


作者 | 王车车
出品 | 汽车电子与软件
#01
引 言
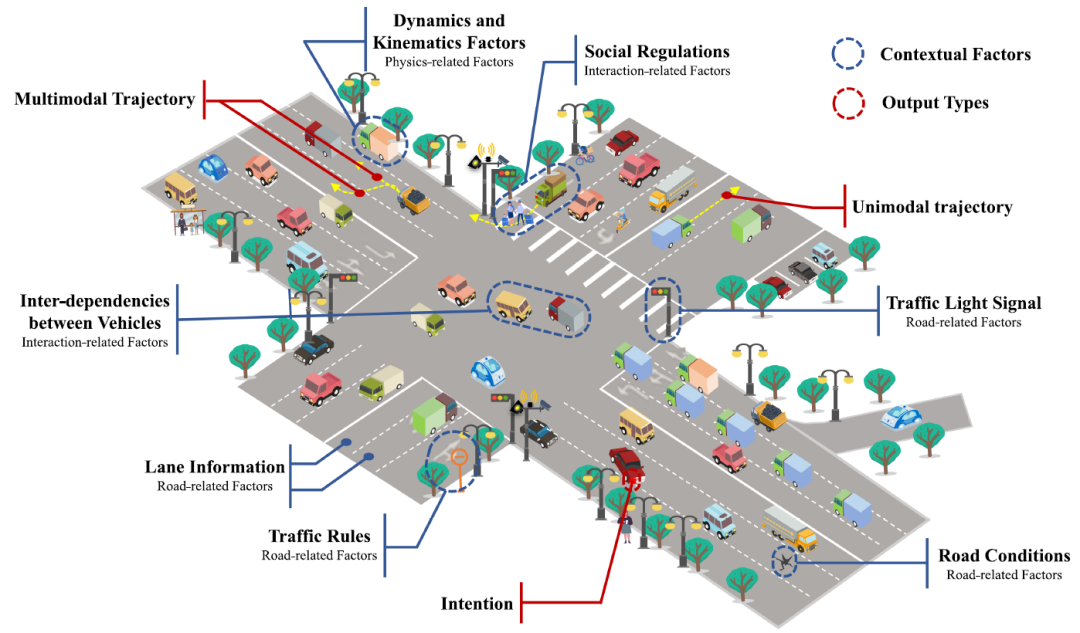
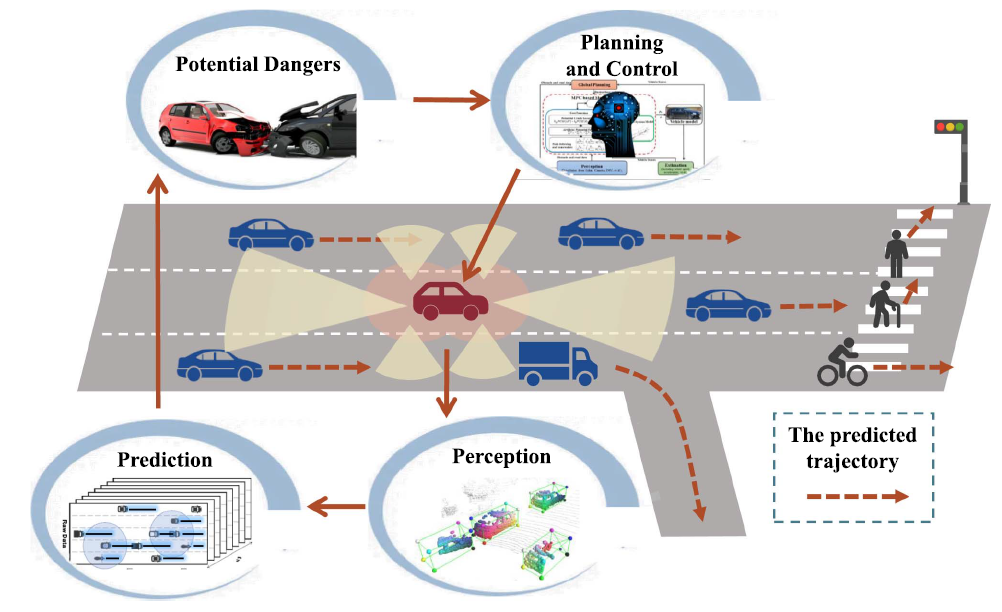
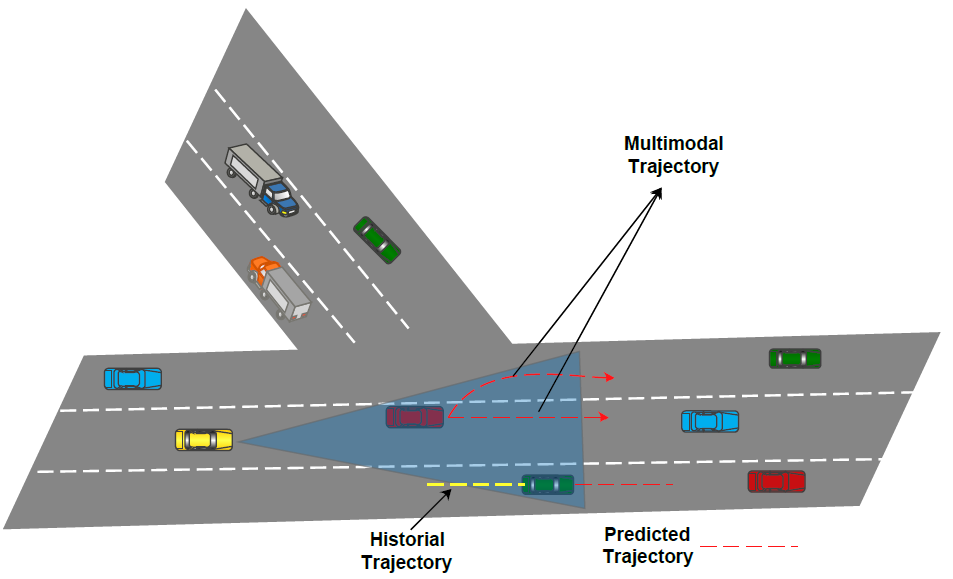
实际上轨迹预测的作用正越来越重要,成为了自动驾驶系统架构中的核心组件,位于感知与决策规划之间,扮演着桥梁角色。它基于传感器数据,如摄像头和激光雷达,综合分析周围环境动态,包括其他车辆、行人及非机动车的移动模式。这一过程不仅涉及对当前状态的捕捉,更重要的是对未来可能性的预估,即预测这些对象在未来几秒至几分钟内的可能轨迹。其重要性在于直接关联到自动驾驶汽车的安全性与行驶效率:通过精准预判,系统能提前规划避障路径,优化行车速度与路线,有效应对突发状况,减少交通事故。此外,轨迹预测的准确性还是实现流畅自动驾驶体验的关键,帮助车辆在复杂交通环境中自如穿梭,提升乘客舒适度和信任度。可以说,自动驾驶技术的智能化与拟人化水平,在很大程度上取决于轨迹预测的能力。
#02
轨迹预测技术在自动驾驶领域扮演着至关重要的角色,其方法分类主要围绕物理模型、经典机器学习、深度学习以及强化学习四大类别展开。
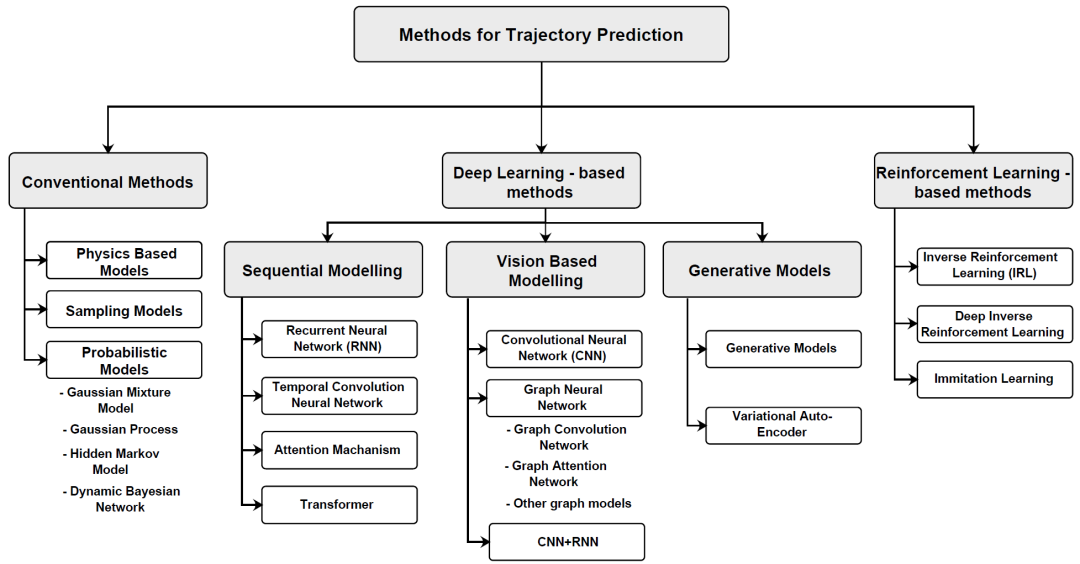
