多路复用IO (IO multiplexing) 是指内核一旦发现进程指定的一个或者多个IO条件准备读取,它就通知该进程。在Linux系统中,常用的 多路复用IO 手段有 select、poll 和 epoll。
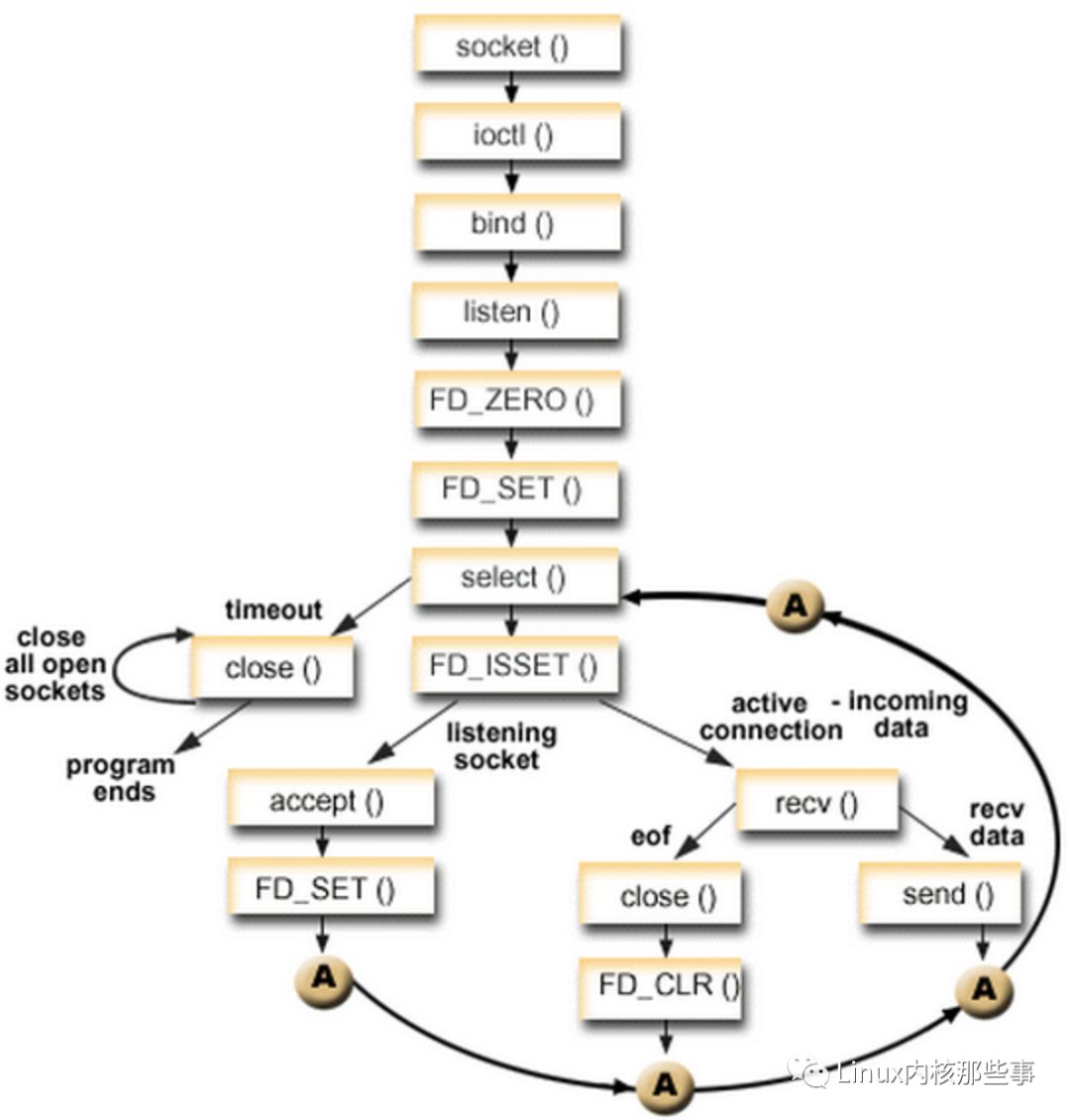
多路复用IO 主要用于处理网络请求,例如可以把多个请求句柄添加到 select 中进行监听,当有请求可进行IO的时候就会告知进程,并且把就绪的请求句柄保存下来,进程只需要对这些就绪的请求进行IO操作即可。下面通过一幅图来展示 select 的使用方式(图片来源于网络):
为了更简明的解释 多路复用IO 的原理,这里使用 select 系统调用作为分析对象。因为 select 的实现比较简单,而现在流行的 epoll 由于处于性能考虑,实现则比较复杂,不便于理解 多路复用IO 的原理,当然当理解了 select 的实现原理后,对 epoll 的实现就能应刃而解了。
要使用 select 来监听socket是否可以进行IO,首先需要把其添加到一个类型为 fd_set 的结构中,然后通过调用 select() 系统调用来进行监听,下面代码介绍了怎么使用 select 来对socket进行监听的:
int socket_can_read(int fd)
{
int retval;
fd_set set;
struct timeval tv;
FD_ZERO(&set);
FD_SET(fd, &set);
tv.tv_sec = tv.tv_usec = 0;
retval = select(fd+1, &set, NULL, NULL, &tv);
if (retval < 0) {
return -1;
}
return FD_ISSET(fd, &set) ? 1 : 0;
}
通过上面的函数,可以监听一个socket句柄是否可读。
接下来我们分析一下 select 系统调用的实现,用户程序通过调用 select 系统调用后会进入到内核态并且调用 sys_select() 函数,sys_select() 函数的实现如下:
asmlinkage long
sys_select(int n, fd_set *inp, fd_set *outp, fd_set *exp, struct timeval *tvp)
{
fd_set_bits fds;
char *bits;
long timeout;
int ret, size;
timeout = MAX_SCHEDULE_TIMEOUT;
if (tvp) {
time_t sec, usec;
...
if ((unsigned long) sec < MAX_SELECT_SECONDS) {
timeout = ROUND_UP(usec, 1000000/HZ);
timeout += sec * (unsigned long) HZ;
}
}
if (n > current->files->max_fdset)
n = current->files->max_fdset;
ret = -ENOMEM;
size = FDS_BYTES(n);
