在嵌入式开发中,不可避免的涉及到通讯协议处理,而通讯协议底层都依赖于数据帧的收发。一般帧的收发,尤其是接收有几个特点:一是帧本身不定长,二是每次收到的数据不定,三是存在丢包误码,数据异常等情况。所以能健壮的解决上述问题的协议和数据收发处理非常重要,本文就来分享下其一个实现。实际上我们就是实现链路层。
首先我们大致整理下需求。
1.链路层:设计帧格式,支持不定长包。
2.支持每次收到任意长数据进行处理。
3.在丢包,误码,数据异常时,仅影响本帧,不会导致后续帧接收错误。
4.设计FIFO,实现高效缓存,均衡数据的接收与处理,解耦应用层和底层。
1.首先我们需要支持可变帧长,所以需要一个长度域,这里设计为4字节,可以根据实际应用修改,有些帧长没有这么大,设计为2字节甚至1字节即可。
2.然后我们设置一个两字节的头0x1A 0x2B,用于表示帧的开头,可以设置的特殊一点,减少和有效数据一样的概率,这里设置为2字节是一般两字节和有效数据一样的概率就比较小了,1字节概率会比较大。当然为了进一步减小概率可以将头设置为更长比如4字节,但是没太大必要,因为这里和有效数据一样也没关系,我们仅仅暂时以此作为开头,后面还要根据帧有效性判据判断本帧是否有效,无效则会丢弃该头,往后面继续搜寻头,所以和有效数据一样也没关系,只是这个概率的大小影响校验判断的频繁度,因为找到头接收到指定长度就要进行一次判断是否帧有效, 帧头比较特殊首先就过滤掉了很多,后面判断频次就少了。
3.有效帧判断,这里是重点,是可靠性的保证, 因为前面找到了头,也根据LEN接收到了指定的DATA之后(这里还需要对LEN本身的效范围进行有效性判断),就需要判断接收到的帧是否是有效的,一般使用校验信息来判断,例如使用CRC,CHECKSUM, 奇偶校验等对LEN+DATA进行校验,根据需求,简单的甚至可以用一个固定的TAIL字段用于有效性校验。
判据有两个评价指标,其是矛盾的,要根据实际应用取舍。
1)检测错误的能力, 这是可靠性的保证,因为存在刚好数据中有和头一样的,以此作为HEAD,LEN也是有效范围,而且数据的校验信息也对的情况,毕竟任何一种校验手段都无法百分之百可靠。
所以对于可靠性要求高的使用CRC比使用CHECKSUM和奇偶校验更好,甚至需要增加数据内容更多的校验,来避免非有效帧判断为有效帧。
而对于数据可靠性要求没这么高,但是要求处理速率快的,可以使用CHECKSUM或者奇偶校验,甚至使用固定的TAIL即可。
2)计算复杂性
不同检测能力的校验算法和计算复杂性是矛盾体,所以要综合需求考虑。
以上两者一般是矛盾点,需要综合取舍。
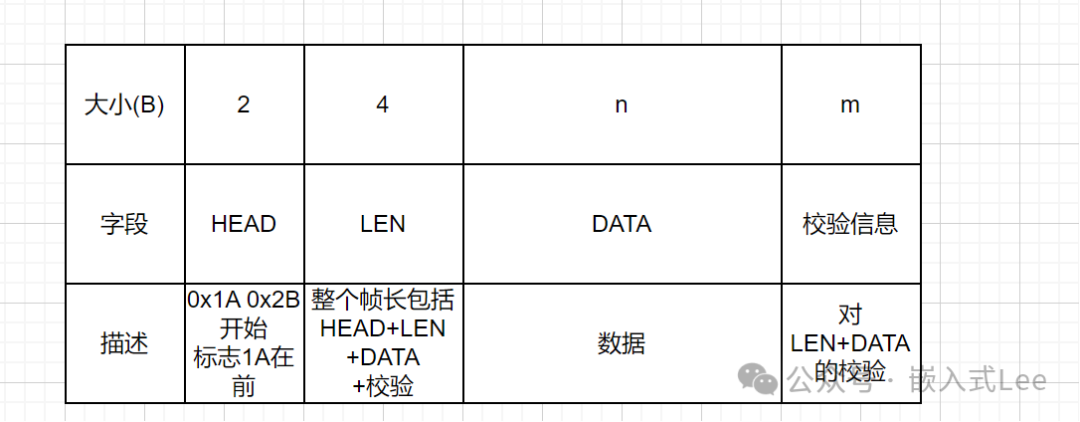
