

1.概述
2. 原理
3. 使用场景
4. 实践
4.1 Github搜索
4.2 编写makefile
4.3 编译运行
5.总结
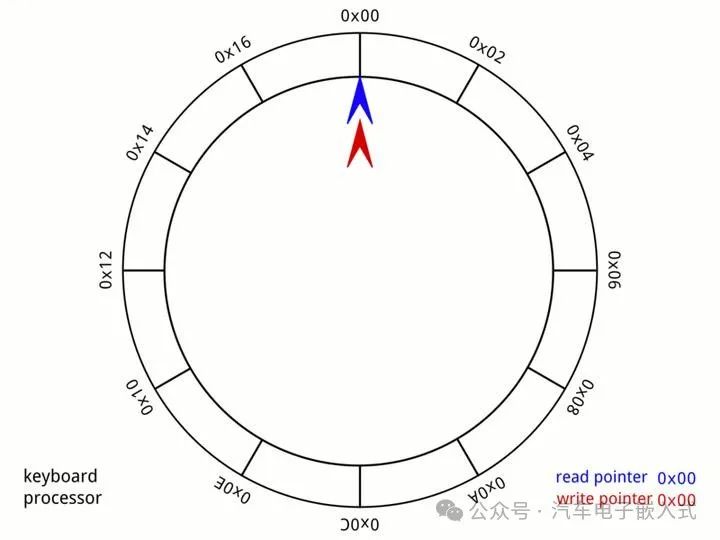
ring buffer称作环形缓冲区,也称作环形队列(circular queue),是一种用于表示一个固定尺寸、头尾相连的缓冲区的数据结构,适合缓存数据流。如下为环形缓冲区(ring buffer) 的概念示意图。
在任务间的通信、串口数据收发、log缓存、网卡处理网络数据包、音频/视频流处理中均有环形缓冲区(ring buffer) 的应用。在RT-Thread的ringbuffer.c和ringbuffer.h文件中,Linux内核文件kfifo.h和kfifo.c中也有环形缓冲区(ring buffer)的代码实现。
环形缓冲区的一些使用特点如下:
当一个数据元素被读取出后,其余数据元素不需要移动其存储位置;
适合于事先明确了缓冲区的最大容量的情形。缓冲区的容量(长度)一般固定,可以用一个静态数组来充当缓冲区,无需重复申请内存;
如果缓冲区的大小需要经常调整,就不适合用环形缓冲区,因为在扩展缓冲区大小时,需要搬移其中的数据,这种场合使用链表更加合适;
因为缓冲区成头尾相连的环形,写操作可能会覆盖未及时读取的数据,有的场景允许这种情况发生,有的场景又严格限制这种情况发生。选择何种策略和具体应用场景相关。
2. 原理
站在巨人的肩膀上,有文章已经介绍的很好了,参考文章:
https://zhuanlan.zhihu.com/p/534098236
3. 使用场景
只要出现数据生产者和的可能速度快于数据消费者场景,就需要使用缓存buffer. 比如在汽车ECU控制器中(如座舱域控制器)MCU和SOC之间的通信(如MCU收到CAN数据,根据情况上传给SOC)肯定需要使用缓存buffer, 这个buffer还需要具有先进行出的特性,那么就需要ring buffer.