基于物理的方法利用车辆动力学和运动学理论,如恒定速度(CV)模型、恒定加速度(CA)模型,以及更复杂的恒定转弯速率和速度(CTRV)模型等。这些方法通常依赖于完善的数学和统计技术来根据历史数据和预定义模型进行预测,通过考虑车辆的动力学参数直接从当前状态推算未来轨迹。这些模型简洁高效,计算效率高,但在处理现实交通的复杂交互和不确定性时显得力不从心,通常适用于预测时间短于一秒的场景。
基于经典机器学习方法,诸如支持向量机(SVM)、高斯过程(GP)和隐马尔可夫模型(HMM),通过学习历史轨迹模式来预测未来行为。这些模型能够融入更多情境因素,可以处理更多种类的场景特征,但泛化能力受限,尤其在处理未见过的驾驶策略时,例如,动态贝叶斯网络(DBN)虽能对交互有一定建模,但策略判断能力有限。
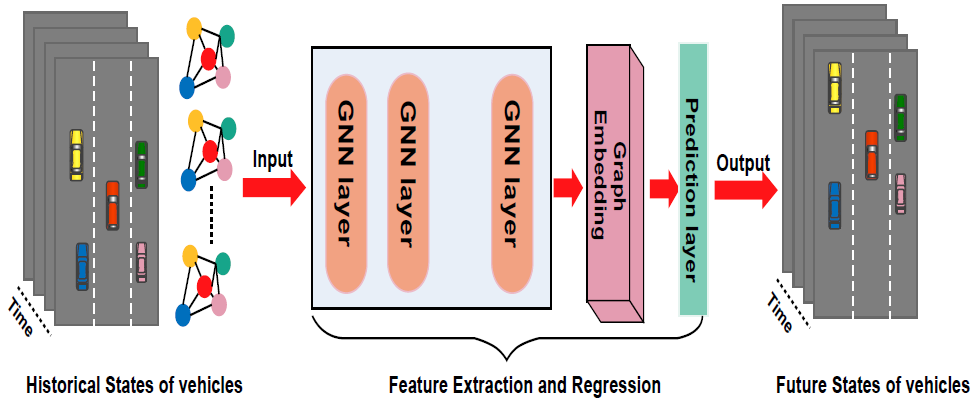
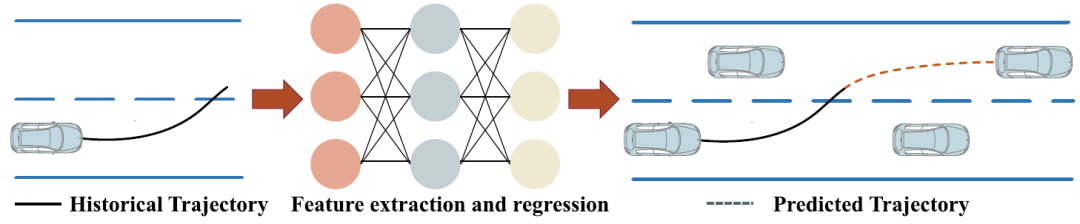
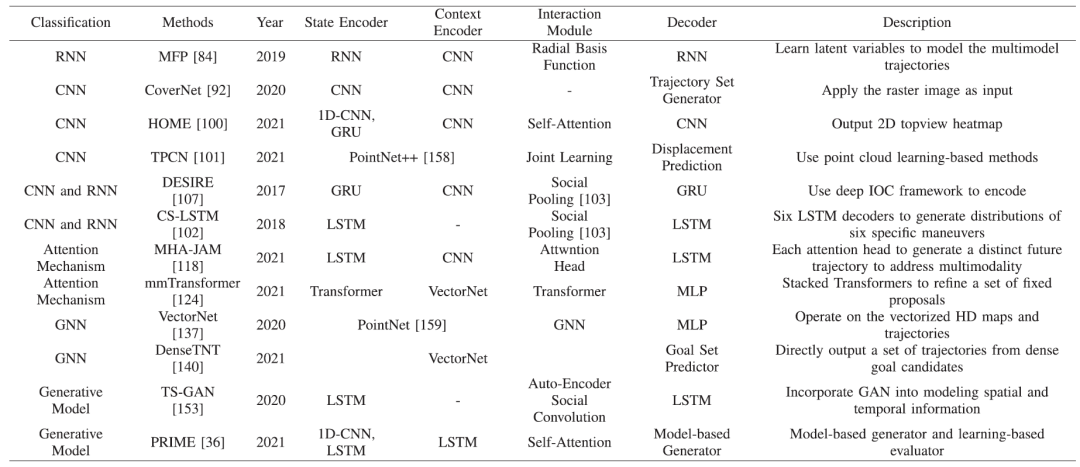
基于深度学习的方法,基于深度学习的方法在自动驾驶车辆(AVs)的轨迹预测方面受到了广泛关注。这些方法利用人工神经网络从大量数据中学习复杂的模式和关系,如使用循环神经网络(RNN)、卷积神经网络(CNN)和生成式对抗网络(GAN),通过多层次特征提取,能捕捉更复杂的时间序列依赖和交互关系,生成多模态轨迹,显著提升了预测的复杂度和精度。RNN和其变种LSTM、GRU能有效处理序列数据,捕捉时间依赖;CNN擅长提取空间特征,两者结合则可同时考虑时间序列和空间交互。注意力机制聚焦关键信息,提高预测的针对性。生成式对抗网络(GAN)和变分自编码器(VAE)等生成模型则为多模态预测提供了可能。