIC读接口 */typedef int (*npm1300_iic_write_pf)(uint8_t val); /**< IIC写接口 */typedef void (*npm1300_iic_init_pf)(void); /**< 初始化接口 */typedef void (*npm1300_iic_deinit_pf)(void); /**< 解除初始化接口 */typedef void (*npm1300_iic_delay_us_pf)(uint32_t delay); /**< 延时接口 *//*** \struct npm1300_dev_st* 接口结构体*/typedef struct{npm1300_iic_start_pf start; /**< IIC启动接口 */npm1300_iic_stop_pf stop; /**< IIC停止接口 */npm1300_iic_read_pf read; /**< IIC读接口 */npm1300_iic_write_pf write; /**< IIC写接口 */npm1300_iic_init_pf init; /**< 初始化接口 */npm1300_iic_deinit_pf deinit; /**< 解除初始化接口 */uint8_t addr; /**< 3位硬件地址 */} npm1300_dev_st;/*** \fn npm1300_read* 读数据* \param[in] dev \ref npm1300_dev_st* \param[in] reg 寄存器值* \param[out] val 存读出的值* \retval 0 成功* \retval <0 失败*/int npm1300_read(npm1300_dev_st* dev, uint16_t reg, uint8_t* val);/*** \fn npm1300_write* 写数据* \param[in] dev \ref npm1300_dev_st* \param[in] reg 寄存器值* \param[in] val 待写入的值* \retval 0 成功* \retval <0 失败*/int npm1300_write(npm1300_dev_st* dev, uint16_t reg, uint8_t val);/*** \fn npm1300_init* 初始化* \param[in] dev \ref npm1300_dev_st*/void npm1300_init(npm1300_dev_st* dev);/*** \fn npm1300_deinit* 解除初始化* \param[in] dev \ref npm1300_dev_st*/void npm1300_deinit(npm1300_dev_st* dev);}
移植接口代码,仅需要移植io操作接口
npm1300_itf.c
/* IIC IO操作的移植 */static void io_iic_scl_write_port(uint8_t val){if(val){xx_gpio_write(WQ_GPIO_09, 1);}else{xx_gpio_write(WQ_GPIO_09, 0);}}static void io_iic_sda_write_port(uint8_t val){xx_gpio_close(WQ_GPIO_07);xx_gpio_open(WQ_GPIO_07, WQ_GPIO_DIRECTION_OUTPUT);if(val){xx_gpio_write(WQ_GPIO_07, 1);}else{xx_gpio_write(WQ_GPIO_07, 0);}}static void io_iic_sda_2read_port(void){xx_gpio_write(WQ_GPIO_07, 1);xx_gpio_close(WQ_GPIO_07);xx_gpio_open(WQ_GPIO_07, WQ_GPIO_DIRECTION_INPUT);}static uint8_t io_iic_sda_read_port(void){if(0 == xx_gpio_read(WQ_GPIO_07)){return 0;}else{return 1;}}static void io_iic_delay_us_port(uint32_t delay){uint32_t volatile t=delay;while(t--);}static void io_iic_init_port(void){xx_gpio_open(WQ_GPIO_07, WQ_GPIO_DIRECTION_OUTPUT);xx_gpio_open(WQ_GPIO_09, WQ_GPIO_DIRECTION_OUTPUT);xx_gpio_set_pull_mode(WQ_GPIO_07,WQ_GPIO_PULL_UP);xx_gpio_set_pull_mode(WQ_GPIO_09,WQ_GPIO_PULL_UP);xx_gpio_write(WQ_GPIO_07, 0);xx_gpio_write(WQ_GPIO_09, 0);}static void io_iic_deinit_port(void){xx_gpio_close(WQ_GPIO_07);xx_gpio_close(WQ_GPIO_09);}static io_iic_dev_st iic_dev={.scl_write = io_iic_scl_write_port,.sda_write = io_iic_sda_write_port,.sda_2read = io_iic_sda_2read_port,.sda_read = io_iic_sda_read_port,.delay_pf = io_iic_delay_us_port,.init = io_iic_init_port,.deinit = io_iic_deinit_port,.delayus = 500,};/* npm1300接口移植 */static void npm1300_iic_start_port(void){io_iic_start(&iic_dev);}static void npm1300_iic_stop_port(void){io_iic_stop(&iic_dev);}static int npm1300_iic_read_port(uint8_t* val, uint8_t ack){return io_iic_read(&iic_dev,val,ack);}static int npm1300_iic_write_port(uint8_t val){return io_iic_write(&iic_dev,val);}static void npm1300_iic_init_port(void){io_iic_init(&iic_dev);}static void npm1300_iic_deinit_port(void){io_iic_deinit(&iic_dev);}npm1300_dev_st npm1300_dev={.start = npm1300_iic_start_port,.stop = npm1300_iic_stop_port,.read = npm1300_iic_read_port,.write = npm1300_iic_write_port,.init = npm1300_iic_init_port,.deinit = npm1300_iic_deinit_port,.addr = 0,};/* 对外接口 */void npm1300_itf_init(void){npm1300_init(&npm1300_dev);}void npm1300_itf_deinit(void){npm1300_deinit(&npm1300_dev);}int npm1300_itf_write(uint16_t reg,uint8_t val){return npm1300_write(&npm1300_dev,reg,val);}int npm1300_itf_read(uint16_t reg,uint8_t* val){return npm1300_read(&npm1300_dev,reg,val);}
npm1300_itf.h
extern "C"{void npm1300_itf_init(void);void npm1300_itf_deinit(void);int npm1300_itf_write(uint16_t reg, uint8_t val);int npm1300_itf_read(uint16_t reg,uint8_t* val);}
测试代码
初始化,main.c中包含头文件调用初始化
npm1300_itf_init();
Shell命令行代码
shell_func.c种
包含头文件
命令列表添加两条命令
{ (uint8_t*)"npm1300rd", npm1300rdfunc, (uint8_t*)"npm1300rd reg"},{ (uint8_t*)"npm1300wr", npm1300wrfunc, (uint8_t*)"npm1300wr reg val"},
实现命令函数
void npm1300rdfunc(uint8_t* param){int reg;uint8_t val;if(1 == sscanf((const char*)param, "%*s %x", ®)){xprintf("read reg %x\r\n",reg);npm1300_itf_read(reg,&val);xprintf("%x\r\n",val);}}void npm1300wrfunc(uint8_t* param){int reg;int val;if(2 == sscanf((const char*)param, "%*s %x %x", ®, &val)){xprintf("write reg %x val %x\r\n",reg, val);npm1300_itf_write(reg,val);}}
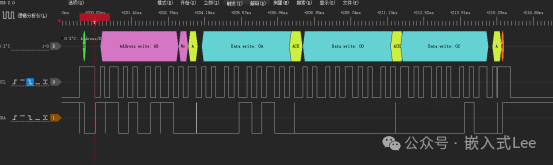
以读充电状态寄存器为例,bank为3,寄存器偏移为0x34,所以寄存器地址为0x334
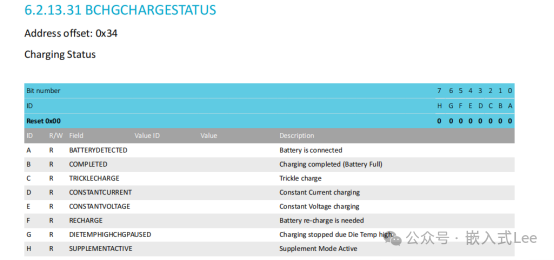
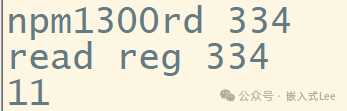
命令行输入npm1300rd 334,读到结果是0x11,即电池状态连接,常压充电状态
抓取波形如下

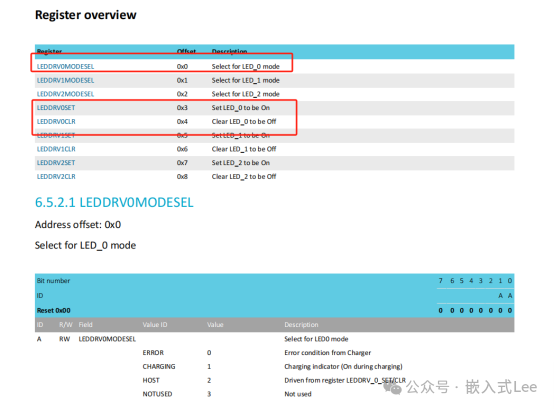
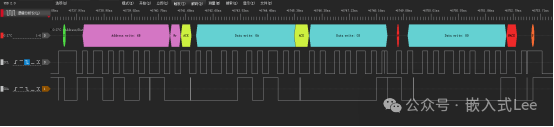
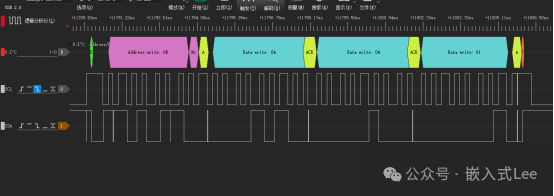
以操作LED0寄存器为例,一个模式寄存器控制模式,一个SET寄存器写1点亮,一个CLR寄存器写1熄灭。如果要使用SET和CLR寄存器控制,模式寄存器要配置为2.
寄存器bank为0xA,偏移分别为0x00,0x03和0x04,所以分别对应寄存器0xA00,0xA03和0xA04.

命令行输入
npm1300wr a00 2 //设置由SET和CLR寄存器控制
npm1300wr a03 1 //ERR红色灯亮
npm1300wr a04 1 //ERR红色灯灭
抓包如下
手册描述很详细,参考手册可以很快的实现寄存器读写的驱动,
需要注意的是,手册中关于地址字节的W/R位的描述是反的。
另外寄存器是按照不同章节功能分开介绍的,不是集中在一起的。
nPM1300_PS_v1.0.pdf
