

一台可以在谈起价格你会觉得缺点不是缺点的机器。 yunswj说的
21年的时候还在上学,想要个无人机,我爸赞助了一台。感谢我爸,他虽然不懂这些,但还是会支持我的想法。都2021年了,还能入手Dji Mavic Air吗? 说实话也吃灰了,但是AIR的可玩性非常高,他是唯一一个支持WINDOES SDK的机器,就是精灵4 RTK这些机型的才会支持。而且还有WIFI图传,还支持DJI googlos眼镜,总之🐂🍺。
后来MINI1的时候想买,但是清一色的动力不足,有风就会飘,还WIFI图传就几百米什么的,而且价格也是1K+,性价比实在是低。
后来出现了MINI2,和MINI一样的外壳,体积重量,但是动力不足的问题已经基本上解决了,至少是可以扛到5级风,就是10m/s的样子。但是价格又到了2K左右,这个时候就不如买前面的旗舰机了。
但是之后的MINI 3,4这些我就觉得有点极端了,不过下一台我想买MINI3PRO。
买一个东西,就看能不能接受它的缺点:我觉得动力还是弱,这样会导致飞行的场景有限,就是无风晴朗最好。接着是避障的缺失,如果操作不慎会有更多的炸鸡风险,所以场景还是有些单一,在不能目视的情况下就不能自主飞行。
优点呢?
1K出头的售价,有OS2代图传,实测25min+的续航,最高4K@30fps的云台,还可以直播串流,甚至还有SDK。

好,流吧

这个按语有种江郎才尽的感觉,hhh

IOS和安卓的开发SDK
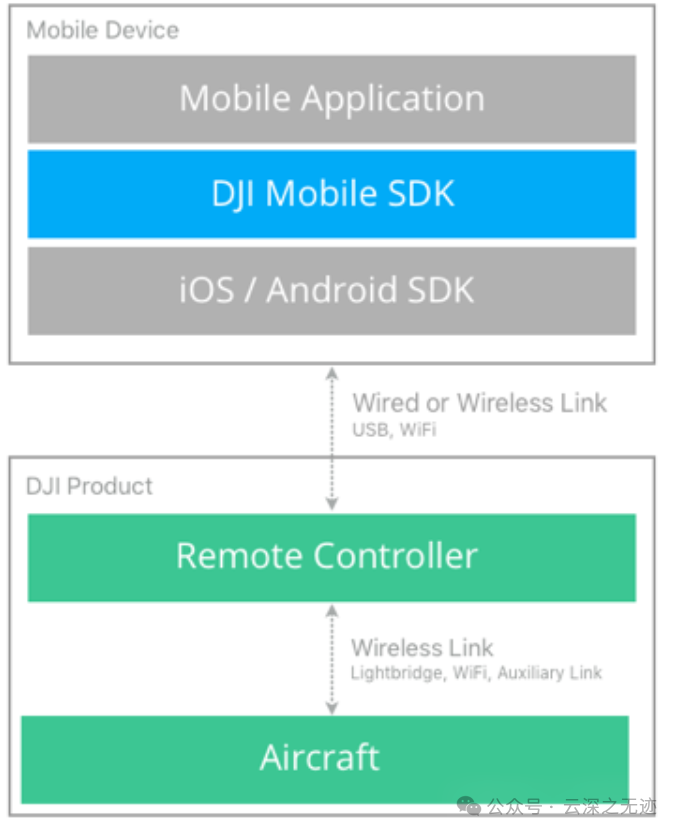
我想写一个东西,可以在SDK上面再有一层,可以通过Python或者C++等语言来控制机器,因为我觉得这个机器太适合搞教育那帮人使用了。

兄弟俩
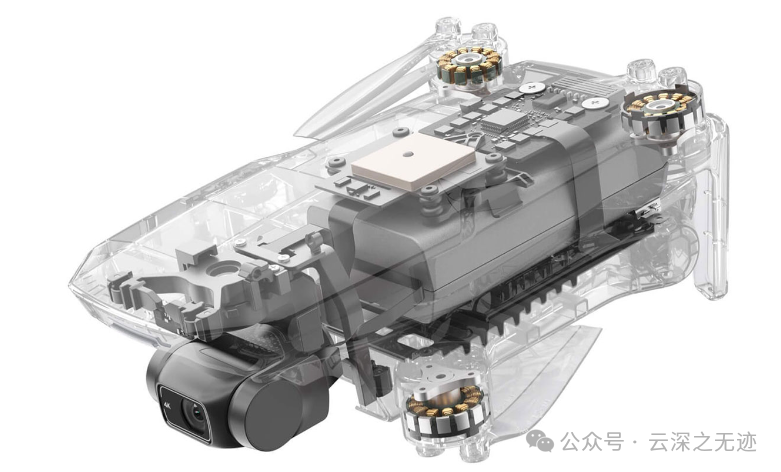
耶耶耶,找到一个好看的图

避障方面,DJI Mini 3 Pro 是目前Mini系列中唯一配备前、后、下三向双目视觉传感器的无人机,而Mini 3和Mini 2 SE仅支持下视避障。但Mini系列三款无人机都支持智能返航、低电量返航和失控返航三种模式,为用户提供了更多的安全性保障。在图传方面,DJI Mini 3 Pro使用了DJI O3的图传方案,在SRRC标准下,最大信号有效距离为8公里,略远于使用DJI O2图传方案的Min 3和Mini 2 SE,且遥控器端的实时图传质量也会略好于Min 3和Mini 2 SE。
DJI Mini 2和DJI Mini 2 SE没有什么区别,根本就分辨不出,但大疆Mini 2 SE相较于Mini 2在折叠状态下更小、更轻。
具体来说,Mini 2 SE在折叠状态下的长度为138毫米,宽度为81毫米,高度为58毫米;而Mini 2在折叠状态下的长度为124毫米,宽度为86毫米,高度为57毫米。同时,Mini 2 SE的重量也更轻,仅为246克,使得携带和使用更加方便。
大疆mini se和mini2采用的都是3轴增稳机械云台,角度控制精度±0.01°,可控转动范围:俯仰:-90°至0°,然后大疆mini se控制转速可达120°/s,可带来4公里高清图传。而mini2控制转速可达100°/s,可带来10公里高清图传。