与传统方法相比,基于深度学习的方法在捕获复杂模式、处理不同场景和生成更准确的轨迹预测方面表现出更好的性能。缺点是它们需要大量标记的训练数据和计算资源来进行训练和推理。此外,学习模型的可解释性是一个挑战,因此验证预测并了解模型在现实场景中的局限性非常重要。
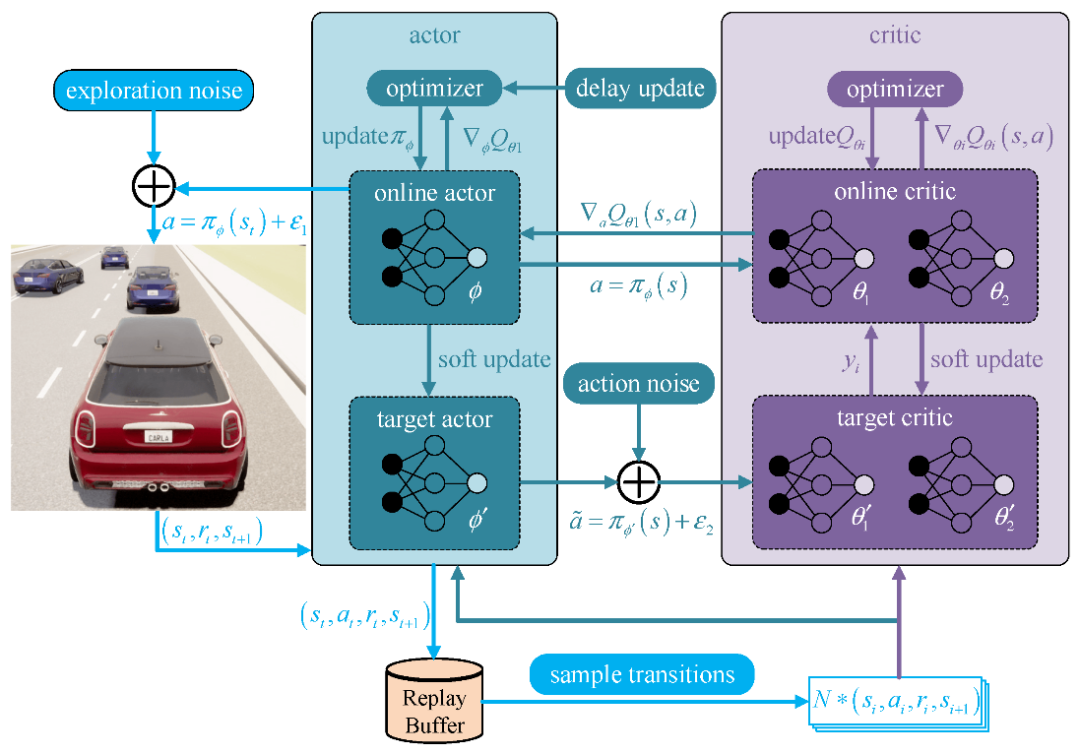
基于强化学习的方法,特别是逆强化学习(IRL)和深度逆强化学习(DIRL),通过模拟专家轨迹学习奖励机制,进而预测未来轨迹。IRL通过奖励函数学习策略,区分不同行为的价值,而DIRL则采用深度网络逼近复杂奖励函数。结合深度学习网络,这些方法可以更好地提取专家演示并考虑更多因素,其缺点在于,大多数都是计算密集型的,需要长时间的训练。而且要考虑 RL 算法的复杂性和训练数据的可用性之间的权衡,以及泛化到各种驾驶场景和现实环境中的不确定性的问题。
总之,每类方法各有优劣,实际应用中往往结合使用,以提高预测的准确性和实时性,满足自动驾驶轨迹预测与安全规划的需求。
#03
数据集
各种数据集的出现促进了基于学习的预测算法的性能,为了评估轨迹预测模型的质量,通常将预测轨迹与从各种数据集获得的真实轨迹进行比较。这些数据集由激光雷达和摄像头等传感器收集,并手动注释或自动生成车辆轨迹序列。
大多数方法都以轨迹作为输入,有些方法还使用车辆状态或地图信息。由于这些数据集中的大多数轨迹是通过从图像或点云学习方法获得的,因此一些模型也直接使用图像或点云来作为端到端轨迹预测输入。
评估指标