我这里设计如下,实际应用可以根据需求修改各字段
HEAD设置为2字节0x1A 0x2B,0x1A在前;
LEN设置为4字节,因为我的需求需要传输比较长的帧,这里长度为整个帧长,包括HEAD,LEN,DATA,校验。因为方便代码计数已经接收的长度,无需再减去其他区域用于计算当前是否接收到指定长度的数据。
DATA 可以为0长。
校验信息,我这里设置为2字节,对LEN和DATA区域进行校验,HEAD是固定值就没必要进行校验了。作为演示后面我们测试代码就使用固定的2字节0x3C 0x4D。
根据前面的帧格式设计,帧接收有3个阶段:接收头,接收LEN,接收DATA和校验信息帧有效性判断。
所以使用状态机进行处理是最自然想到的方式。
接收到指定的数据后,就流入该状态机,实现帧的处理。
处理流程如下:
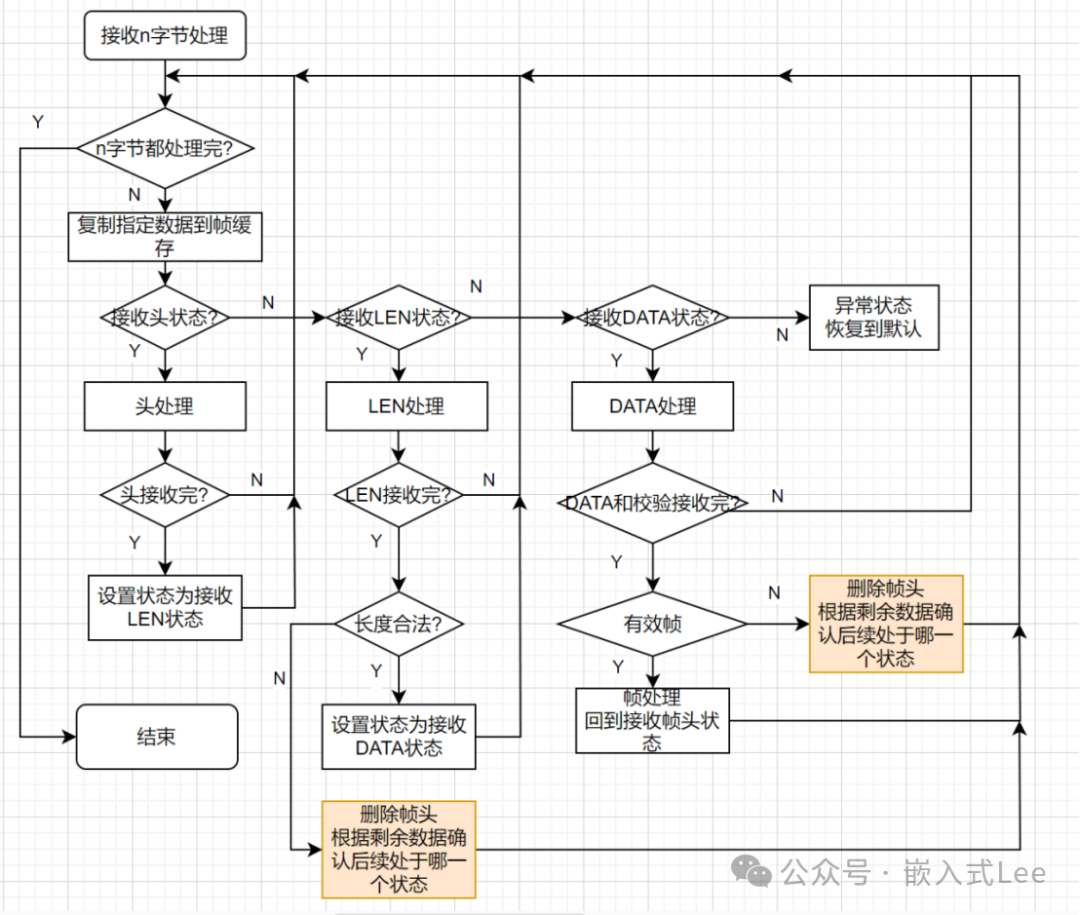
需要重点关注的是,如上黄色部分,帧校验不合法或者长度不合法时,不能删除整个帧,只能删除帧头,继续索引后续内容确认后续处于什么状态。因为删除整个内容会导致如果后面有合法帧也会被删掉有效数据,一个典型的案例就是第一个帧丢失数据,第二帧正确时的场景。
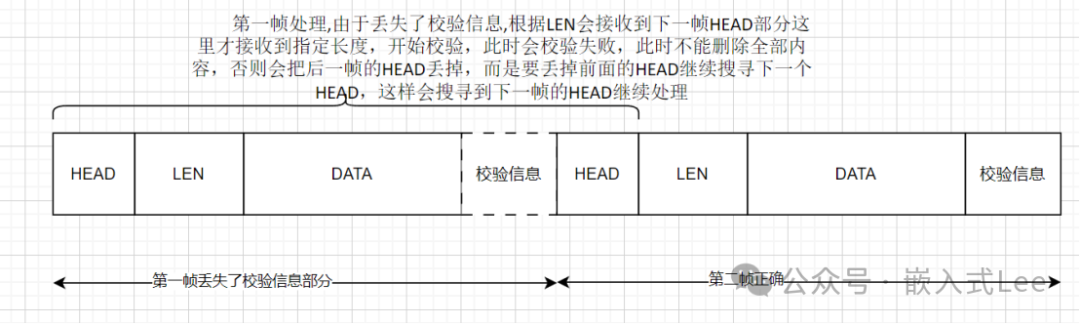
如下所示:
第一帧处理,由于丢失了校验信息,根据LEN,会接收到下一帧HEAD部分,至此才接收够指定长度,开始校验,此时会校验失败,此时不能删除全部内容,否则会把后一帧的HEAD丢掉,而是要丢掉前面的HEAD继续搜寻下一个HEAD,这样会搜寻到下一帧的HEAD继续处理。当然这里所示恰好是到HEAD部分,也可能前一帧丢失更多,那么接收到了后一帧的更靠后区域,此时也要根据数据,相应的修改对应的所处状态机阶段。
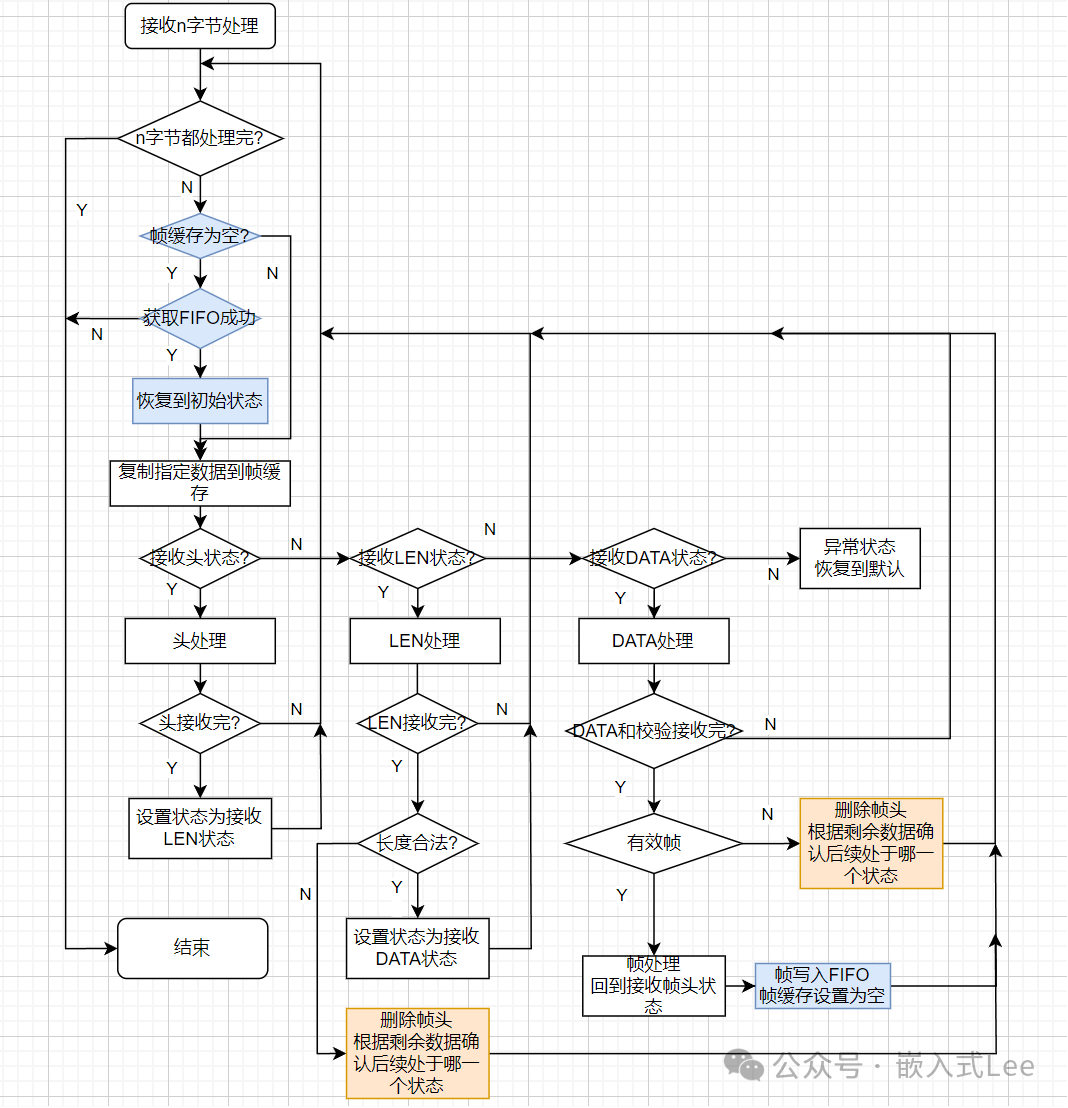
以上实现了帧的处理,实际应用中,收到一帧后,后续还有源源不断的帧过来,此时就进行帧处理可能会来不及,所以可以设计帧FIFO先将接收到的帧缓存,然后在其他地方循环查询该缓存进行帧处理,一方面实现数据流的均衡一方面实现底层和应用的解耦。
此时上述流程图就需要增加获取FIFO和将数据写入FIFO的操作。
FIFO的设计参考前面的文章
《超级精简系列之十九:超级精简的循环FIFO池,C实现》https://mp.weixin.qq.com/s/PV-sUxzTEKbobgyt4BKRlA
Fifo_pool.c