bits = select_bits_alloc(size);
fds.in = (unsigned long *)bits;
fds.out = (unsigned long *)(bits + size);
fds.ex = (unsigned long *)(bits + 2*size);
fds.res_in = (unsigned long *)(bits + 3*size);
fds.res_out = (unsigned long *)(bits + 4*size);
fds.res_ex = (unsigned long *)(bits + 5*size);
if ((ret = get_fd_set(n, inp, fds.in)) ||
(ret = get_fd_set(n, outp, fds.out)) ||
(ret = get_fd_set(n, exp, fds.ex)))
goto out;
zero_fd_set(n, fds.res_in);
zero_fd_set(n, fds.res_out);
zero_fd_set(n, fds.res_ex);
ret = do_select(n, &fds, &timeout);
...
set_fd_set(n, inp, fds.res_in);
set_fd_set(n, outp, fds.res_out);
set_fd_set(n, exp, fds.res_ex);
out:
select_bits_free(bits, size);
out_nofds:
return ret;
}
sys_select() 函数主要把用户态的参数复制到内核态,然后再通过调用 do_select() 函数进行监听操作, do_select()函数实现如下(由于实现有点复杂,所以我们分段来分析):
int do_select(int n, fd_set_bits *fds, long *timeout)
{
poll_table table, *wait;
int retval, i, off;
long __timeout = *timeout;
...
poll_initwait(&table);
wait = &table;
if (!__timeout)
wait = NULL;
retval = 0;
上面这段代码主要通过调用 poll_initwait() 函数来初始化类型为 poll_table 结构的变量 table。要理解 poll_table结构的作用,我们先来看看下面的知识点:
因为每个socket都有个等待队列,当某个进程需要对socket进行读写的时候,如果发现此socket并不能读写, 那么就可以添加到此socket的等待队列中进行休眠,当此socket可以读写时再唤醒队列中的进程。
而 poll_table 结构就是为了把进程添加到socket的等待队列中而创造的,我们先跳过这部分,后面分析到socket相关的知识点再来说明。
我们接着分析 do_select() 函数的实现:
for (;;) {
set_current_state(TASK_INTERRUPTIBLE);
for (i = 0 ; i < n; i++) {
...
