


摘要

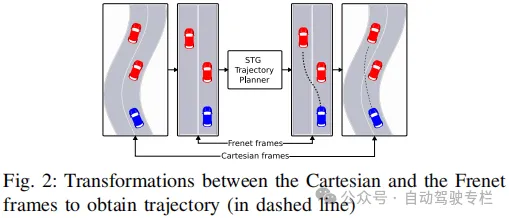
本文介绍了一种用于自动驾驶汽车的在线时空图轨迹规划器。自动驾驶行业预计在未来十年将增长20倍以上,从而激励研究人员进行深入探索。他们的研究主要着重于确保安全性、舒适性和高效率。自动驾驶汽车具有负责一个或者多个上述项的若干模块。在这些模块中,轨迹规划器在车辆安全性和乘客舒适性方面发挥着至关重要的作用。该模块还负责遵守运动学约束和任何适用的道路约束。本文引入了一种新的在线时空图轨迹规划器来生成安全且舒适的轨迹。首先,通过自动驾驶汽车、其周围车辆以及道路上相对于车辆本身的虚拟节点来构建时空图。然后,将该图传给顺序网络,以获取所需的状态。为了支持规划器,还提供了一个简单的行为层,用于确定规划器的运动学约束。此外,本文还提出了一种新型的势场函数来训练网络。最后,在三种不同的复杂驾驶任务中对所提出的规划器进行测试,并且与两种最常用的方法进行性能比较。结果表明,所提出的规划器生成了安全且可行的轨迹,同时在前进方向上实现了相似或者更长的距离以及相当的舒适度。
主要贡献
本文的主要贡献总结如下:
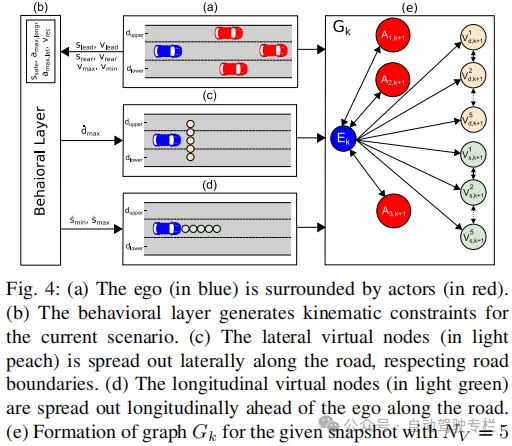
1)本文提出了一种新型的时空图,该图描述了轨迹规划问题,并且加入了道路约束和运动学约束;
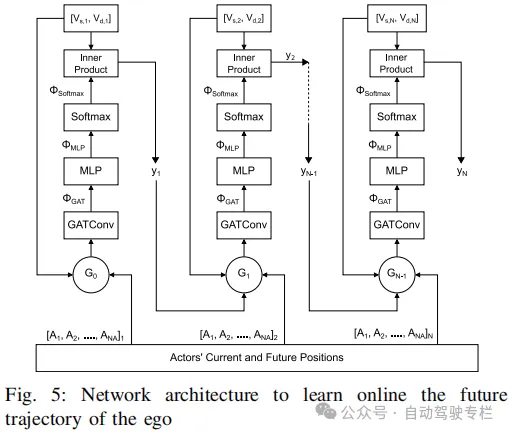
2)本文提出了一种神经网络架构,其能够处理时空图来生成自车的未来规划;
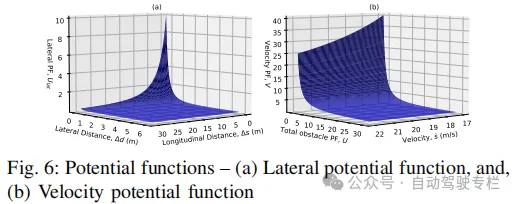
3)本文为架构引入了自定义的势场函数(PFs)来学习;
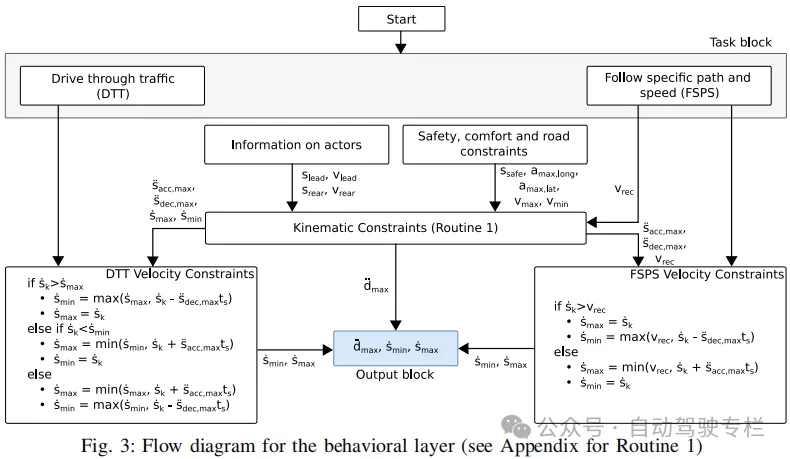
4)本文设计了一个简单的行为层来定义自车的运动学约束。

论文图片和表格



总结
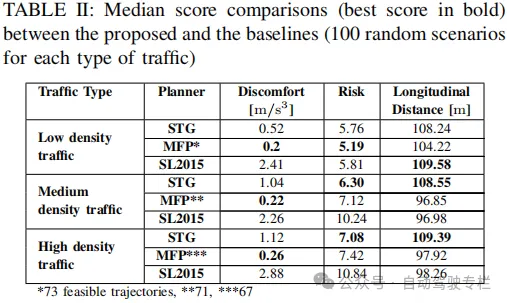
本项工作引入了一种新型的在线时空图轨迹规划器。通过考虑道路边界和运动学约束,使用异构图来定义问题。然后,在顺序神经网络架构下处理这些图,以获得所需的未来轨迹,该轨迹可以描述常见的驾驶行为,例如车道保持、变道、车辆跟随和速度保持。为了使网络学习,还提出了解决安全性和最大速度保持的势场函数。此外,还提出了一个简单的行为层,为规划器提供运动学约束。结果表明,本文所提出的规划器在所有驾驶任务中均成功地生成了可行的轨迹。与基线相比,这些指标指向更好的性能权衡。
今后,希望使用更复杂的行为层来测试所提出的规划器在更多样化的驾驶任务中的有效性。此外,还计划扩展所提出的方法,使其应用于协作的多智能体互联的自动驾驶中。
来源: 自动驾驶专栏
-END-