
电机:俗称“马达”,依据电磁感应定律实现电能转换或传递的一种电磁装置。包括:电动机和发电机。
电动机在电路中是用字母M表示,它的主要作用是产生驱动转矩;作为用电器或各种机械的动力源,发电机在电路中用字母G表示,它的主要作用是利用机械能转化为电能。
电机控制:对电机的启动、加速、运转、减速及停止进行的控制。

直流有刷电机(Brushed DC,简称BDC),由于其结构简单,操控方便,成本低廉,具有良好的偏动和调速性能等优势,被广泛应用于各种动力器件中,小到玩具,按钮调节式汽车座椅,大到印刷机械等生产机械中都能看到它的身影。
直流电源的电能通过电刷和换向器进入电枢绕组,产生电枢电流,电枢电流产生的磁场与主磁场相互作用产生电磁转矩,使电机旋转带动负载。
优点:价格低、控制方便
缺点:由于电刷和换向器的存在,有刷电机的结构复杂,可靠性差,故障多,维护工作量大,寿命短,换向火花易产生电磁干扰。

步进电机就是一种将电脉冲转化为角位移的执行机构;更通俗一点讲:当步进驱动器接收到个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度。我们可以通过控制脉冲的个数来控制电机的角位移量,从而达到精确定位的目的;同时还可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
优点:控制简单,低速扭矩大,成本低;
缺点:步进电机存在空载启动频率,所以步进电机可以低速正常运转,但若高于一定速度时就无法启动,并伴有尖锐的啸叫声;同时,步进电机是开环控制,控制精度和速度都没有伺服电机那么高。

伺服电机广泛应用于各种控制系统中,能将输入的电压信号(或者脉冲数)转换为电机轴上的机械输出量,拖动被控制元件,从而达到控制目的。伺服电机系统见下图。一般地,要求转矩能通过控制器输出的电流进行控制;电机的反应要快、体积要小、控制功率要小。伺服电机主要应用在各种运动控制系统中,尤其是随动系统。
伺服电机有直流和交流之分,最早的伺服电机是一般的直流有刷电机,在控制精度不高的情况下,才采用一般的直流电机做伺服电机。当前随着永磁同步电机技术的飞速发展,绝大部分的伺服电机是指交流永磁同步伺服电机或者直流无刷电机。
优点:可使控制速度,位置精度非常准确,效率高,寿命长。
缺点:控制复杂,价格昂贵,需要专业人士才能控制。

直流无刷电机与伺服电机有类似的优缺点。BLDC电机比PMSM电机造价便宜一些,驱动控制方法简单一些。


电机线圈是有铜导线绕线而成的,所以其电机电枢绕组电阻一般都是非常小这样回路中电流一般都是比较大的。这对我们电机驱动设计有很大的影响。
如果不需要正反转控制(单向旋转),可以用下图驱动电路,实现电机单向控速。



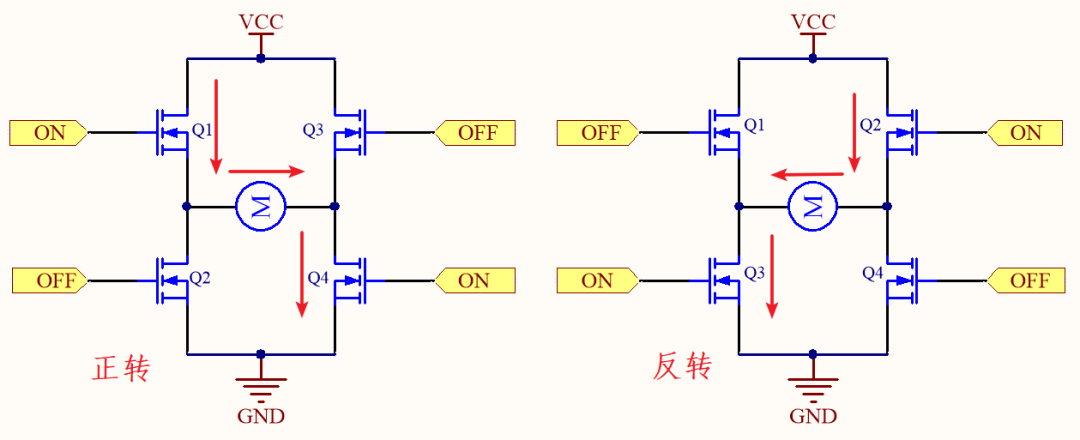
驱动电机时,保证H桥两个同侧的MOS管不会同时导通非常重要,如果MOS管Q1和Q2同时导通,那么电流就会从电源正极穿过两个MOS管直接回到负极,此时电路中除了MOS管外没有其它任何负载,因此电路上的电流就达到最大值,烧坏MS管和电源。Q3和Q4同时导通是同样的道理。
简单的开关只能控制电机正反转,引入PWM控制可以实现方向和速度调节。调节占空比实现控速,占空比越大平均电压(电流)越大,速度越快PWM频率一般在10KHz~20KHz之间。频率太低会导致电机转速过低,噪声较大。频率太高,会因为MOS管的开关损耗而降低系统的效率。
优点:控制电路简单。
缺点:不能刹车,不能能耗制动,在负载超过设定速度时不能提供向力矩。调速静差大,调速性能很差,稳定性也不好。
优点:启动快,能加速,刹车,能耗制动,能量反馈,调速性能不如双极模式好,但是相差不多,电机特性也比较好。在负载超速时也能提供反向力矩。
缺点:刹车时,不能减速到0,速度接近0速度时没有制动力。不能突然倒转。动态性能不好,调速静差稍大。