(1)Root Mean Squared Error(RMSE):计算平方预测误差平均值的平方根,RMSE对大的轨迹预测误差敏感,是轨迹预测的常用度量之一。
(2)Negative Log Likelihood(NLL):对于建模的轨迹分布,RMSE用于计算模型的平均误差,而NLL更侧重于确定基于机动的模型中轨迹的正确性。
(3)Average displacement error(ADE):预测轨迹和真实轨迹之间的平均距离。对于多模态预测,最小ADE(mADE)通常用于指示ADE超过K个预测的最小值。
(4)Final displacement error(FDE):最终预测结果与相应真实轨迹位置之间的距离。对于多模态预测,最小FDE(mFDE)通常用于指示FDE超过K个预测的最小值。
(5)Miss Rate(MR):基于最终位置的距离,预测轨迹不在真实轨迹2.0米范围内的情况比率。当预测结果为多模态时,假设预测结果为K个可能的未来轨迹,则将根据最佳未来轨迹判断ADE、FDE和MR。
(6)计算时间:计算时间对于该方法的车载性能非常重要。自动驾驶汽车的计算能力有限,但轨迹预测模型通常很复杂,需要巨大的计算资源。为了实现更高的自动驾驶水平,每个模块的计算必须相对较快,以尽可能减少延迟。因此,实时性能或计算成本对模型非常重要。
(7)预测范围:指模型可以预测的未来时间步长。通常,预测范围越长,在动态甚至随机驾驶环境中的准确度就越低。但是,为了满足规划和控制系统的要求,应将具有一定周期时间的轨迹预测结果输入系统,以便预测时间不应太短,并与其他模块保持一致。