这个机器就是MINI2+4K=MINI 4K
可以看到MINI2 SE是主推的

电池贴纸都是这个

机臂是MINI 4K
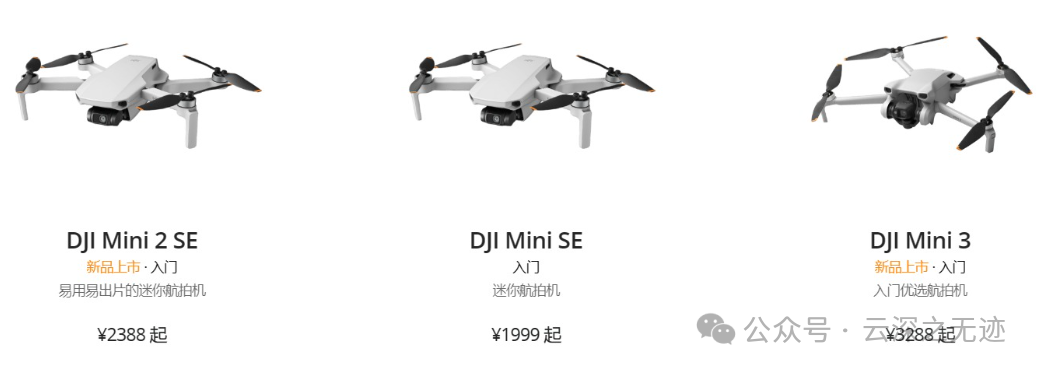
大疆的产品线,缺少2500元以下的产品了。不是所有人都能轻松拿出3000元,但几乎每个人都有“蓝天梦"
MINI1直接把晓拍死在了沙滩上。晓曾经让友商的竞品无人机,因为没有云台沦为玩具。
而大疆的mini1,对晓的全面超越但价格只增加了200,让晓也沦为了玩具。mini1树立了入门无人机的全新标杆。
时至今日,其实友商也拿不出真正可以挑战mini1的产品。mini1的性能、续航时间和图传质量是在如此便携且仅249g的情况下实现的,任何一家厂商都无法实现如大疆这般的整合能力。
Mini1并不"完美”,它图传还是太近、抗风不好、没有4K视频,但时至今日,也可以说它没有对手(除了mini2)。

南京我记得是

MINI 3 有竖拍功能

头转了
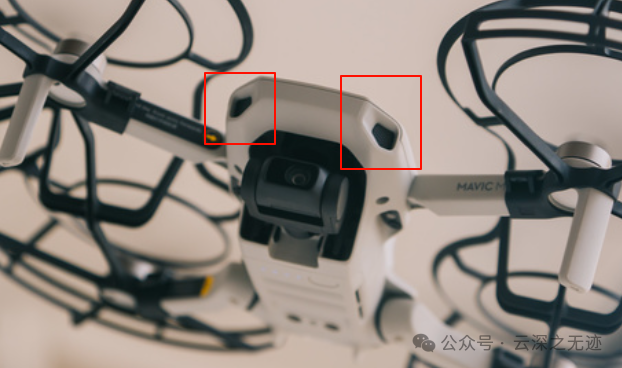
这个MINI的上面都是空的,可以改转

有个评测是可以把350g 的水瓶提升到将要离地的地步
Insta360 One R全景版(加上配件将近200g)绑在了Mini2上,是完全可以带动起飞的。
所以这种200+g的载重完全可以加一些外设来满足教育无人机的编程需求,不过下摄像头打不开也是真的。
所以加一个避障系统也是很有意思的工作!!!避障有三类:
一是感知障碍物并停止阶段;
二是获取障碍物深度图像自主绕开阶段;
三是建立区域地图合理规划路径阶段。、

我去看了看2S的避障参数
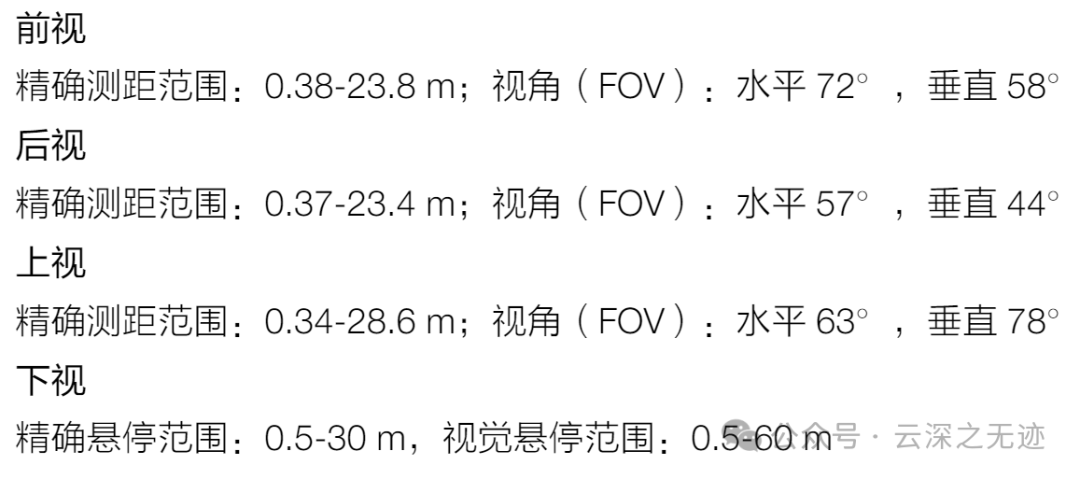
就先看前面的
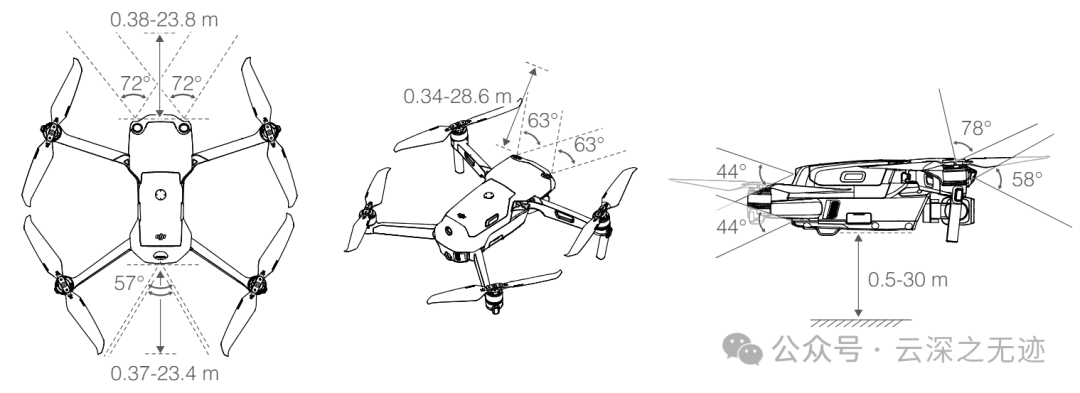
看这个角度
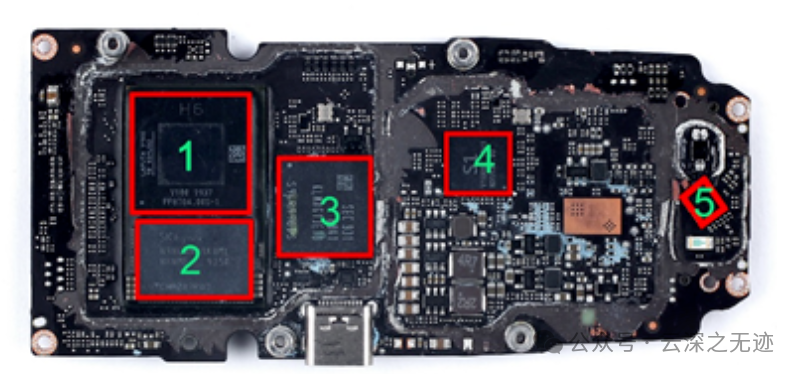
AIR2的前避障是TI的