#include#include "fifo_pool.h"/*** \fn fifo_pool_in* 往fifo pool里写数据* \param[in] dev \ref fifo_pool_st* \param[in] bu/ffer 待写入的数据* \param[in] len 待写入的长度* \retval 返回实际写入的数据量*/uint32_t fifo_pool_in(fifo_pool_st* dev, uint8_t* buffer, uint32_t len){uint8_t* p;uint32_t ret;#if FIFO_POOL_PARAM_CHECK/* 参数检查 */if((dev == 0) || (buffer == 0) || (len == 0)){return 0;}if(dev->buffer == 0){return 0;}if(len > dev->pool_len){return 0;}#endif#if FIFO_POOL_SUPPORT_LOCKif(dev->mutex_lock != 0){dev->mutex_lock(dev->mutex);}#endifif(dev->pool_cnt >= dev->pool_num){/* 满 */ret = 0;}else{p = dev->buffer + dev->in * dev->pool_len;memcpy(p,buffer,len);dev->in++;if(dev->in >= dev->pool_num) /* 用减法代替取余 */{dev->in -= dev->pool_num;}dev->pool_cnt++;}#if FIFO_POOL_SUPPORT_LOCKif(dev->mutex_unlock != 0){dev->mutex_unlock(dev->mutex);}#endifret = len;return ret;}/*** \fn fifo_pool_getpoolnum* 获取有效的pool数* \param[in] dev \ref fifo_pool_st*/uint32_t fifo_pool_getpoolnum(fifo_pool_st* dev){uint32_t num;#if FIFO_POOL_PARAM_CHECK/* 参数检查 */if(dev == 0){return 0;}#endif#if FIFO_POOL_SUPPORT_LOCKif(dev->mutex_lock != 0){dev->mutex_lock(dev->mutex);}#endifnum = dev->pool_cnt;#if FIFO_POOL_SUPPORT_LOCKif(dev->mutex_unlock != 0){dev->mutex_unlock(dev->mutex);}#endifreturn num;}/*** \fn fifo_pool_out* 从fifo pool读出数据* \param[in] dev \ref fifo_pool_st* \param[in] buffer 存读出的数据* \param[in] len 需要读出的数据长度* \retval 返回实际读出的数据量 返回0表示满*/uint32_t fifo_pool_out(fifo_pool_st* dev, uint8_t* buffer, uint32_t len){uint8_t* p;uint32_t ret;#if FIFO_POOL_PARAM_CHECK/* 参数检查 */if((dev == 0) || (buffer == 0) || (len == 0)){return 0;}if(dev->buffer == 0){return 0;}if(len > dev->pool_len){return 0;}#endif#if FIFO_POOL_SUPPORT_LOCKif(dev->mutex_lock != 0){dev->mutex_lock(dev->mutex);}#endifif(dev->pool_cnt == 0){/* 空 */ret = 0;}else{p = dev->buffer + dev->out * dev->pool_len;memcpy(buffer, p, len);dev->out++;if(dev->out >= dev->pool_num) /* 用减法代替取余 */{dev->out -= dev->pool_num;}dev->pool_cnt--;}#if FIFO_POOL_SUPPORT_LOCKif(dev->mutex_unlock != 0){dev->mutex_unlock(dev->mutex);}#endifret = len;return ret;}/*** \fn fifo_pool_init* 初始化fifo pool* \param[in] dev \ref fifo_pool_st* \retval 0 成功* \retval 其他值失败*/int fifo_pool_init(fifo_pool_st* dev){#if FIFO_POOL_PARAM_CHECK/* 参数检查 */if(dev == 0){return -1;}#endif#if FIFO_POOL_SUPPORT_LOCKdev->in = 