4 月 24 日,地平线重磅发布新一代车载智能计算方案征程®6系列以及 Horizon SuperDrive™ 全场景智能驾驶解决方案。
征程 6 系列共推出六个版本,包括征程 6B、征程 6L、征程 6E、征程 6M、征程 6H、征程 6P,面向不同智能驾驶场景进行了计算方案的灵活配置,均能提供兼顾性能与成本的最优解。
同时官宣征程 6 系列的 10 家首批量产合作车企及品牌,包括上汽集团、大众汽车集团、比亚迪、理想汽车、广汽集团、深蓝汽车、北汽集团、奇瑞汽车、星途汽车、岚图汽车。
这是一个足以让同行羡慕的朋友圈。
除了主机厂还有多家 Tier1、软件公司也在基于征程 6 在开发城区辅助驾驶。征程 6 系列将于 2024 年内开启首个前装量产车型交付,并预计于 2025 年实现超 10 款车型量产交付。
这一切如此自然而顺利,没有 AB 定点赛马的鱿鱼游戏,也没有强行要求降价否则更换供应商的咬牙坚持,也没有几乎不收费只求一个定点函的绝处求生。
似乎自动驾驶前装量产那些卷无可卷的故事在地平线这里全部消失了。
在这个自动驾驶寒冬,明媚的春天却为地平线到来。
地平线做对了什么?
对用户需求的深入洞察才能抵达智能驾驶终局
看完这次发布会,我似乎有了一个答案:从用户的需求出发。
这里的用户,指的不是与地平线合作的车企或者 Tier1,而是真正的,将要使用在地平线征程6系列上开发的智能驾驶功能的消费者。
这不是一个很直观的结论,因为作计算方案提供商,地平线并不交付最后的智能驾驶产品,实际上也不需要对智能驾驶的产品体验负责。
但是地平线并没有这么做,这也就成为了地平线的立身之本。
2023 年城区智驾的开城之战似乎还没分出胜负,一夜之间宣传口径就变成了「全国都能开」,仿佛我们离 L4 自动驾驶几乎一步之遥。
但是实际上,大部分城区智能驾驶的体验只能用糟糕来形容,离真正的安心而可信赖有着不小的距离。
地平线作为 Tier2,虽然不直接接触用户,但是同时也很幸运地远离宣传战争,也有了更多空间去思考用户真正想要的是什么。
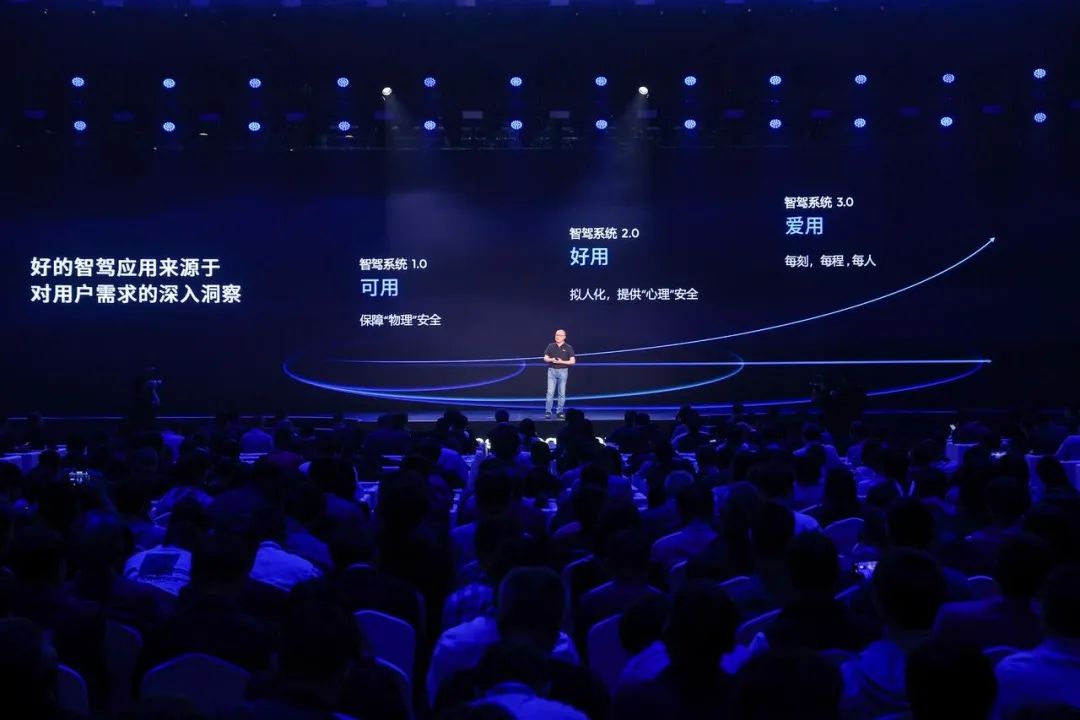
「可用」指物理安全,不发生严重的事故,实际上目前的城区 NOA 尚且处于这一阶段; 「好用」能够用拟人化的体验提供心理上的安全感,这一步就有了非常大的提升; 「爱用」就真正提供了技术普惠,让普罗大众都能用上。