还在供货
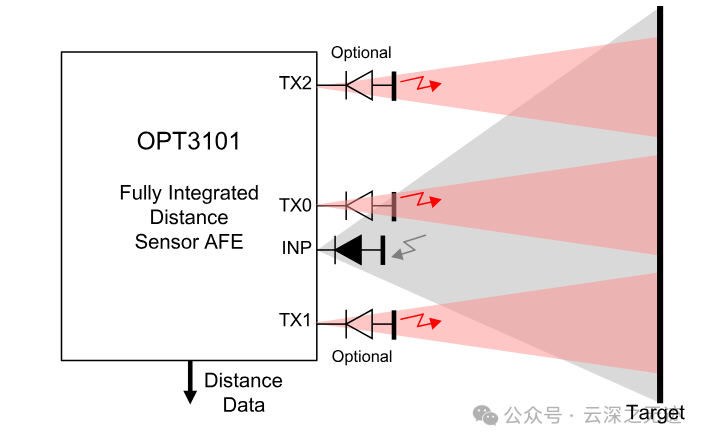
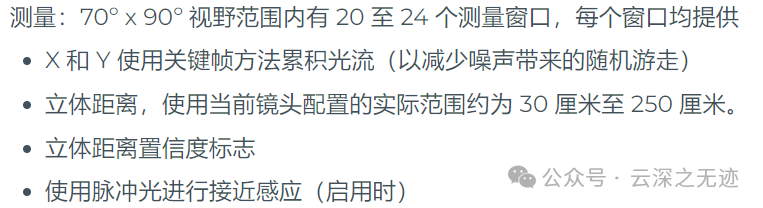
一个测量的示意图
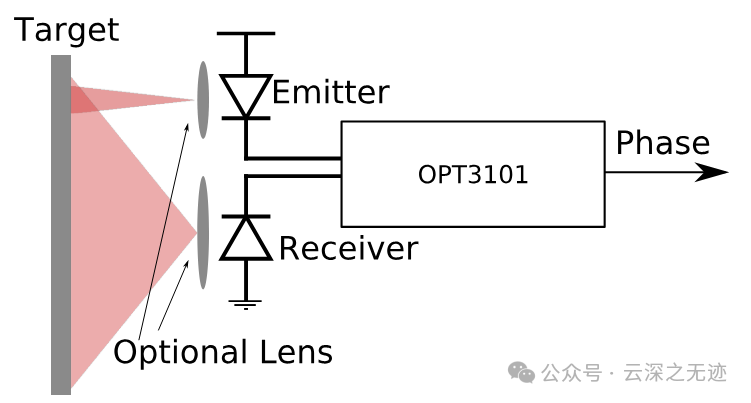
单通道
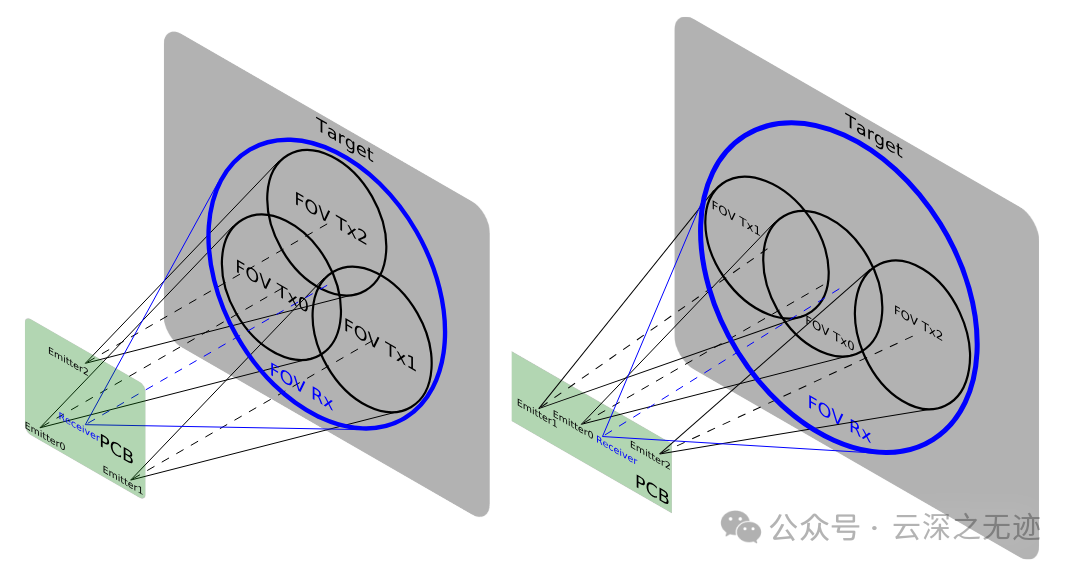
可以通过前端的不同设置来获得更多的探测空间