#04
在自动驾驶技术的持续演进中,轨迹预测作为确保道路安全的关键一环,面临诸多维度的挑战,具体包括但不限于以下几个方面:
实时性:当前的复杂交互性要求模型不仅需要考虑个体车辆动力学和运动学特性,还需整合环境动态,如道路布局、交通规则、交通标志乃至其他多个车辆的行车意图。这导致模型设计需高度复杂,且难以平衡精度与计算效率。
不确定性:交通参与者的未来轨迹受到众多不可预知因素影响,如驾驶者意图、环境变化,使得预测难以达到绝对准确,这要求模型需能处理预测中的不确定性。

传感器限制:自动驾驶车辆依赖于多种传感器如摄像头、激光雷达、毫米波雷达等,覆盖范围有限,易受遮挡、天气影响,导致跟踪不准确。
数据短缺:实际应用中,数据不足或缺失,传感器故障,历史数据损坏,会影响预测的准确性。
难以长期预测:长期预测(至少3秒以上)中,初期小误差累积可能导致与真实轨迹偏离大,预测准确性降低。
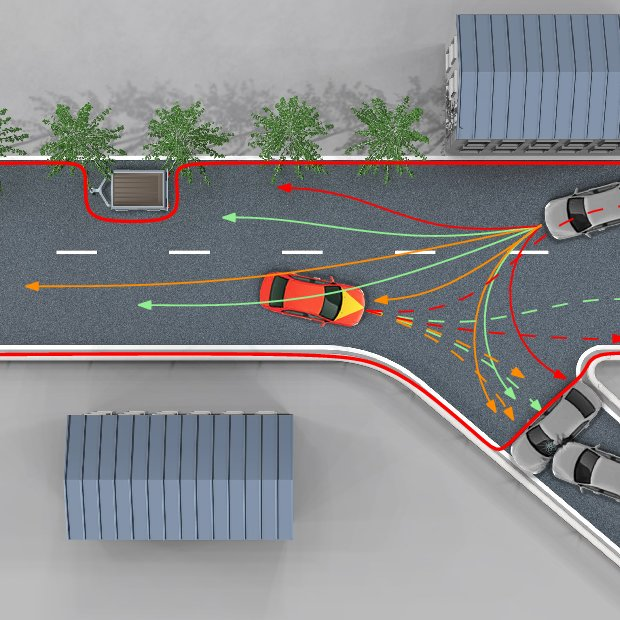
复杂环境适应性:在路口、环岛、繁忙市区等复杂动态环境中,模型需处理多主体间复杂互动,模型设计难度增加。
泛化与模型局限性:模型必须在未见过的驾驶场景和车辆交互中保持准确预测,基于物理模型虽然在简单场景和短期预测中表现良好,但缺乏描述复杂交互和策略多样性,难以应对动态变化,限制了其长期和复杂环境的预测。
鲁棒性:数据噪声与不确定性亦是一大难题,现实感知数据中固有的跟踪错误、定位偏差等,要求算法具备鲁棒性,能有效处理不完美信息,确保预测的可靠性。
