


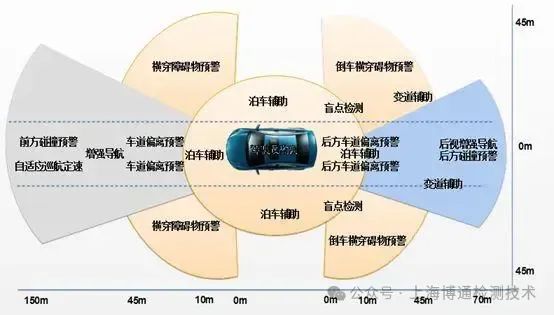
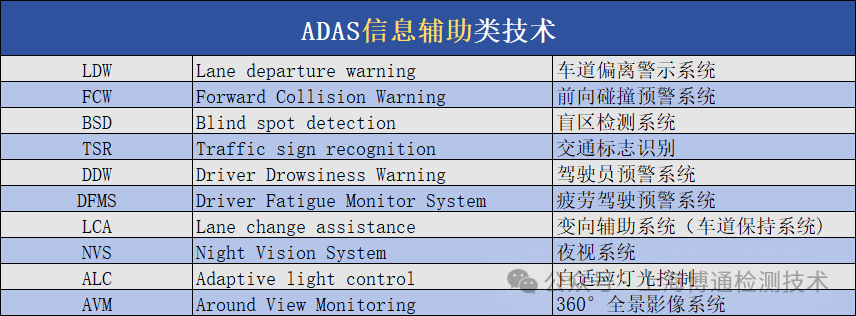
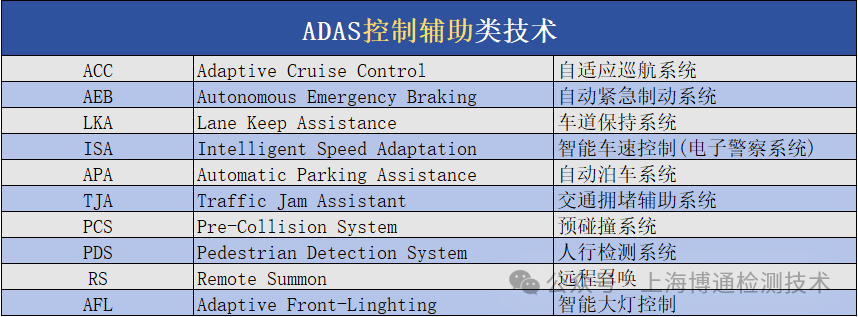
根据《道路车辆先进驾驶辅助系统(ADAS)术语及定义要求》,ADAS可以分为信息辅助与控制辅助两大类别
1)AEB(Autonomous Emergency Braking),自动紧急制动
AEB 系统采用雷达测出与前车或者障碍物的距离,然后利用数据分析模块将测出的距离与警报距离、安全距离进行比较,小于警报距离时就进行警报提示,而小于安全距离时即使在驾驶员没有来得及踩制动踏板的情况下,AEB 系统也会启动,使汽车自动制动,从而为安全出行保驾护航。

2)FCW(Forward Collision Warning),前向碰撞预警系统
前向防撞预警常用的也是采用摄像头传感器,通过拍摄前方车辆车尾形状与数据库里的形状进行比对,在搭配算法计算出可能发生碰撞的时距,提前向驾驶员发出警报。FCW 系统本身不会采取任何制动措施去避免碰撞或控制车辆,这是FCW与AEB存在的主要差异。

3)LDW(Lane Departure Warning),车道偏离预警
车道偏离预警系统主要由 HUD 抬头显示器、摄像头、控制器以及传感器组成,当车道偏离系统开启时,摄像头(一般安置在车身侧面或后视镜位置)会时刻采集行驶车道的标识线,通过图像处理获得汽车在当前车道中的位置参数,当检测到汽车偏离车道时,传感器会及时收集车辆数据和驾驶员的操作状态,之后由控制器发出警报信号,整个过程大约在 0.5 秒完成,为驾驶者提供更多的反应时间。而如果驾驶者打开转向灯,正常进行变线行驶,那么车道偏离预警系统不会做出任何提示。

4)BSD(Blind Spot Detection),盲区检测
盲点检测系统,通过车辆周围排布的防撞雷达、多普勒雷达、红外雷达等传感器、盲点探测器等设施。由计算机进行控制,在超车、倒车、换道、大雾、雨天等易发生危险的情况下随时以声、光(侧视镜上的小灯闪烁)形式向驾驶员提供汽车周围必要的信息,并可自动采取措施,有效防止事故发生。

5)LKA(Lane Keep Assistance),车道保持辅助
通过环境感知传感器识别本车相对于车道中央的位置,如果驾驶员无意间偏离车道,则应向驾驶员发出警告或通过自动转向干预使车辆重新回到车道内。

6)PDS(Pedestrian detection system),行人检测系统
车辆行驶途中可以利用摄像头雷达,和激光雷达来探测到四面行人,在安全距离内及时控速。

7)APA(Automatic Parking Assistance),自动泊车系统
泊车辅助系统通过安装在车身上的摄像头,超声波传感器,以及红外传感器,探测停车位置,绘制停车地图。

8)ACC(Adaptive Cruise Control),自适应巡航系统
在车辆行驶过程中,安装在车辆前部的车距传感器(雷达/摄像头)持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前车之间的距离过小时,ACC 控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。

9)AVM(Around View Monitoring),360°全景影像系统
通过多个(一般四个)超大广角鱼眼镜头拍摄图像,经过特殊算法对所拍摄图像进行畸变矫正以及拼接,形成物体周围的全景影像的系统。该系统多应用于车辆,实现无盲区行驶,全景泊车等功能,对安全驾驶有所帮助。
来源:上海博通检测技术
--END--