这是余凯博士在发布会现场专门用了一页 PPT 所展示的理念,这一整页其实一直在试图阐述两个信息:一,商业和功能如何自洽,同时又带给用户价值;二,如果让技术更好服务用户,这是工程的底层思考。
所以这也是地平线从硬件到软件全部自研的原因。
从可用到好用,最后到爱用,其实这每一步都需要小心翼翼,任何试图超出实际产品边界的宣传都会透支用户的信任,也会在之后付出代价。
对此元戎启行的 CEO 曾经表示:「我认为这个市场上对智驾的透支太多了,大家天天讲智驾,就跟已经是无人驾驶了一样的,但实际上透支太多了」。
例如 Tesla FSD V12.3 虽然表现相比于以往有了巨大的进步,但是由于 FSD V12 以前的宣传名不副实,导致 FSD V12 的推广变得异常艰难。
这是地平线通过对用户的洞察,希望实现的发展路径。
那么为了实现这些,地平线要怎么做?
地平线的回答是:
如果说最终的目的是为了提供好用并且拟人化的智能驾驶体验,似乎逃不开的一个词是:端到端。
感知决策一体化,能够让决策更好地使用周围环境的信息,在端到端的训练过程中,能够学习到更加类人的轨迹。
它的潜力是拥有更高的性能上限。由于任务更少、避免了大量重复处理,也避免了信息流失。特斯拉 V12 已经做了很好的示范。
但是,在端到端的赛道上地平线已经悄然领先。
早在 2023 年 CVPR,端到端自动驾驶论文 UniAD 横空出世,一举获得当年计算机视觉顶级论文会议最佳论文奖项,人们在称赞这篇论文里程碑意义的时候,却没有看到学者其实来自地平线,大部分研究其实也是在地平线合作完成的。
地平线的公开定位是智驾计算方案公司,然而其创始团队却是算法软件出身,例如余凯博士、黄畅博士均为深度学习领域的顶级大牛,也因此地平线能在软硬结合这条更系统、更综合的智驾实现路径上走的更远,同时其软件方案能力又保持着行业领先的水准。
这就带来了一个好处,地平线非常清楚要做出一个让客户好用的计算方案,和让用户体验好的辅助驾驶各自需要什么。
所以当我们看到 Horizon SuperDrive 全场景智驾解决方案出场的时候,你才能理解上面那句话的含义。
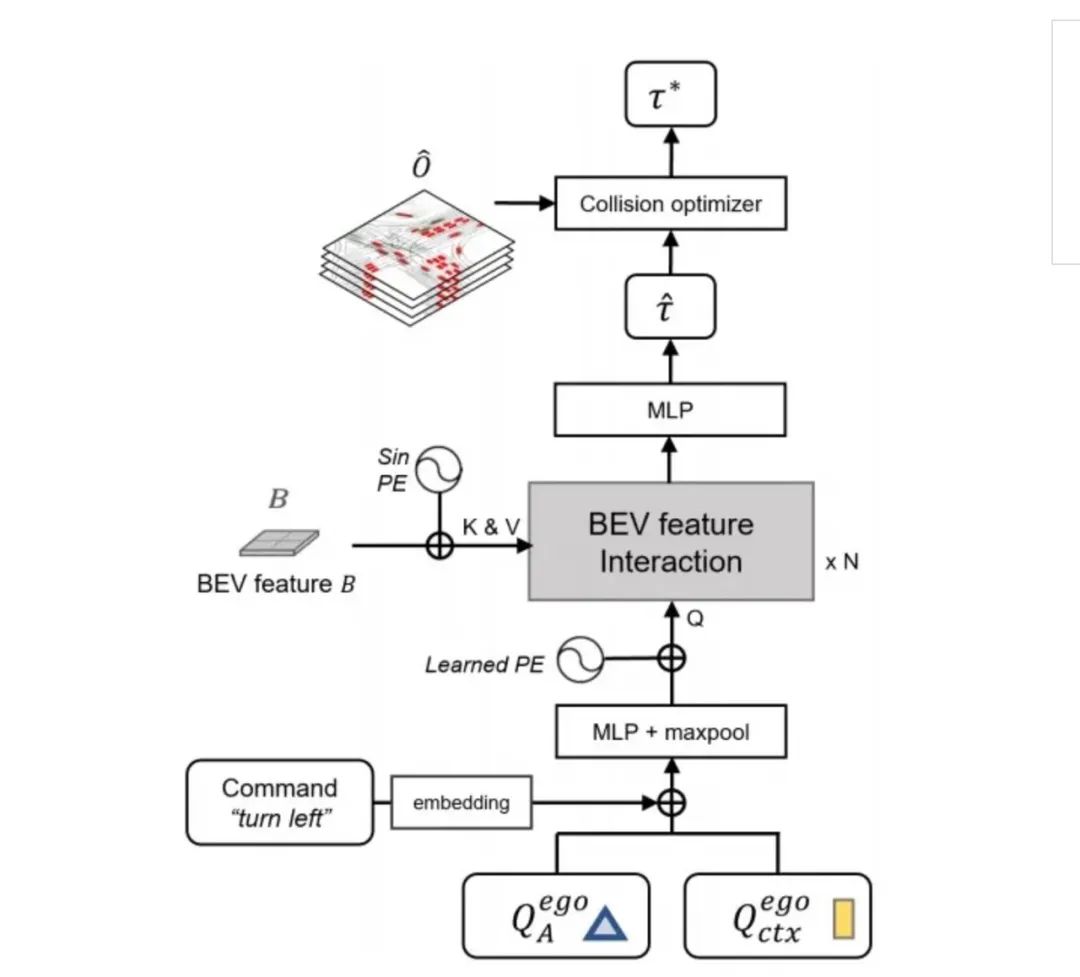
说到地平线 SuperDrive 我们依然要从技术说起,我们可以先看一下端到端自动驾驶论文 UniAD 的算法框架:

很直观就可以发现,其实各个模块之间还是保持了相对独立,也可以统一训练也可以单独优化,这是一个兼具「实用性」和「先进性」的架构。