可以看到两组4个,前向的避障系统
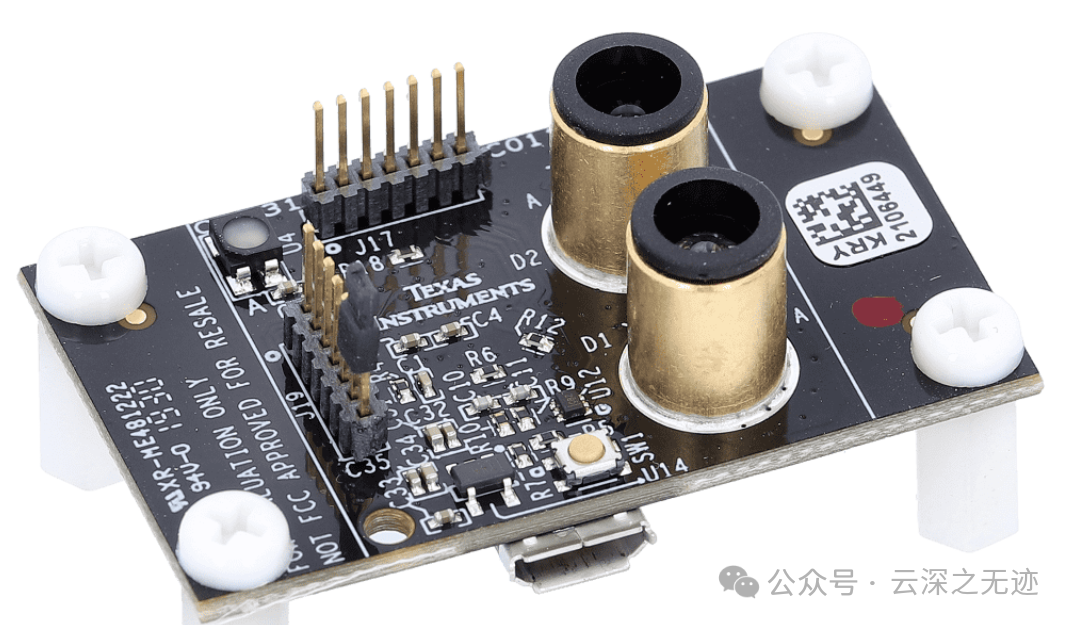
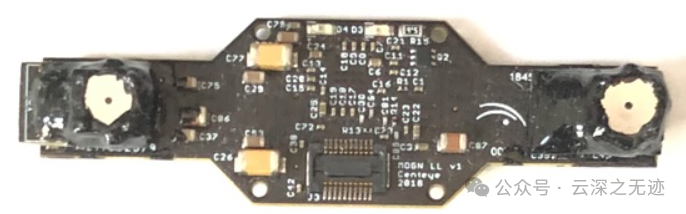
看看TI的板子是什么样的
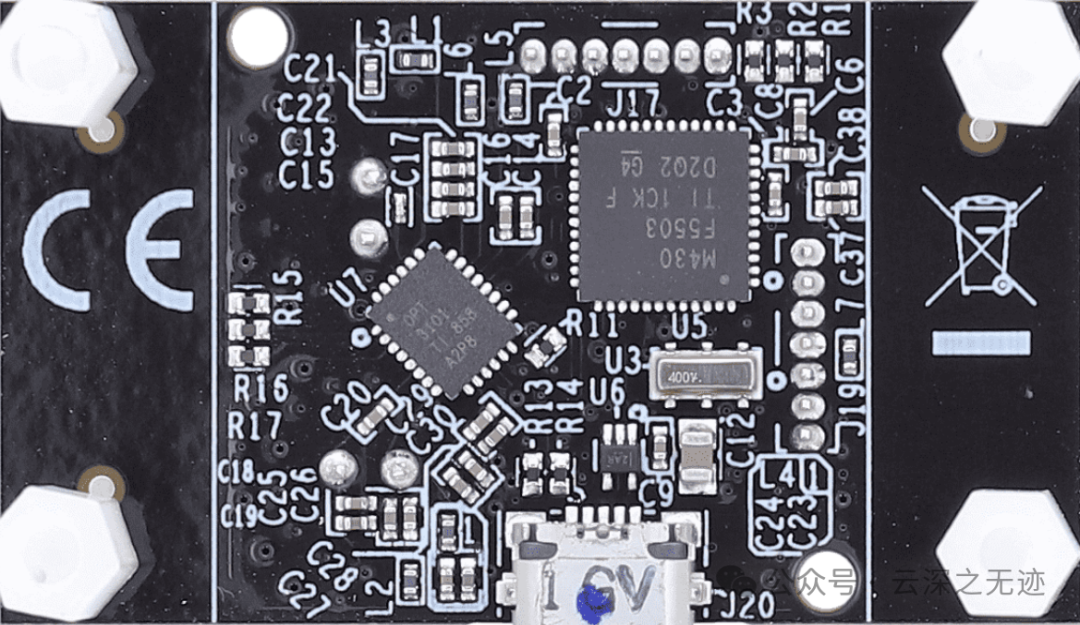
背面是处理芯片
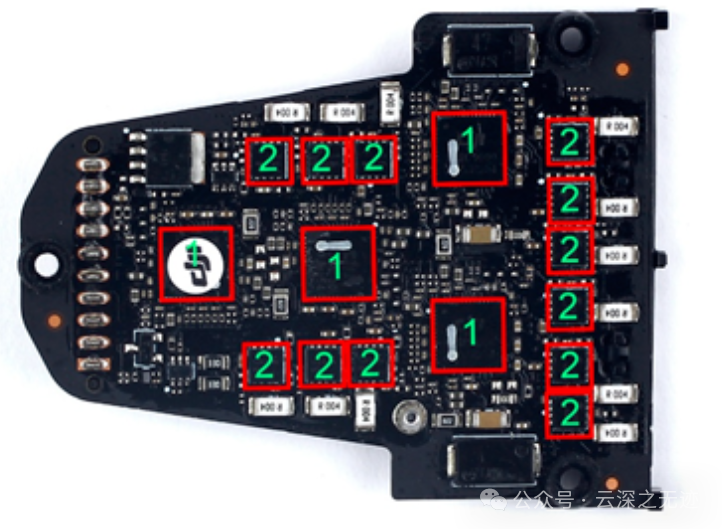
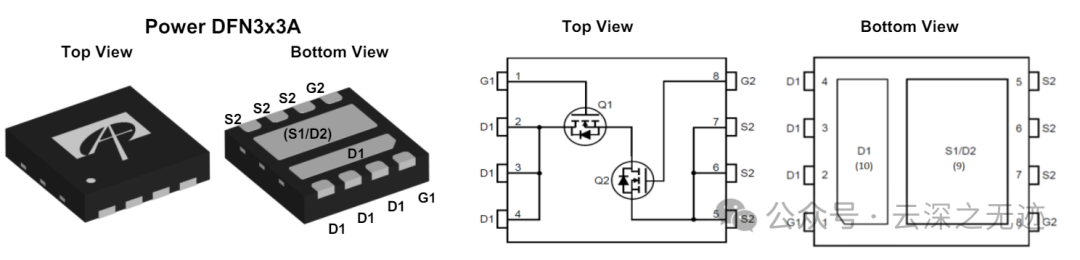
这个是NMOS

