
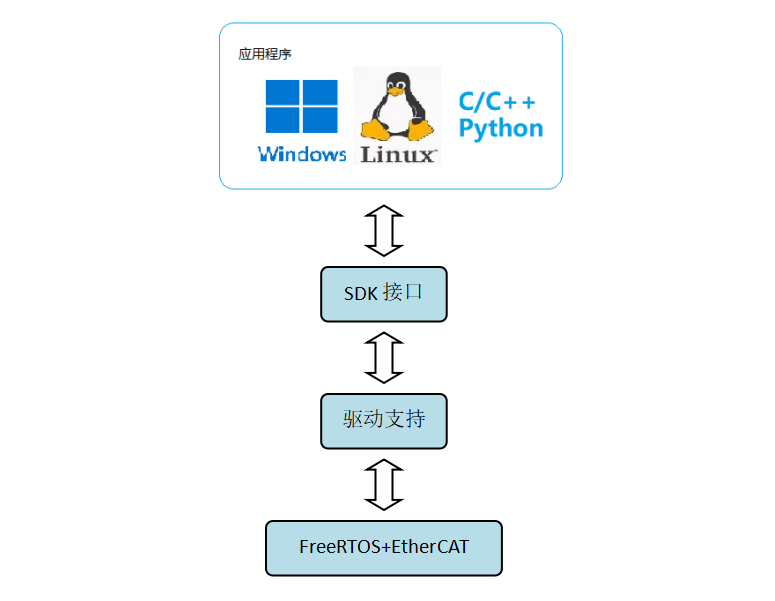
ZLG致远电子 PCIe EtherCAT通讯卡 是一款高性能的总线控制卡,专为满足高实时的工业控制需求而设计。基于PCI Express技术,该卡通过使用实时内核+商业授权EtherCAT协议栈的方式,实现了高达125us的控制周期。

 搭建步骤
搭建步骤
1.3 使用AWStudio导出EtherCAT网络信息文件(ENI)。
2.1 构建工程目录
新建Project文件夹。

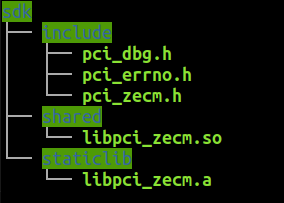
将sdk移动到工程目录中。

移动完后,工程目录Project将会是下图的样子。
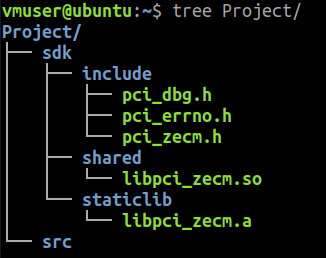
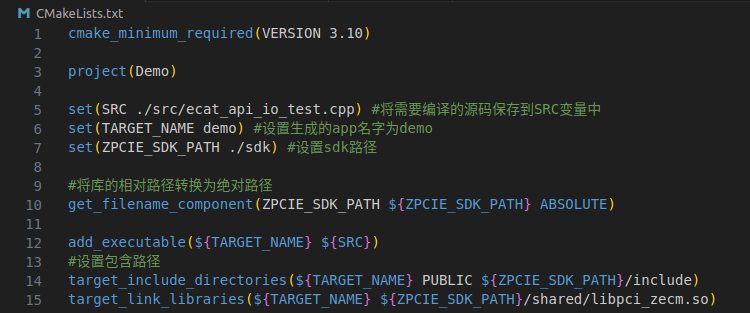
在Project目录下,创建CMakeLists.txt文件。

在src目录中创建主程序ecat_api_io_test.cpp,该文件名需要和CMakeLists.txt中的SRC变量相同。

打开ecat_api_io_test.cpp文件。输入内容:
#include#include//用于sleep #include//用于sleep #include "pci_errno.h"#include "pci_zecm.h"#include "pci_dbg.h"int32_t testDemo(int alias, int channel, const char* fileName){int result = 0;char buff[256];ECAT_HANDLE hHandle;//初始化hHandle句柄EXIT_IF_FAIL(EcatOpen(&hHandle, BOARD_ALIAS(buff, alias), channel));//启动主站EXIT_IF_FAIL(EcatBusRun(hHandle, fileName));//将状态切换为8(Operational)EXIT_IF_FAIL(EcatRequestMasterState(hHandle, EcatStateO));EXIT_IF_FAIL(EcatClose(hHandle));return result;}int main(int argc, char* argv[]){ECAT_HANDLE hHandle;char buff[256];uint32_t channel = 0, alias = 0;std::string eniFile;if (argc != 4){std::cout << "usage: " << argv[0] << " encoder_id channel eni.xml" << std::endl;return 1;}alias = atoi(argv[1]);channel = atoi(argv[2]);eniFile = argv[3];if (channel > 1){channel = 1;}testDemo(alias, channel, eniFile.c_str());return 0;}
构建项目,先去到项目的根目录。





EtherCAT 系列文章
【新品上市】ZMC900E 国产高性能EtherCAT总线控制器
【新品上市】ZLG致远电子PCIe EtherCAT通讯卡产品正式发布!
【200个电机驱动】如何实现EtherCAT分布式供电?
【200个电机驱动】如何同步运行?--基于EtherCAT的柔性电机驱动系统
【200个电机驱动】如何快速搭建柔性自动生产线?
【插针机PLC开发】用AWBlock开发运动逻辑
【插针机HMI开发】用AWTK开发人机界面
【技术分享】EtherCAT 数据帧格式和寻址方式简介
【技术分享】“脱胎换骨”--插针机运动控制
【技术分享】EtherCAT总线如何对从站固件进行升级?
【技术分享】EtherCAT冗余技术如何实现通信线缆断开的补救?
【技术分享】如何精准分析人形机器人运动数据?
【技术分享】为何EtherCAT在运动控制总线中如此受欢迎?
【产品应用】ZMC900E控制器之ROS2环境安装指南
【产品应用】EtherCAT主站控制器系统实时性测试
【产品应用】ZMC900E 国产EtherCAT主站控制器 — 电源口传导骚扰整改
【产品应用】ZMC300E EtherCAT主站控制器实现复杂的运动轨迹规划原理及应用
【产品应用】手把手带你使用ZMC300E绘图
【产品应用】三个步骤,让你的EtherCAT电机转起来
【产品应用】EtherCAT如何保障高效率、高实时性、高灵活性的现场总线通讯
【产品介绍】ZMC601E总线型边缘控制器 — 引领制造型企业数字化转型
【产品介绍】ZMC600E EtherCAT主站控制器全新上市
【产品介绍】ZLG推出新一代工业机器人解决方案,为工业机器人注入新的活力
更多往期文章,请点击“ 阅读原文 ”。