当然 UniAD 作为学术研究内容,目前并没有实际部署,但是在研究中获得的经验让地平线的自动驾驶量产团队更加前沿的视角。
不管是 BEV、Transformer、Occupancy,还是端到端,它们其实都是在解决一个目标问题:如何让自动驾驶更加安全和有效为用户提供出行服务。
这是一个终极目标,但科学界、工程界从来就不喜欢一蹴而就,在真实的物理世界里,工程师的解法是讲场景拆分,逐步去解决。
2024 年这个时间档口,城区辅助驾驶基本是主流主机厂的必争之地,但这里要说一个背景,事实上如果完成城区辅助驾驶的量产,那对于高速也是包含关系。
这也是为什么 SuperDrive 叫全场景智驾解决方案。
虽然叫全场景智驾解决方案,但今天我们主要讨论的是城区,因为城区一方面可以展示地平线对于辅助驾驶系统策略的理解,另一方面可以映射出地平线真正的技术实力。
辅助驾驶的策略往往和用户体验直接关联,他要求开发者对于辅助驾驶系统如何在现实场景里跑要有更好的理解。
简单理解就是,城区虽然也是结构化道路,但却包含了「低、中、速」、复杂路况、复杂交通参与者、复杂道路指引等这些难以理解,却要准确决策的信息。
甚至在城市地面道路,如何调车辆变道速度都是一个极大的工程。
SuperDrive 可以重点「照顾」了几个场景:
这些都是常见的城市高阶辅助驾驶的任务。
并且从演示视频来看,这套方案对周围物体的位置和速度的检测已经到了非常高的精度,例如 demo 中的极限向右变道。
可以看到后方车辆的位置激光雷达无法覆盖,大部分方案其实这个位置的检测非常不准确,因为物体的速度信息、3D 信息、高度信息可能会丢失,所以变道会相对谨慎,尤其是在城区拥堵时,会带来体验降级。而对于地平线 的SuperDrive系统,目前看已经可以稳定执行这种相对极限的变道。
而路口无保护左转也能看到 SuperDrive 在加入了动态博弈部分之后,获得了更加拟人的轨迹,并且在左转时稍微侵入直行车的位置,直行车流结束之后迅速起步,干净利落,毫不拖泥带水。
这种博弈博弈场景并不简单,除了对空间感知能力要求高,对于空间内物体和自车行驶轨迹的预测要求也更高,更难得是,博弈过程中的规控并不好做,博弈场景里是对外车和自车空间距离、位置的不断压缩和挪移,对车控精度和响应速度要求高。
这就需要地平线具备一个统一的网络架构去做感知和规控。
在感知部分,他们提出了动态、静态、Occupancy 三网合一的感知端到端网络,更加精准还原 3D 物理世界。
