
ZMC900E 是ZLG致远电子开发的最新一代EtherCAT主站控制器,其核心采用多核异构的应用处理器,内核包括4+1个64位的Arm®Cortex®-A55核,主频2GHz;3个Cortex-R5F内核,主频800MHz。同时板载4GB LPDDR4、8GB eMMC以及32KB FRAM。
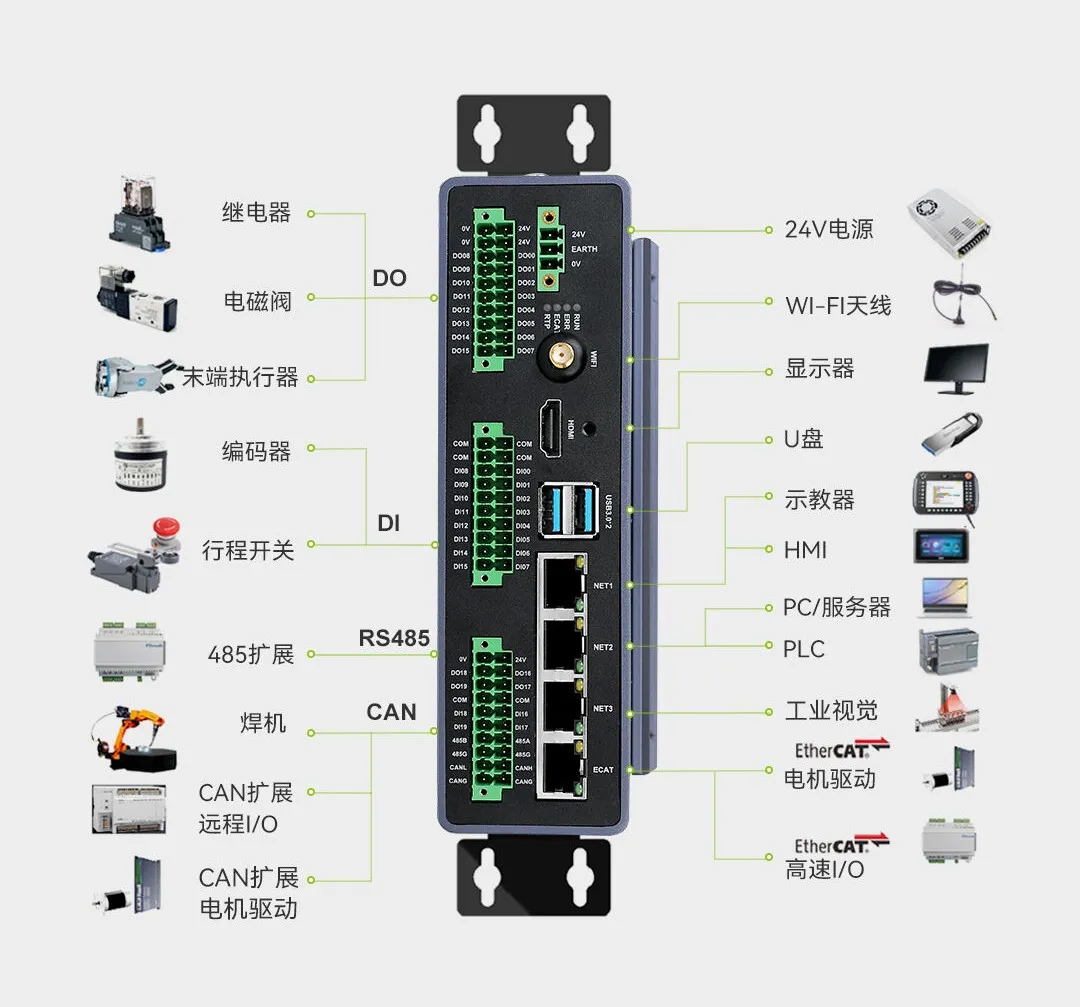
ZMC900E EtherCAT主站控制器为了满足不同的自动化应用需求,集成1路专用EtherCAT口、3路通用以太网、1路CANFD、1路RS485、1路TF卡、1路USB3.0 Host、1路HDMI接口、16路Dl数字输入、16路DO数字输出等接口,灵活满足自动化设备应用需求。
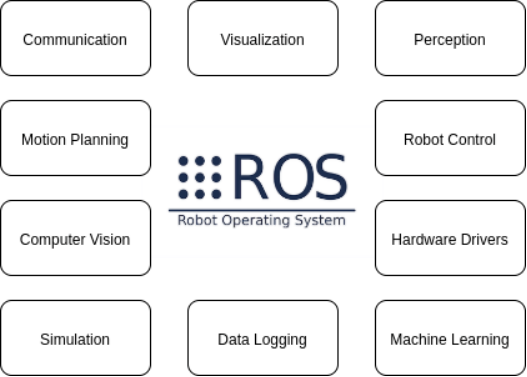
ROS因其强大的功能而备受机器人应用开发者的欢迎,而新一代的ROS2更具有产品化特性,结合新一代高性能的ZMC900E EtherCat控制器将给工业应用带来更多想象力。下面就详细介绍ROS特性以及ROS2在ZMC900E上的安装步骤。
 ROS是什么?