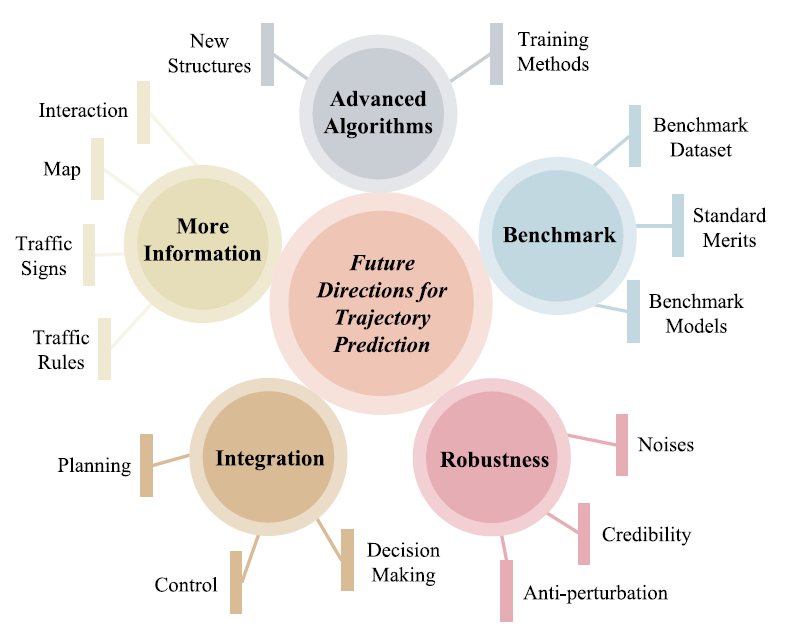
未来研究方向上,首要在于增强模型的交互感知与环境适应性。结合图神经网络(GNN)、注意力机制等深度学习技术,更深层次地捕捉复杂交互特征,同时考虑道路信息、交通规则,实现更真实的预测。高精地图与矢量地图融合将是提升预测精度的关键,利用地图信息更精确反映道路结构,指导预测,减少错误率,特别是长时域预测。
其次,多模型融合与混合方法是趋势,结合物理模型的即时性与学习模型的泛化能力,如基于强化学习的策略优化,实现更智能预测。在线学习与适应性,使模型能在运行中学习新数据,适应变化,提升泛化与预测的长期准确性。同时,计算效率优化,轻量化、模型压缩与硬件加速策略,确保算法在车载实时性。
最后,标准评估体系与数据集的建立至关重要。构建多样、真实、涵盖复杂情况的基准数据集,标准化评价指标,包括多模态预测的准确度量,利于公平比较与进步验证模型,推动技术发展。不确定度量纳入考量,如概率评估,反映模型对预测的可信度,是未来研究的重点。
参考文献
[1] Bharilya V, Kumar N. Machine learning for autonomous vehicle's trajectory prediction: A comprehensive survey, challenges, and future research directions[J]. Vehicular Communications, 2024: 100733.
[2] Huang Y, Du J, Yang Z, et al. A survey on trajectory-prediction methods for autonomous driving[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7(3): 652-674.
[3] Liu J, Mao X, Fang Y, et al. A survey on deep-learning approaches for vehicle trajectory prediction in autonomous driving[C]//2021 IEEE International Conference on Robotics and Biomimetics (ROBIO). IEEE, 2021: 978-985.
[4] Singh A. Trajectory-Prediction with Vision: A Survey[C]//Proceedings of the IEEE/CVF International Conference on Computer Vision. 2023: 3318-3323.
[5] Leon F, Gavrilescu M. A review of tracking, prediction and decision making methods for autonomous driving[J]. arxiv preprint arxiv:1909.07707, 2019.
/ END /