file = fget(i);
mask = POLLNVAL;
if (file) {
mask = DEFAULT_POLLMASK;
if (file->f_op && file->f_op->poll)
mask = file->f_op->poll(file, wait);
fput(file);
}
这段代码首先通过调用文件句柄的 poll() 接口来检查文件是否能够进行IO操作,对于socket来说,这个 poll() 接口就是 sock_poll(),所以我们来看看 sock_poll() 函数的实现:
static unsigned int sock_poll(struct file *file, poll_table * wait)
{
struct socket *sock;
sock = socki_lookup(file->f_dentry->d_inode);
return sock->ops->poll(file, sock, wait);
}
sock_poll() 函数的实现很简单,首先通过 socki_lookup() 函数来把文件句柄转换成socket结构,接着调用socket结构的 poll() 接口,而对应 TCP 类型的socket,这个接口对应的是 tcp_poll() 函数,实现如下:
unsigned int tcp_poll(struct file * file, struct socket *sock, poll_table *wait)
{
unsigned int mask;
struct sock *sk = sock->sk;
struct tcp_opt *tp = &(sk->tp_pinfo.af_tcp);
poll_wait(file, sk->sleep, wait); // 把文件添加到sk->sleep队列中进行等待
...
return mask;
}
tcp_poll() 函数通过调用 poll_wait() 函数把进程添加到socket的等待队列中。然后检测socket是否可读写,并通过mask返回可读写的状态。所以在 do_select() 函数中的 mask = file->f_op->poll(file, wait); 这行代码其实调用的是 tcp_poll() 函数。
接着分析 do_select() 函数:
if ((mask & POLLIN_SET) && ISSET(bit, __IN(fds,off))) {
SET(bit, __RES_IN(fds,off));
retval++;
wait = NULL;
}
if ((mask & POLLOUT_SET) && ISSET(bit, __OUT(fds,off))) {
SET(bit, __RES_OUT(fds,off));
retval++;
wait = NULL;
}
if ((mask & POLLEX_SET) && ISSET(bit, __EX(fds,off))) {
SET(bit, __RES_EX(fds,off));
retval++;
wait = NULL;
}
因为 mask 变量保存了socket的可读写状态,所以上面这段代码主要通过判断socket的可读写状态来把socket放置到合适的返回集合中。如果socket可读,那么就把socket放置到可读集合中,如果socket可写,那么就放置到可写集合中。
wait = NULL;
if (retval || !__timeout || signal_pending(current))
break;
if(table.error) {
retval = table.error;
break;
}
__timeout = schedule_timeout(__timeout);
}
current->state = TASK_RUNNING;
poll_freewait(&table);
*timeout = __timeout;
return retval;
}
最后这段代码的作用是,如果监听的socket集合中有可读写的socket,那么就直接返回(retval不为0时)。另外,如果调用 select() 时超时了,或者进程接收到信号,也需要返回。
否则,通过调用 schedule_timeout() 来进行一次进程调度。因为前面把进程的运行状态设置成 TASK_INTERRUPTIBLE,所以进行进程调度时就会把当前进程从运行队列中移除,进程进入休眠状态。那么什么时候进程才会变回运行状态呢?
前面我们说过,每个socket都有个等待队列,所以当socket可读写时便会把队列中的进程唤醒。这里分析一下当socket变成可读时,怎么唤醒等待队列中的进程的。
网卡接收到数据时,会进行一系列的接收数据操作,对于TCP协议来说,接收数据的调用链是: tcp_v4_rcv() -> tcp_data() -> tcp_data_queue() -> sock_def_readable(),我们来看看 sock_def_readable() 函数的实现:
void sock_def_readable(struct sock *sk, int len)
{
read_lock(&sk->callback_lock);
if (sk->sleep && waitqueue_active(sk->sleep))
wake_up_interruptible(sk->sleep);
sk_wake_async(sk,1,POLL_IN);
read_unlock(&sk->callback_lock);
}
可以看出 sock_def_readable() 函数最终会调用 wake_up_interruptible() 函数来把等待队列中的进程唤醒,这时调用 select() 的进程从休眠状态变回运行状态。
-THE END-
推荐阅读
本公众号全部原创干货已整理成一个目录,点击「干货」或者回复 1024 即可获得。

想加入嵌入式技术交流群请加一口君微信
一口君有问必答