在此架构下遮挡准召率提升 70%,动态代码行数降低 90%,网络负载降低 50%,有效解决当前行业感知架构时延高、规则多、负载重的问题。
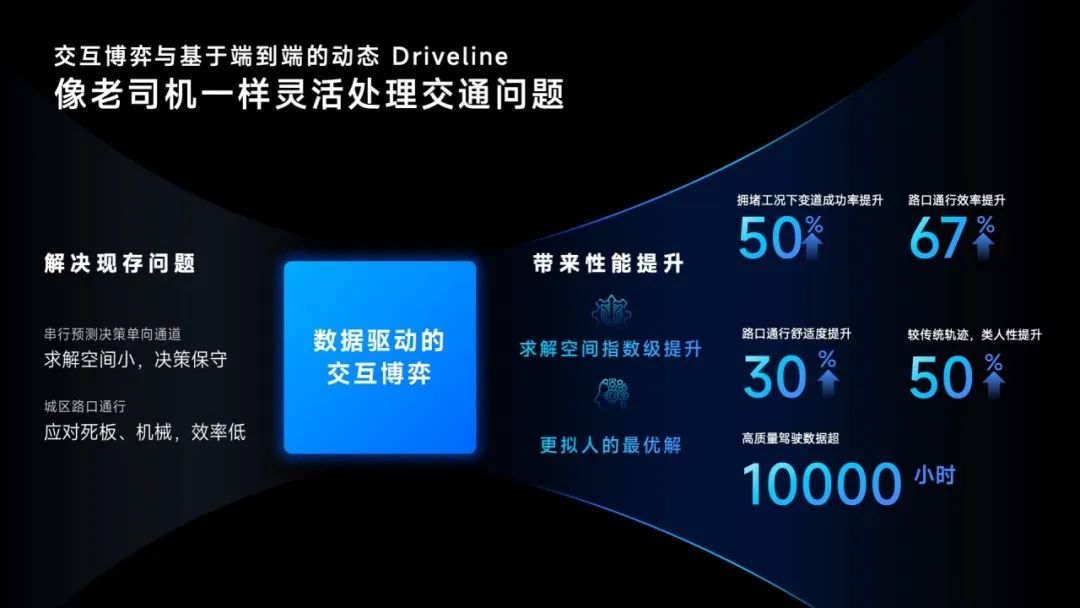
同时地平线也设计研究了交互博弈与基于端到端的动态 Driveline,不再是基于规则的决策网络,有了一个更加灵活的大脑。

这一套方案,让地平线的自动驾驶解决方案 SuperDrive 能像老司机一样灵活处理交通流,真正与上一代的智能驾驶方案做出了区别。
而在软件进阶的要求下,硬件也需要重新思考设计。
从 2019 年到 2021 年,地平线 BPU 架构历经从伯努利 1.0 到伯努利 2.0再到贝叶斯的三代进化,积累了超过 500 万套的前装量产验证。
而这每一代的进化,都来自于软件的进阶,从最早的卷积为主,到 Transformer 大行其道,再到目前对大参数 Transformer 和交互博弈的要求。
这次地平线推出 BPU Nash。
这是一个很有意思的名字,来自著名数学家约翰纳什,博弈论的创始人,提出纳什均衡的概念和均衡存在定理。
可见地平线将这一代方案的定位。
而纳什均衡的简单定义是:任何一位玩家在此策略组合下单方面改变自己的策略(其他玩家策略不变)都不会提高自身的收益。
如果自动驾驶决策能够达到这样的目标,那么一定是安心可信赖的。

那么地平线是怎么支持的呢?
其实对于每一种神经网络结构,都会有很多特定高频的算子调用,实际上,算法的性能常常被这些高频调用限制。
所以对于 Transformer 架构中被高频使用的 Layer Normalization,SoftMax 算子,在硬件上做了定向加速。
并且为了实现更好的数据交换性能,在硬件上就设计了 L0M,L1M,L2M 三层提升缓冲和数据交换性能。
简单理解似乎是为数据提供了更多层的实时处理空间,将缓冲数据在三层空间内逐级保存,而不是每次清理缓存。
同时为了更好支持博弈算法,地平线也设计了标量计算核(RICSV),提升高频次的小模型的调度计算效率。
这是在软件设计上发现的性能瓶颈,定向在硬件上解决带来的红利。
写在最后
从用户需求出发,去思考软件的设计理念,并且实践,在软件的设计实践的过程中,获得对硬件的要求,然后再去设计硬件。
这条路径让地平线的软件和硬件都始终保持在行业前沿。
而同时为了让这条链路更加高效的运转,也能更好满足用户的需求,地平线整个链路中的任何一环都开放合作。
毕竟最后的目的都是为了终端用户的需求,没有什么不能开放的。
更多阅读