4. 实践
如果是学习的话,我们当然可以从0到1自己写一个,这样更加能锻炼我们的代码能力。如果是项目着急使用的话,我们首先考虑站在巨人的肩膀上看有没有开源现成的可以参考。
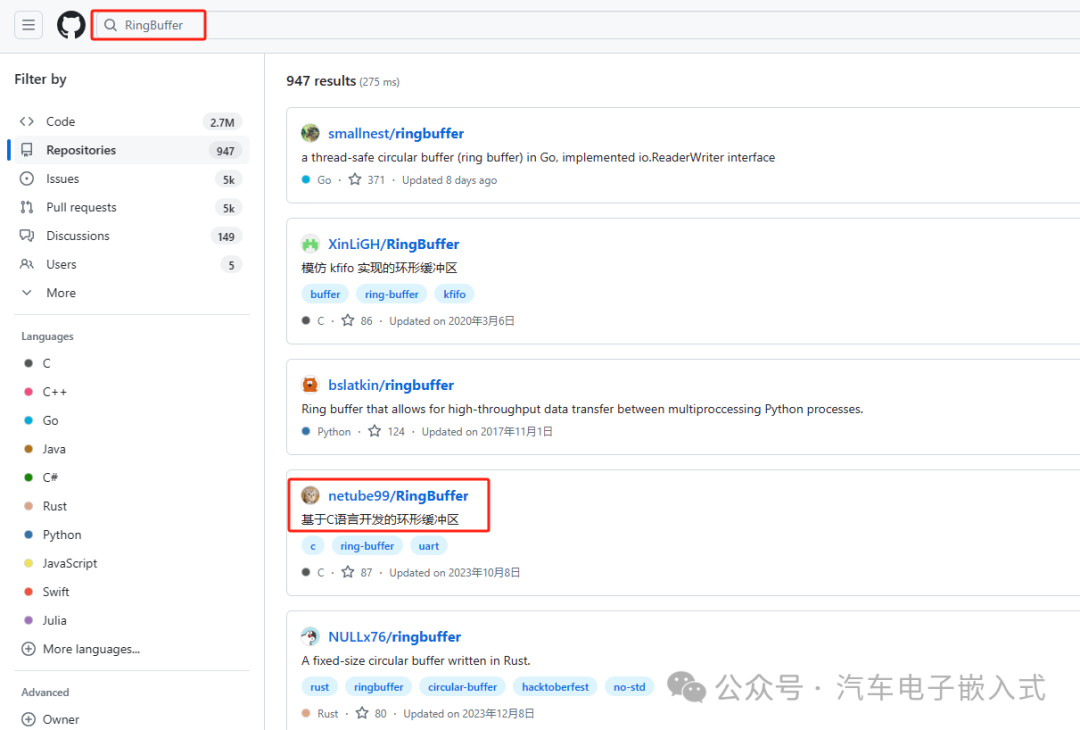
4.1 Github搜索
github上搜索ringbuffer, 找一个star数相对比较高的项目。
读下项目的README
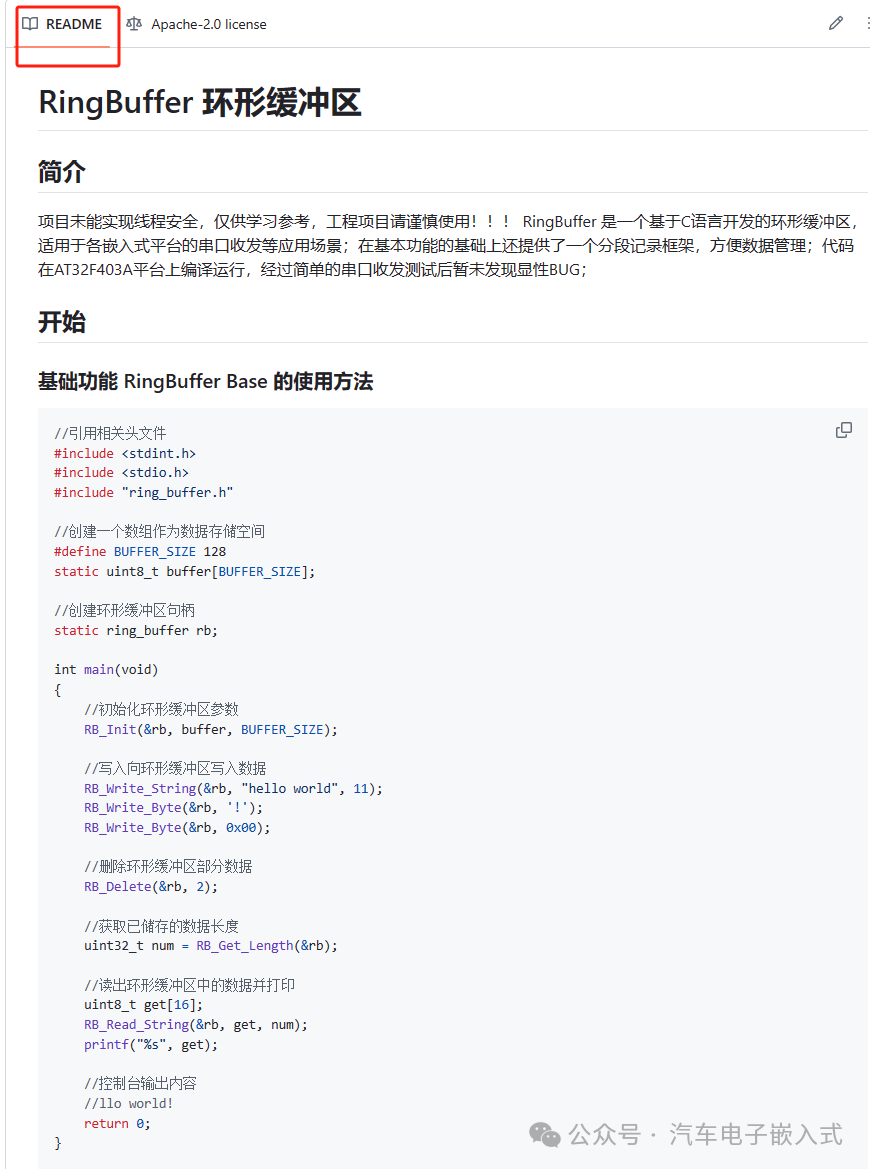
项目在实际硬件平台上使用过,且有相关的测试代码,但是没有makefile,我们需要编写一个makefile来测试下。
Github链接:https://github.com/netube99/RingBuffer
4.2 编写makefile
makefile参考本公众号的系类文章:
编译链接专题第7篇-变量的高级主题(下)
#makefileCOMPILER := gccTARGET := ringbuffer.exeOBJS := ring_buffer.o ring_buffer_chapter.o main.oRM := del$(TARGET) : $(OBJS)$(COMPILER) -o $@ $^$(OBJS) : %.o : %.c$(COMPILER) -o $@ -c $^.PHONY : rebuild clean allrebuild : clean allall : $(TARGET)clean :$(RM) *o $(TARGET)
测试代码:
//引用相关头文件//创建一个数组作为数据存储空间static uint8_t buffer[BUFFER_SIZE];//创建环形缓冲区句柄static ring_buffer rb;int main(void){//初始化环形缓冲区参数RB_Init(&rb, buffer, BUFFER_SIZE);//写入向环形缓冲区写入数据RB_Write_String(&rb, "hello world", 11);RB_Write_Byte(&rb, '!');RB_Write_Byte(&rb, 0x00);//删除环形缓冲区部分数据RB_Delete(&rb, 2);//获取已储存的数据长度uint32_t num = RB_Get_Length(&rb);//读出环形缓冲区中的数据并打印uint8_t get[16];RB_Read_String(&rb, get, num);printf("%s", get);//控制台输出内容//llo world!return 0;}
4.3 编译运行
编译这个开源项目,生成可执行文件ringbuffer.exe
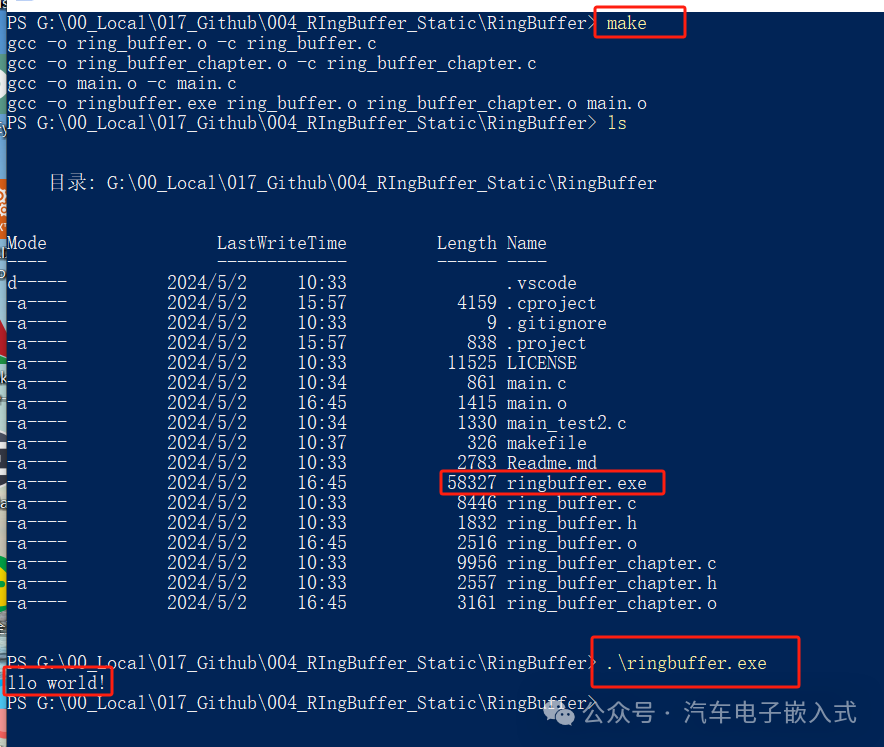
执行ringbuffer.exe,结果符合测试代码的预期。
5.总结
本文没有详细赘述ringbuffer的原理(参考文章中有详细介绍),着重介绍了项目中需要使用ringbuffer的场景,同时介绍了实际工程中如何从github中获取开源项目并编译运行起来。
ringbuffer的源码如下:
ring_buffer.h
/*** \file ring_buffer.h* \brief 简易环形缓冲相关定义与声明* \author netube_99\netube@163.com* \date 2022.08.20* \version v0.4.0*///返回值定义//环形缓冲区结构体typedef struct{uint32_t head ; //操作头指针uint32_t tail ; //操作尾指针uint32_t Length ; //已储存的数据量uint8_t *array_addr ; //缓冲区储存数组基地址uint32_t max_Length ; //缓冲区最大可储存数据量}ring_buffer;uint8_t RB_Init(ring_buffer *rb_handle, uint8_t *buffer_addr ,uint32_t buffer_size); //初始化基础环形缓冲区uint8_t RB_Delete(ring_buffer *rb_handle, uint32_t Length); //从头指针开始删除指定长度的数据uint8_t RB_Write_Byte(ring_buffer *rb_handle, uint8_t data); //向缓冲区尾指针写一个字节uint8_t RB_Write_String(ring_buffer *rb_handle, uint8_t *input_addr, uint32_t write_Length); //向缓冲区尾指针写指定长度数据uint8_t RB_Read_Byte(ring_buffer *rb_handle, uint8_t *output_addr); //从缓冲区头指针读一个字节uint8_t RB_Read_String(ring_buffer *rb_handle, uint8_t *output_addr, uint32_t read_Length); //从缓冲区头指针读指定长度数据uint32_t RB_Get_Length(ring_buffer *rb_handle); //获取缓冲区里已储存的数据长度uint32_t RB_Get_FreeSize(ring_buffer *rb_handle); //获取缓冲区可用储存空间
ring_buffer.c
/*** \file ring_buffer.c* \brief 简易环形缓冲的实现* \author netube_99\netube@163.com* \date 2022.08.20* \version v0.4.0*/#include#include#include "ring_buffer.h"/*** \brief 初始化新缓冲区* \param[out] rb_handle: 待初始化的缓冲区结构体句柄* \param[in] buffer_addr: 外部定义的缓冲区数组,类型必须为 uint8_t* \param[in] buffer_size: 外部定义的缓冲区数组空间* \return 返回缓冲区初始化的结果* \arg RING_BUFFER_SUCCESS: 初始化成功* \arg RING_BUFFER_ERROR: 初始化失败*/uint8_t RB_Init(ring_buffer *rb_handle, uint8_t *buffer_addr ,uint32_t buffer_size){//缓冲区数组空间必须大于2且小于数据类型最大值if(buffer_size < 2 || buffer_size == 0xFFFFFFFF)return RING_BUFFER_ERROR ; //初始化失败rb_handle->head = 0 ; //复位头指针rb_handle->tail = 0 ; //复位尾指针rb_handle->Length = 0 ; //复位已存储数据长度rb_handle->array_addr = buffer_addr ; //缓冲区储存数组基地址rb_handle->max_Length = buffer_size ; //缓冲区最大可储存数据量return RING_BUFFER_SUCCESS ; //缓冲区初始化成功}/*** \brief 从头指针开始删除指定长度的数据* \param[out] rb_handle: 缓冲区结构体句柄* \param[in] Length: 要删除的长度* \return 返回删除指定长度数据结果* \arg RING_BUFFER_SUCCESS: 删除成功* \arg RING_BUFFER_ERROR: 删除失败*/uint8_t RB_Delete(ring_buffer *rb_handle, uint32_t Length){if(rb_handle->Length < Length)return RING_BUFFER_ERROR ;//已储存的数据量小于需删除的数据量else{if((rb_handle->head + Length) >= rb_handle->max_Length)rb_handle->head = Length - (rb_handle->max_Length - rb_handle->head);elserb_handle->head += Length ; //头指针向前推进,抛弃数据rb_handle->Length -= Length ; //重新记录有效数据长度return RING_BUFFER_SUCCESS ;//已储存的数据量小于需删除的数据量}}/*** \brief 向缓冲区尾部写一个字节* \param[out] rb_handle: 缓冲区结构体句柄* \param[in] data: 要写入的字节* \return 返回缓冲区写字节的结果* \arg RING_BUFFER_SUCCESS: 写入成功* \arg RING_BUFFER_ERROR: 写入失败*/uint8_t RB_Write_Byte(ring_buffer *rb_handle, uint8_t data){//缓冲区数组已满,产生覆盖错误if(rb_handle->Length == (rb_handle->max_Length))return RING_BUFFER_ERROR ;else{*(rb_handle->array_addr + rb_handle->tail) = data;//基地址+偏移量,存放数据rb_handle->Length ++ ;//数据量计数+1rb_handle->tail ++ ;//尾指针后移}//如果尾指针超越了数组末尾,尾指针指向缓冲区数组开头,形成闭环if(rb_handle->tail > (rb_handle->max_Length - 1))rb_handle->tail = 0 ;return RING_BUFFER_SUCCESS ;}/*** \brief 从缓冲区头指针读取一个字节* \param[out] rb_handle: 缓冲区结构体句柄* \param[out] output_addr: 读取的字节保存地址* \return 返回读取状态* \arg RING_BUFFER_SUCCESS: 读取成功* \arg RING_BUFFER_ERROR: 读取失败*/uint8_t RB_Read_Byte(ring_buffer *rb_handle, uint8_t *output_addr){if (rb_handle->Length != 0)//有数据未读出{*output_addr = *(rb_handle->array_addr + rb_handle->head);//读取数据rb_handle->head ++ ;rb_handle->Length -- ;//数据量计数-1//如果头指针超越了数组末尾,头指针指向数组开头,形成闭环if(rb_handle->head > (rb_handle->max_Length - 1))rb_handle->head = 0 ;return RING_BUFFER_SUCCESS ;}return RING_BUFFER_ERROR ;}/*** \brief 向缓冲区尾部写指定长度的数据* \param[out] rb_handle: 缓冲区结构体句柄* \param[out] input_addr: 待写入数据的基地址* \param[in] write_Length: 要写入的字节数* \return 返回缓冲区尾部写指定长度字节的结果* \arg RING_BUFFER_SUCCESS: 写入成功* \arg RING_BUFFER_ERROR: 写入失败*/uint8_t RB_Write_String(ring_buffer *rb_handle, uint8_t *input_addr, uint32_t write_Length){//如果不够存储空间存放新数据,返回错误if((rb_handle->Length + write_Length) > (rb_handle->max_Length))return RING_BUFFER_ERROR ;else{//设置两次写入长度uint32_t write_size_a, write_size_b ;//如果顺序可用长度小于需写入的长度,需要将数据拆成两次分别写入if((rb_handle->max_Length - rb_handle->tail) < write_Length){write_size_a = rb_handle->max_Length - rb_handle->tail ;//从尾指针开始写到储存数组末尾write_size_b = write_Length - write_size_a ;//从储存数组开头写数据//分别拷贝a、b段数据到储存数组中memcpy(rb_handle->array_addr + rb_handle->tail, input_addr, write_size_a);memcpy(rb_handle->array_addr, input_addr + write_size_a, write_size_b);rb_handle->Length += write_Length ;//记录新存储了多少数据量rb_handle->tail = write_size_b ;//重新定位尾指针位置}else//如果顺序可用长度大于或等于需写入的长度,则只需要写入一次{write_size_a = write_Length ;//从尾指针开始写到储存数组末尾memcpy(rb_handle->array_addr + rb_handle->tail, input_addr, write_size_a);rb_handle->Length += write_Length ;//记录新存储了多少数据量rb_handle->tail += write_size_a ;//重新定位尾指针位置if(rb_handle->tail == rb_handle->max_Length)rb_handle->tail = 0 ;//如果写入数据后尾指针刚好写到数组尾部,则回到开头,防止越位}return RING_BUFFER_SUCCESS ;}}/*** \brief 从缓冲区头部读指定长度的数据,保存到指定的地址* \param[out] rb_handle: 缓冲区结构体句柄* \param[out] output_addr: 读取的数据保存地址* \param[in] read_Length: 要读取的字节数* \return 返回缓冲区头部读指定长度字节的结果* \arg RING_BUFFER_SUCCESS: 读取成功* \arg RING_BUFFER_ERROR: 读取失败*/uint8_t RB_Read_String(ring_buffer *rb_handle, uint8_t *output_addr, uint32_t read_Length){if(read_Length > rb_handle->Length)return RING_BUFFER_ERROR ;else{uint32_t Read_size_a, Read_size_b ;if(read_Length > (rb_handle->max_Length - rb_handle->head)){Read_size_a = rb_handle->max_Length - rb_handle->head ;Read_size_b = read_Length - Read_size_a ;memcpy(output_addr, rb_handle->array_addr + rb_handle->head, Read_size_a);memcpy(output_addr + Read_size_a, rb_handle->array_addr, Read_size_b);rb_handle->Length -= read_Length ;//记录剩余数据量rb_handle->head = Read_size_b ;//重新定位头指针位置}else{Read_size_a = read_Length ;memcpy(output_addr, rb_handle->array_addr + rb_handle->head, Read_size_a);rb_handle->Length -= read_Length ;//记录剩余数据量rb_handle->head += Read_size_a ;//重新定位头指针位置if(rb_handle->head == rb_handle->max_Length)rb_handle->head = 0 ;//如果读取数据后头指针刚好写到数组尾部,则回到开头,防止越位}return RING_BUFFER_SUCCESS ;}}/*** \brief 获取缓冲区里已储存的数据长度* \param[in] rb_handle: 缓冲区结构体句柄* \return 返回缓冲区里已储存的数据长度*/uint32_t RB_Get_Length(ring_buffer *rb_handle){return rb_handle->Length ;}/*** \brief 获取缓冲区可用储存空间* \param[in] rb_handle: 缓冲区结构体句柄* \return 返回缓冲区可用储存空间*/uint32_t RB_Get_FreeSize(ring_buffer *rb_handle){return (rb_handle->max_Length - rb_handle->Length) ;}
main.c和makefile文件见前文。
End
「汽车电子嵌入式在CSDN上同步推出AUTOSAR精进之路专栏,本专栏每个模块完全按实际项目中开发及维护过程来详细介绍。模块核心概念介绍、实际需求描述、实际工程配置、特殊需求介绍及背后原理、实际工程使用经验总结。目的是让读者看完每一个章节后能理解原理后根据需求完成一个模块的配置或者解决一个问题。」
点击文章最后左下角的阅读原文可以获取更多信息
或者复制如下链接到浏览器获取更多信息
https://blog.csdn.net/qq_36056498/article/details/132125693
文末福利
2.为便于技术交流,创建了汽车电子嵌入式技术交流群,可尽情探讨AP,CP,DDS,SOME/IP等前沿热点话题,后台回复“加群”即可加入;
注:本文引用了一些第三方工具和文档,若有侵权,请联系作者删除!
推荐阅读
汽车电子嵌入式精彩文章汇总第一期:20210530-20230703
汽车电子嵌入式精彩文章汇总第2期
TC3xx芯片GTM模块-CMU,CCM,TBU详解
TC3xx芯片GTM模块-TOM详解
AUTOSAR架构下PWM模块配置实践
TC3xx芯片GTM模块-TIM详解
AUTOSAR架构下ICU模块配置实践
TC3xx芯片电源管理系统PMS详解
TC3xx DMA模块详解
TC3xx芯片SMU模块详解
如何监控TC3xx芯片PFlash的ECC错误
TC3xx芯片RAM的错误检测
TC3xx芯片的总线内存保护
编译链接专题第1篇-make和makefile介绍
编译链接专题第2篇-初识makefile结构
编译链接专题第3篇-初识makefile中的伪目标
编译链接专题第4篇-变量和变量的不同赋值方式
编译链接专题第5篇-预定义变量的使用
编译链接专题第6篇-变量的高级主题(上)
编译链接专题第7篇-变量的高级主题(下)
编译链接专题第8篇-条件判断语句
End
欢迎点赞,关注,转发,在看,您的每一次鼓励,都是我最大的动力!
汽车电子嵌入式
微信扫描二维码,关注我的公众号