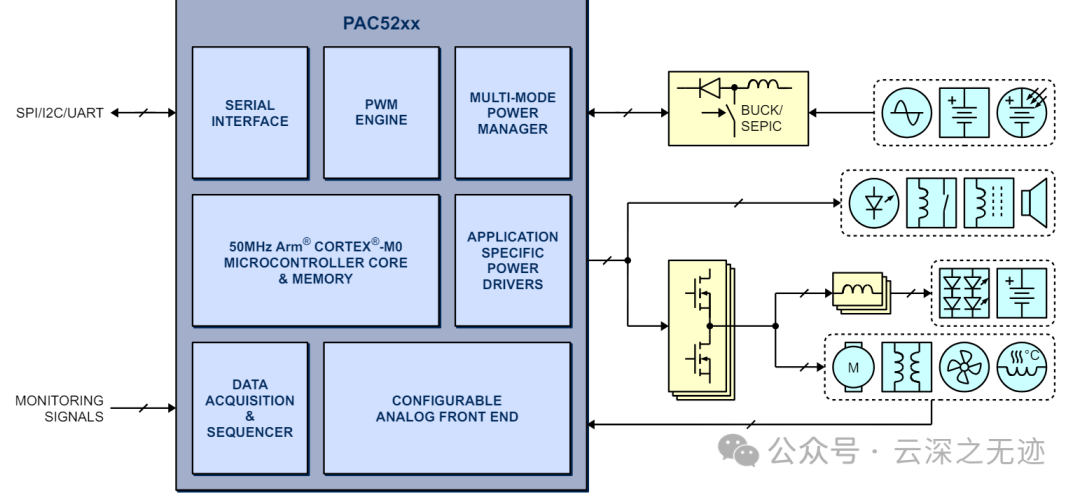
每一个电机都要有一个PAC52来控制MOS
翻过来
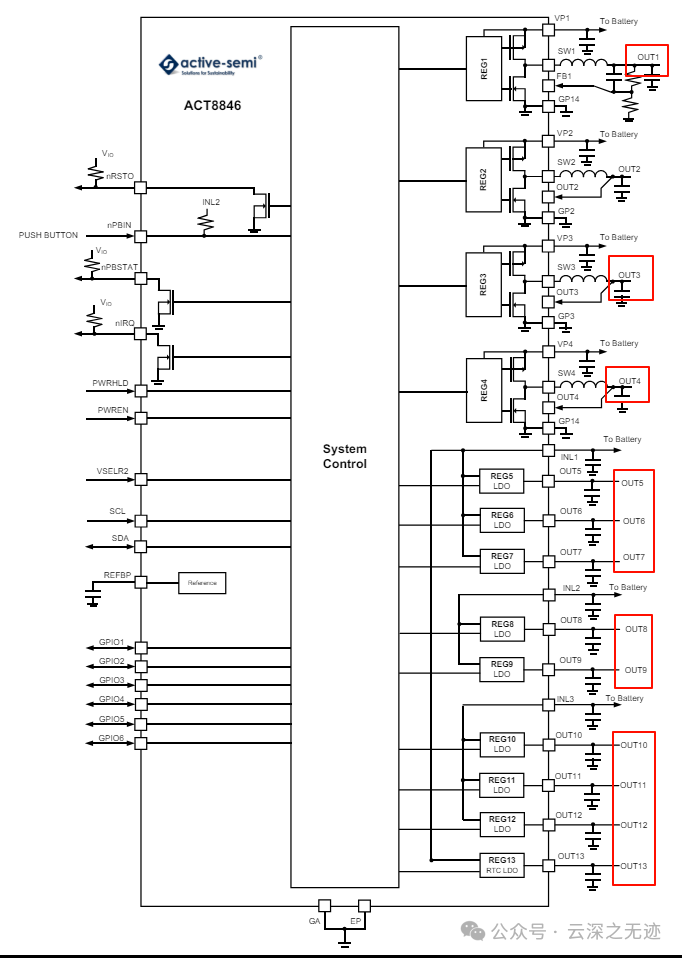
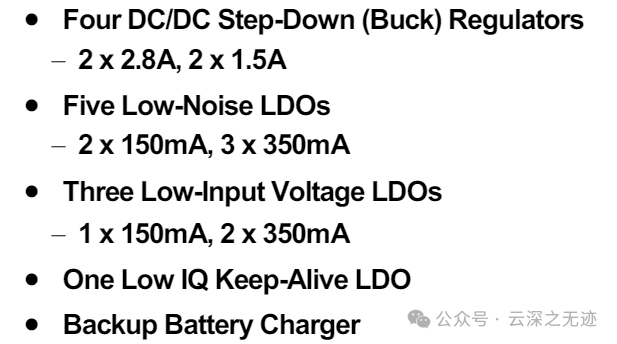
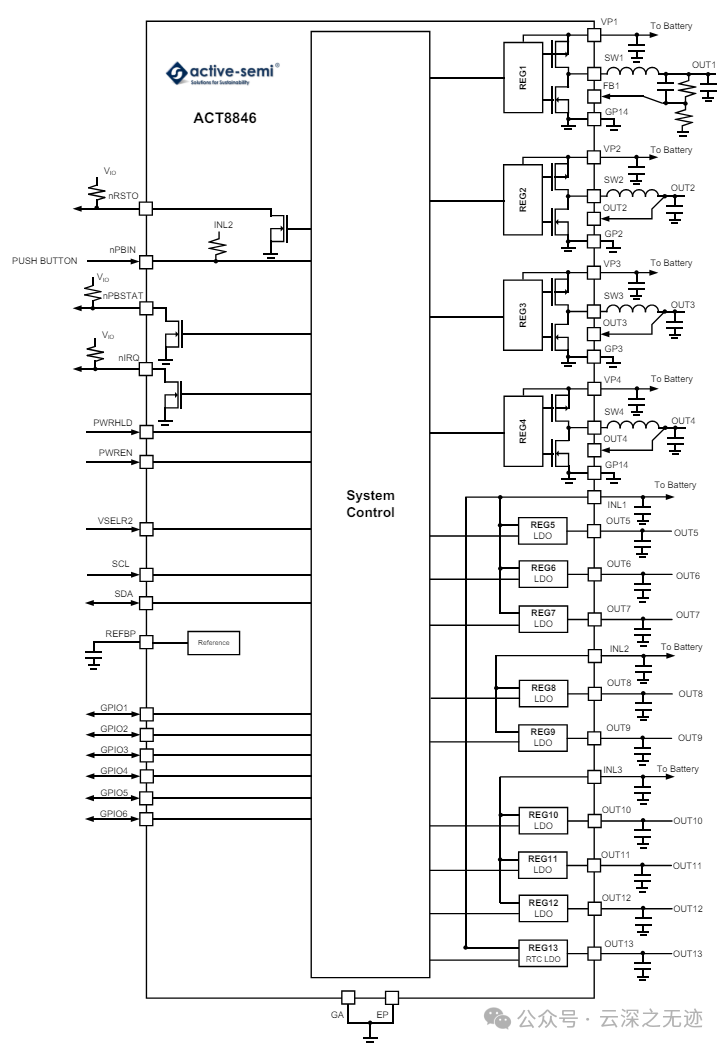
因为无人机上面的器件众多,所以就需要一个多通道的PMIC,你看这个通道有多少。
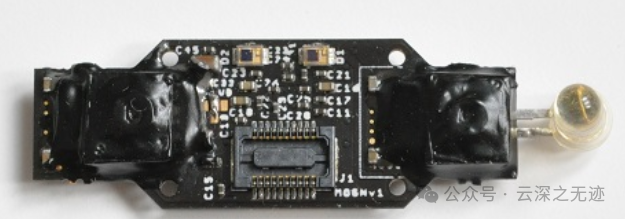
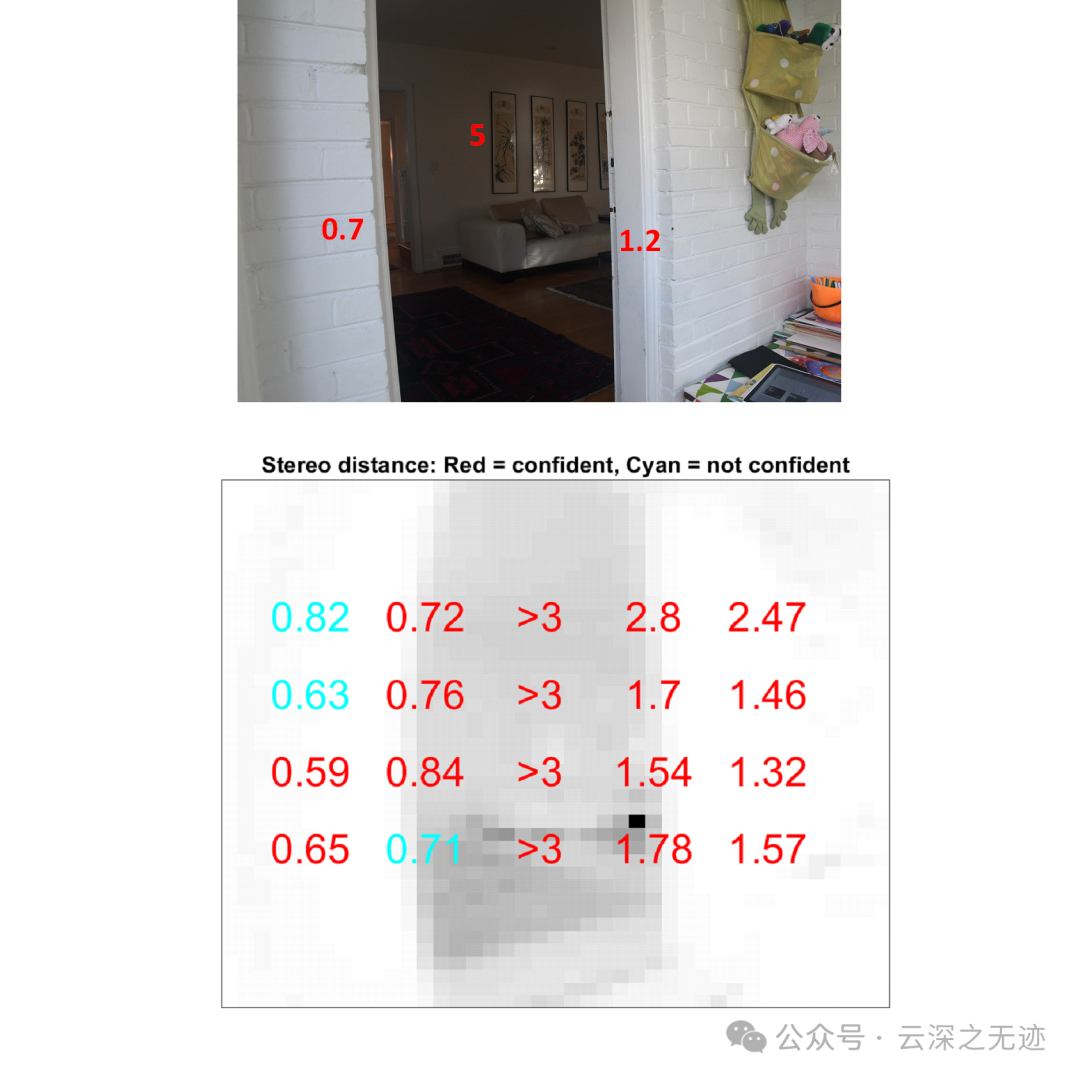
是红外的测量系统
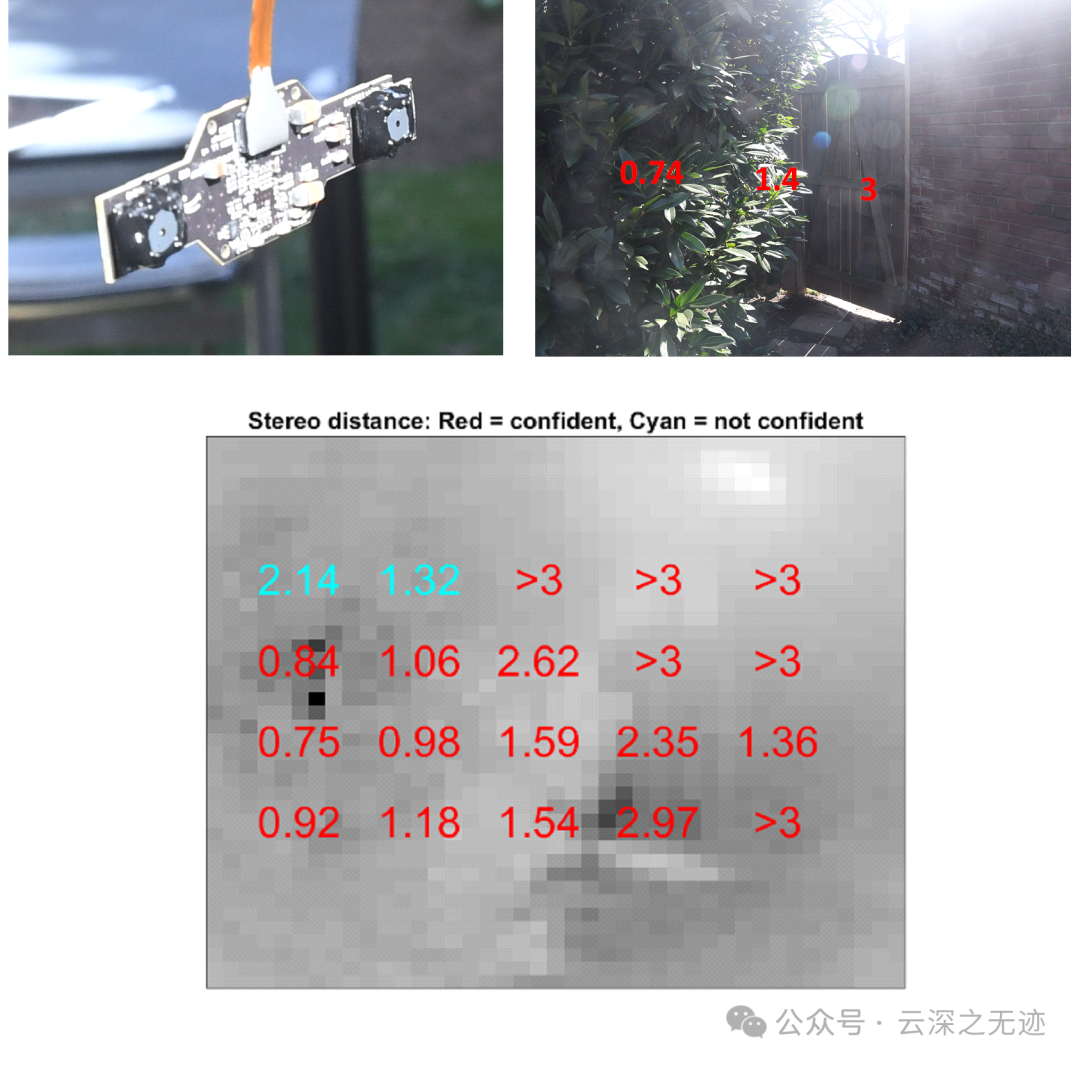 左上:太阳中的传感器图片
左上:太阳中的传感器图片