PWM和PWMN是互补的PWM信号,一般用高级控制定时器的通道和互补通道控制。在PWM为高电平时:MOS管1和4都导通,MOS管2和3都截止,电流从电源正极,经过MOS管1,从左到右流过电机、然后经过MOS管4流入电源负极。在PWM为低电平时:MOS管2和4都导通,MOS管1和3都截止,根据楞次定律,存在自感电动势,电流还是从左到右流过电机,经过MOS管4和MOS管2形成电流回路。
优点:能正反转运行,启动快,调速精度高,动态性能好,调速静差小,调速范围大,能加速,减速,刹车,倒转,能在负载超过设定速度时,提供反向力矩,能克服电机轴承的静态摩擦力,产生非常低的转速。
缺点:控制电路复杂。在工作期间,4个MOS管都处于工作状态,功率损耗大,电机容易发烫。

H桥中一般使用4个N型MOS管来搭建。不用2个N型MOS管+2个P型MOS管的原因是:P型MOS管难做到高耐压大电流的型号,导通电阻大。同样性能的MOS,N型比P型便宜。
对于NMOS,当外部给的栅源极Vgs电压大于芯片的Vgs阈值(大部分在2V-10V之间)时,漏极D和源极S之间直接导通。如果外部给的Vgs电压小于阈值,漏极D和源极S之间截止。
简单认为,就是一个由栅极G电压控制的一个开关。

假设图中N-MOS管的Vgs阈值为3V,VCC=24V。
上桥臂Q1 MOS管无法直接使用STM32芯片引脚使其导通,因为假设Q1导通,漏极D和源极S电压几乎相等(Rds非常小),即VA=VCC=24V,这样要求Vg>=VA+Vgs=27V。简单来说就是,Vg大于27V,Q1导通,小于27V,Q1截止。所以就需要一个这样的电路:把STM32的3.3VPWM信号升压到27V电压上,这个电路可以用自举电路来实现。

上桥臂驱动:自举电路
实际电路设计中,一般把Vgs设置为10~20V,因为这样保证MOS管完全导通。

所谓半桥驱动芯片,便是一块驱动芯片只能用于控制H桥一侧的2个MOS管。因此采用半桥驱动芯片时,需要两块该芯片才能控制一个完整的H桥。
相应的,全桥驱动芯片便是可以直接控制4个MOS管的导通与截止,一块该芯片便能完成一个完整H桥的控制。
这里使用的IR2104便是一款半桥驱动芯片,因此在原理图中可以看到每个H桥需要使用两块此芯片。


VCC为芯片的电源输入,手册中给出的工作电压为10~20V。
IN和SD作为输入控制,可共同控制电机的转动状态(转向、转速和是否转动)。
VB和VS主要用于形成自举电路。
HO和LO接到MOS管栅极,分别用于控制上桥臂和下桥臂MOS的导通与截止。
COM脚直接接地即可。
此部分是理解该芯片的难点,需要进行重点讲解。从上面的典型电路图和最初的设计原理图中均可发现:该芯片在Vcc和VB脚之间接了一个二极管,在VB和VS之间接了一个电容。这便构成了一个自举电路。
因为下桥臂MOS源极接地,想要导通只需要令其栅极电压大于开启电压Vth。而上桥臂MOS源极接到负载,如果上桥臂MOS导通,那么其源极电压将上升到H桥驱动电压也就是MOS的供电电压,此时如果栅极对地电压不变,那么Vgs可能小于Vth,又关断。因此想要使上桥臂MOS导通,必须想办法使其Vgs始终大于或一段时间内大于Vth(即栅极电压保持大于MOS管的电源电压+Vth)。

自举电路工作流程:
以下电路图均只画出半桥,另外一半工作原理相同因此省略。假定Vcc=12V,VM=7.4V,MOS管的开启电压Vth=6V(不用LR7843的2.3V)。



注意:因为此时电容在持续放电,压差会逐渐减小。最后,电容正极对地电压(即上桥臂MOS栅极对地电压)会降到Vcc,那么上桥臂MOS的栅源电压便≈Vcc-VM=12V-7.6V=4.4V< Vth=6V,高端MOS仍然会关断。
但是,在对上面的驱动板进行实际测试时会发现,不需要令其上下桥臂MOS轮流导通也可以正常工作,这是因为即使自举电容放电结束,即上桥臂MOS的栅源电压下降到4.4V仍然大于LR7843的Vth=2.3V。
那么在上述驱动板中,自举电路就没有作用了吗?当然不是,由于MOS管的特性,自举电路在增加栅源G电压的同时,还可令MOS管的导通电阻Rds减小,从而减少发热损耗,因此仍然建议采用轮流导通的方式,用自举电容产生的大压差使MOS管导通工作。


往期好文合集