ROS是什么?
 ROS的的优缺点分析
ROS的的优缺点分析
2. 缺点:
ROS2:推动ROS进入产业化与产品化时代ROS2的核心改进之一是实现了实时化和分布式通信。在ROS1中,所有的节点通信都依赖于一个中心化的Master节点。这意味着如果Master节点发生故障,整个系统的通信将中断,导致所有节点功能失效。这种设计限制了ROS1在需要高可靠性和稳定性的工业环境中的应用。
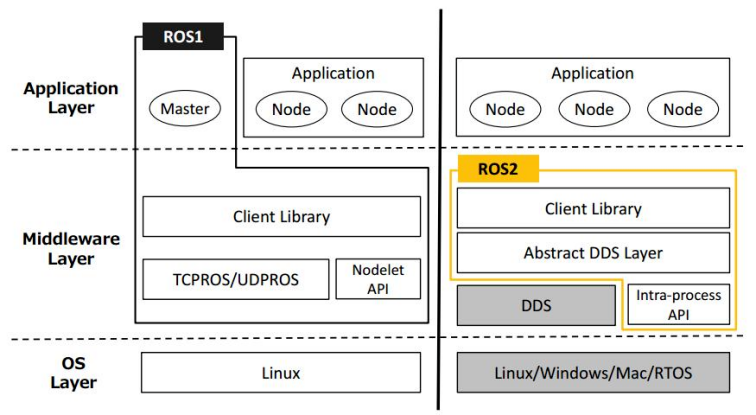
为了克服这一挑战,ROS2引入了Data Distribution Service(DDS)作为其通信基础。DDS是一种广泛应用于国防、民航、工业控制等领域的实时系统数据发布/订阅标准解决方案。通过DDS,ROS2实现了去中心化的通信方式,允许节点之间进行直接通信,无需依赖于Master节点。这种分布式通信方式不仅提高了系统的可靠性和稳定性,还有助于解决多机器人系统中的通信问题。
2. 适应全平台与低性能硬件
在数据安全方面,ROS2引入了数据加密机制,确保通信过程中的数据安全性。这一特性对于需要高度安全保护的工业应用至关重要。
同时,ROS2还支持现代编程语言,如C++和Python。这使得开发者能够使用更加高效和灵活的编程工具来开发机器人应用。
通过引入实时化、分布式通信、跨平台兼容性、低性能硬件适应性、数据加密以及现代编程语言支持等特性,ROS2为机器人技术的产业化与产品化奠定了坚实的基础。随着ROS2的不断发展和完善,我们有理由相信它将在未来的机器人领域中发挥更加重要的作用。
ROS2环境安装sudo cp -a /etc/apt/sources.list /etc/apt/sources.list.baksudo vi /etc/apt/sources.list
2. 替换成以下内容
deb http://mirrors.huaweicloud.com/ubuntu-ports/ bionic main multiverse restricted universedeb http://mirrors.huaweicloud.com/ubuntu-ports/ bionic-backports main multiverse restricted universedeb http://mirrors.huaweicloud.com/ubuntu-ports/ bionic-proposed main multiverse restricted universedeb http://mirrors.huaweicloud.com/ubuntu-ports/ bionic-security main multiverse restricted universedeb http://mirrors.huaweicloud.com/ubuntu-ports/ bionic-updates main multiverse restricted universedeb-src http://mirrors.huaweicloud.com/ubuntu-ports/ bionic main multiverse restricted universedeb-src http://mirrors.huaweicloud.com/ubuntu-ports/ bionic-backports main multiverse restricted universedeb-src http://mirrors.huaweicloud.com/ubuntu-ports/ bionic-proposed main multiverse restricted universedeb-src http://mirrors.huaweicloud.com/ubuntu-ports/ bionic-security main multiverse restricted universedeb-src http://mirrors.huaweicloud.com/ubuntu-ports/ bionic-updates main multiverse restricted universe