令人难过,互联网上面我发布了大量关于TT的技术文章,全国各地不少老师都联系我问过不少问题,至今
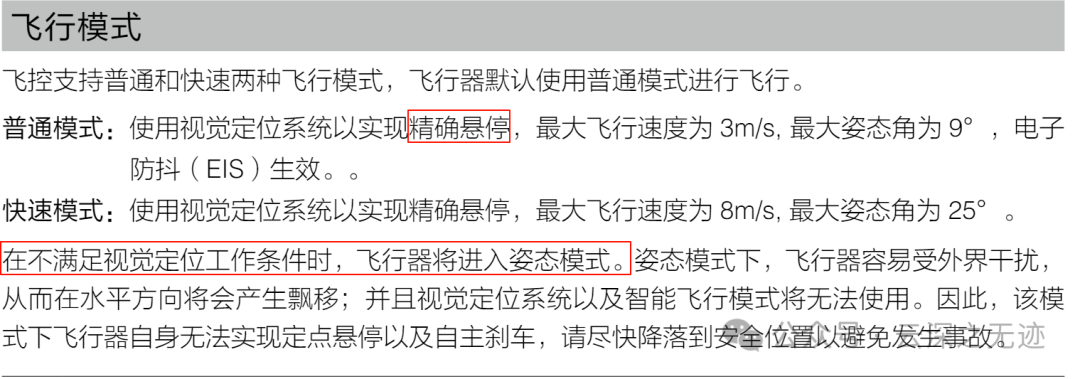
说起改装就不得不说姿态模式了:

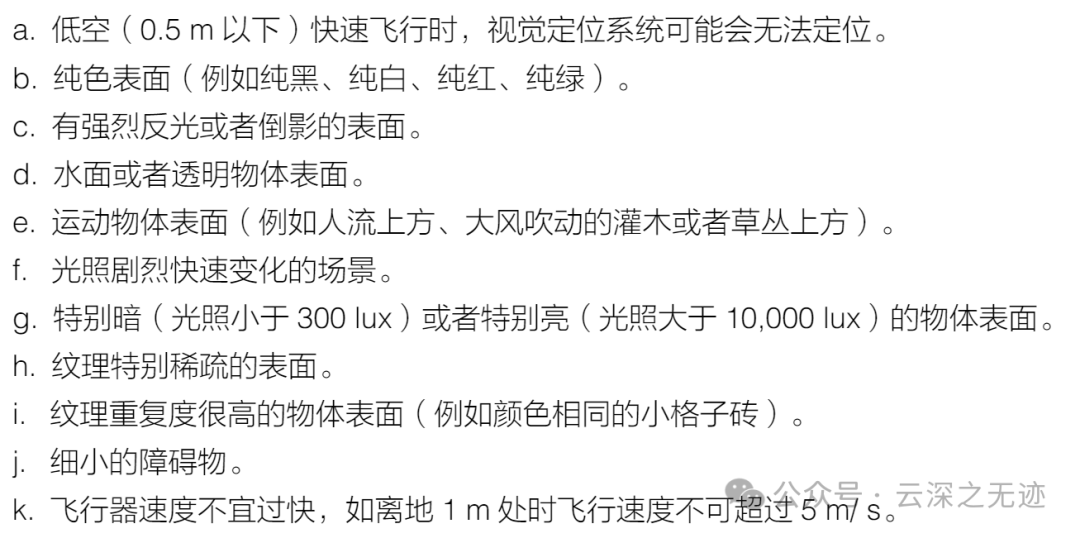
当无人机在没有GPS信号或GPS信号不佳的环境,多方位视觉系统无法精准定位时,无人机就会进入姿态模式。 在姿态模式下,无人机飞控系统仅提供姿态増稳。 实际操作中,无人机会明显的出现漂移,无法悬停,需要飞手通过遥控器来不断修正无人机的位置。
当GPS信号失效或指南针异常的时候,只通过飞机内置的气压计、陀螺仪等传感器保持飞行高度,此时由于不能精准定位,也就只能简单平衡飞机的水平姿态,这也就是我们平时所说的“姿态增稳”了。这时各桨分配的电调电压是相同的,但各桨的阻力是不同的(有自然磨损、进入尘土等因素),再加上风力气流的影响,也就产生了我们经常看到的“漂移”,需要手动控制飞机水平姿态。
为什么有姿态模式?
一方面是因为在专业级航拍创作中,有些飞手会选择姿态模式进行拍摄,因为GPS模式下,一旦不小心松开俯仰杆、横滚杆,无人机会反向倾斜刹车,导致拍摄画面不够顺畅,
当无人机朝一个方向漂移时,向相反反向打杆使其回到初始位置!

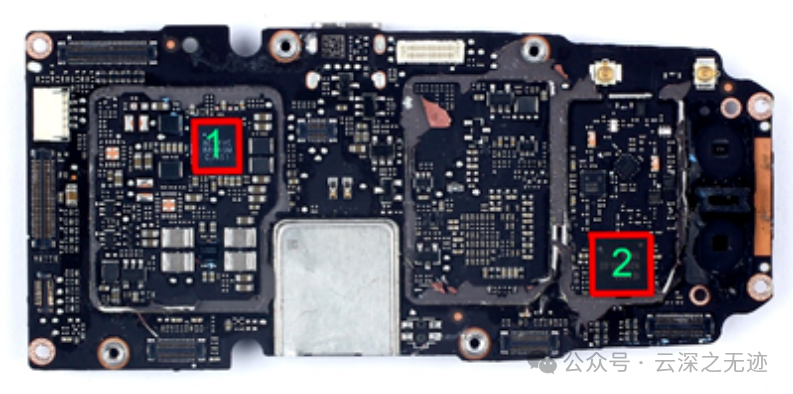
害,这是我以前保存的文章,可以看到上面大量的芯片

视觉定位,是intel的Movidius
TT续航8+,这个是PMIC的一角
也是需要大量的LDO
下面看一个有趣的改装:



装在FPV机型的前面
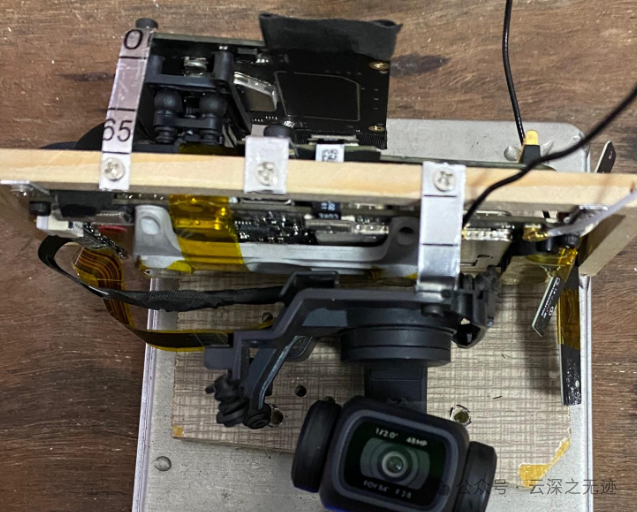
改装的样子
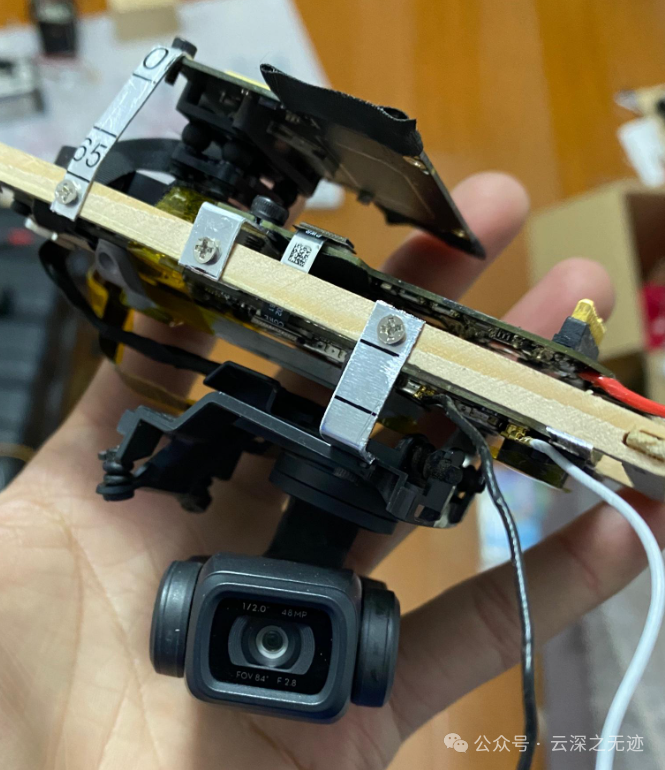
全景

样子

高性能的数字图传

装的样子
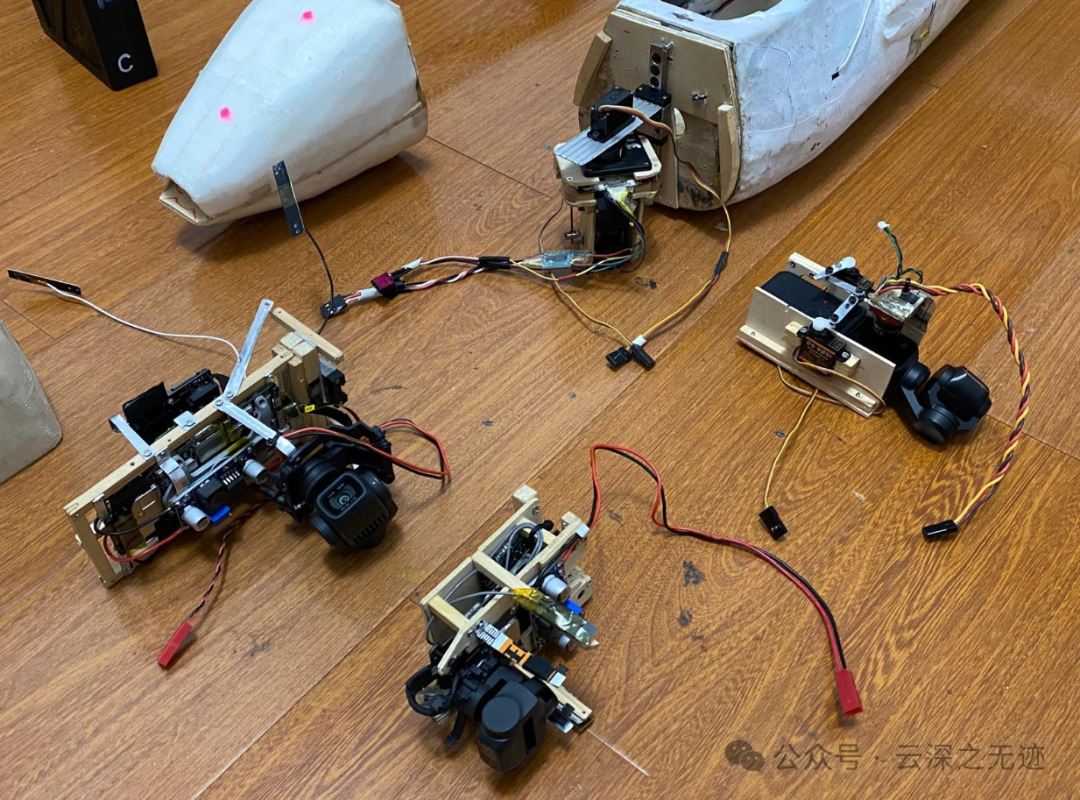
三套

小机器没有避障,好好保护

看一个设计,可以适应更多的环境

投掷器,但是太重了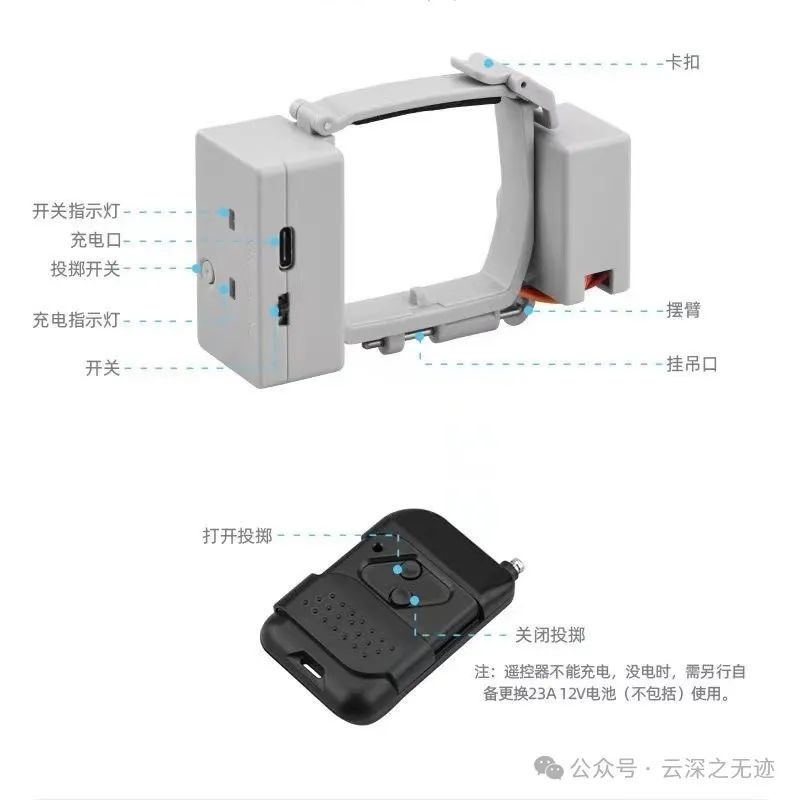
比较有意思
另外一种
我不太确认是不是后面会好一些,但是今天普遍涨了300
如果SDK的转换工作我可以完成,那教育市场就不需要重新设计机器了,直接开发下视觉系统和传感器融合系统就好了。

https://m.youuav.com/news/detail/202001/38945.html