


点击上方蓝字关注我们吧


来源:ServoMan
1. 弱磁扩速理论
PMSM弱磁的思想来源于他励直流电动机的调磁控制。我们熟知,当他励直流电动机的端电压达到最大值之后,无法再用调压调速来提高转速,只有通过降低电动机的励磁电流,从而降低励磁磁通,实现在保证电压平衡的条件下,电机速度提升到额定转速以上。
永磁同步电机的励磁磁通是由永磁体提供的,这个磁通是恒定不变的。这个时候如果我们想降低磁通强度,就只能通过增大定子电流的去磁分量来削弱气隙磁通,这样才能达到跟他励直流电动机的弱磁等效。
1.1 从公式层面来说明弱磁原理
永磁同步电机弱磁控制的本质和规律可以用电压平衡方程来说明
由公式可以看出,在电压达到最大时,要想再升高转速,就只能靠调节 id 和 iq 来实现了,这就是电机的弱磁运行方式。同时电机的电流也是有相应的限制的,增大 iq 的同时必须要减小 id,才能保持电流矢量的大小不变。一般是通过增大 id 来实现弱磁扩速的。
1.2 电压极限环的概念
从公式的推导可以得出电压极限的轨迹是一个椭圆环,电机的电压方程为:
将电压方程带入电压平衡方程,并忽略定子压降,可以得到

从这个推导的方程可以看出电压的极限轨迹是一个椭圆,椭圆的圆心是(−φf/Ld,0)。
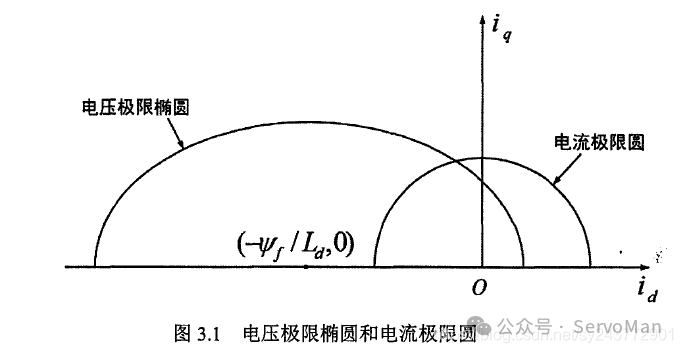
这里面有什么物理含义呢? 其实从图中可以看出,要使电机稳定的运行,电压必须处于这个电压极限椭圆的曲线内,一旦超过电机将不稳定。
1.3 电压流限环的概念
我们再来了解电流极限环的概念,永磁同步电机的电流极限可以用方程描述:
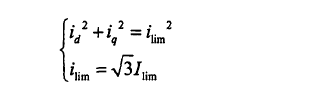
式中的 Ilim是电动机允许的最大相电流值。
有了这电流极限环的概念,我们再结合电压极限环,我们可以知道,如果要使电机稳定运行,电流矢量的终点必须落在电流极限环和电压极限环的圆之内,也就是电流矢量的终点必须落在电压极限环和电流极限环的公共区域,否则电机将无法稳定运行。
2. 如何实现弱磁扩速
有了以上的概念,我们该如何在仿真中实现弱磁呢?采用双电流调节器的超前角弱磁控制。
2.1 超前角是什么?
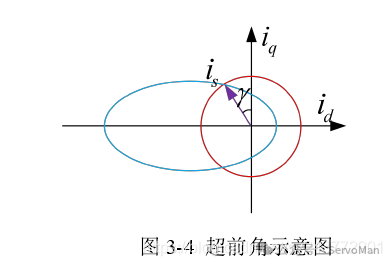
定义:超前角 γ为两相旋转坐标系dq坐标系下,定子电流矢量超前q轴的电角度。如下图所示
2.2 超前角弱磁的原理是什么?
当转速达到转折速度时,电流调节器仍然处于饱和状态,定子电压已经达到极限状态。如果我们此时通过电压反馈来调节超前角 γ 在到达额定转速后增大,直轴id的去磁电流反向增大,交轴电流iq则随之减小,随着直轴去磁电流的增大,磁通减小。以此实现在不增加逆变器容量情况下的弱磁。
2.3 超前角控制框图
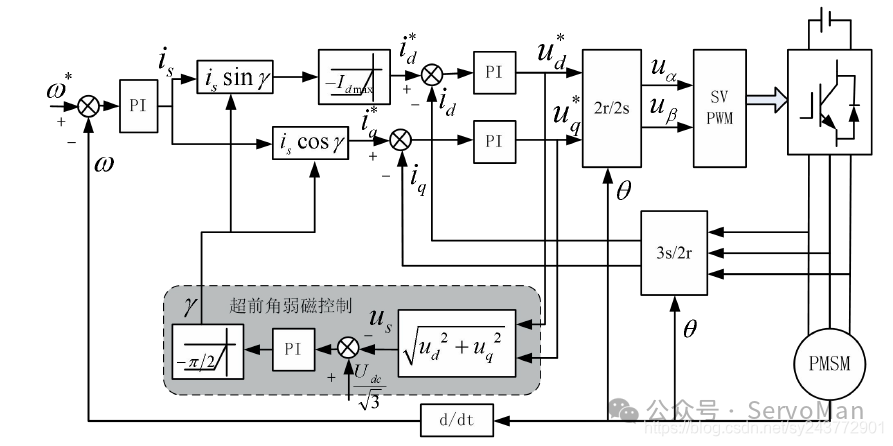
具体如何判断是否达到额定转速呢?
如上图所示,电流调节器的输出 Ud 和 Uq 作为弱磁调节器的输入量,并与逆变器所能输出的最大电压 Umax比较,二者的偏差作为弱磁环节的PI调节器的输入,PI调节器输出超前角γ来调节 iq* 和 id* 的给定。
由于采用的是SVPWM调制,U_max=U_dc/√3,此时有2种情况:
1、当√(Ud^2+Uq^2 )小于Umax时电压PI调节器正向饱和,此时超前角γ为0,电机运行在恒转矩区;
2、当√(Ud^2+Uq^2 )大于Umax时电压Pl调节器的输入值为负数,调节器开始退出饱和,输出的超前角γ为负,此时电机运行在弱磁区。
注意:超前角弱磁方式的特点在于结构简单,较易于在实验中实现,但超前角弱磁存在弱磁电流过强导致PMSM去磁的风险,在实际应用中要注意参数调试及对电流做限制。
版权声明:本文为CSDN博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
原文链接:https://blog.csdn.net/sy243772901/article/details/88077392

END


参会请联系我们
车厘子

178-5555-8148
同手机号

电动车千人会-小玖
180-1633-9809
同手机号

扫码关注
获取更多行业资讯

欢迎加入新能源汽车产业交流群
关注公众号后台回复关键词“社群”
即可获取入群方式
 点击“阅读全文”,报名参加峰会
点击“阅读全文”,报名参加峰会
【免责声明】文章为作者独立观点,不代表电动车千人会立场。如因作品内容、版权等存在问题,请于本文刊发30日内联系电动车千人会进行删除或洽谈版权使用事宜