3. 安装aptitude包
sudo apt update && sudo apt install aptitude4. 设置语言环境
sudo apt update && sudo apt install localessudo locale-gen en_US en_US.UTF-8sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8export LANG=en_US.UTF-8
5. 需要将 ROS2 apt 存储库添加到系统中,为此,首先使用 apt 授权GPG 密钥
sudo apt update && sudo apt install curl gnupg2 lsb-releasecurl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
6. 然后将存储库添加到源列表
sudo sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list'7. 安装ROS2软件包,设置存储库后,更新apt存储库缓存,安装桌面版
sudo apt update && sudo aptitude install ros-eloquent-desktop 注:安装过程可能出现问题。
问题1:
GPG error: http://packages.ros.org/ros2/ubuntu bionic InRelease: The following signatures couldn't be verified because the public key is not available: NO_PUBKEY F42ED6FBAB17C654
方案1:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
经过上述操作, eloquent版ROS2安装完成。
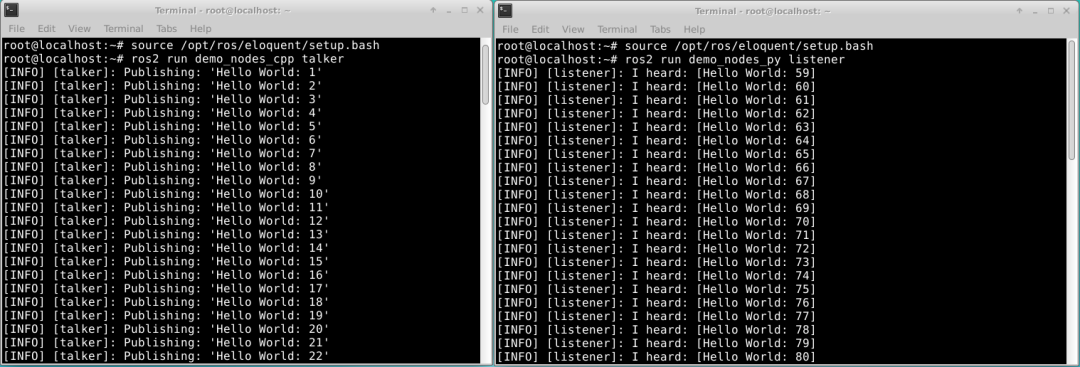
ROS2测试在终端中,更新配置文件,运行talker:
source /opt/ros/eloquent/setup.bashros2 run demo_nodes_cpp talker
在另一个终端中,更新配置文件,运行listener:
source /opt/ros/eloquent/setup.bashros2 run demo_nodes_py listener
EtherCAT 系列文章
【新品上市】ZMC900E 国产高性能EtherCAT总线控制器
【新品上市】ZLG致远电子PCIe EtherCAT通讯卡产品正式发布!
【插针机PLC开发】用AWBlock开发运动逻辑
【插针机HMI开发】用AWTK开发人机界面
【技术分享】EtherCAT 数据帧格式和寻址方式简介
【技术分享】“脱胎换骨”--插针机运动控制
【技术分享】EtherCAT总线如何对从站固件进行升级?
【技术分享】EtherCAT冗余技术如何实现通信线缆断开的补救?
【技术分享】如何精准分析人形机器人运动数据?
【技术分享】为何EtherCAT在运动控制总线中如此受欢迎?
【产品应用】EtherCAT主站控制器系统实时性测试
【产品应用】ZMC900E 国产EtherCAT主站控制器 — 电源口传导骚扰整改
【产品应用】ZMC300E EtherCAT主站控制器实现复杂的运动轨迹规划原理及应用
【产品应用】手把手带你使用ZMC300E绘图
【产品应用】三个步骤,让你的EtherCAT电机转起来
【产品应用】EtherCAT如何保障高效率、高实时性、高灵活性的现场总线通讯
【产品介绍】ZMC601E总线型边缘控制器 — 引领制造型企业数字化转型
【产品介绍】ZMC600E EtherCAT主站控制器全新上市
【产品介绍】ZLG推出新一代工业机器人解决方案,为工业机器人注入新的活力
更多往期文章,请点击“ 阅读原文 ”。