0;dev->pool_cnt = 0;dev->out = 0;if(dev->mutex_init != 0){dev->mutex_init(dev->mutex);}#endifreturn 0;}/*** \fn fifo_pool_deinit* 解除初始化fifo pool* \param[in] dev \ref fifo_pool_st* \retval 0 成功* \retval 其他值失败*/int fifo_pool_deinit(fifo_pool_st* dev){#if FIFO_POOL_PARAM_CHECK/* 参数检查 */if(dev == 0){return -1;}#endif#if FIFO_POOL_SUPPORT_LOCKif(dev->mutex_destroy != 0){dev->mutex_destroy(dev->mutex);}#endifreturn 0;}/*** \fn fifo_pool_getinpool* 获取fifo pool当前in位置pool* \param[in] dev \ref fifo_pool_st* \retval 返回当前in位置的pool地址, 返回0表示空*/uint8_t* fifo_pool_getinpool(fifo_pool_st* dev){uint8_t* ret;#if FIFO_POOL_PARAM_CHECK/* 参数检查 */if(dev == 0){return 0;}#endif#if FIFO_POOL_SUPPORT_LOCKif(dev->mutex_lock != 0){dev->mutex_lock(dev->mutex);}#endifif(dev->pool_cnt >= dev->pool_num){/* 满 */ret = 0;}else{ret = (dev->buffer + dev->in * dev->pool_len);}#if FIFO_POOL_SUPPORT_LOCKif(dev->mutex_unlock != 0){dev->mutex_unlock(dev->mutex);}#endifreturn ret;}/*** \fn fifo_pool_submitinpool* 提交当前in位置pool* \param[in] dev \ref fifo_pool_st*/void fifo_pool_submitinpool(fifo_pool_st* dev){#if FIFO_POOL_PARAM_CHECK/* 参数检查 */if(dev == 0){return;}#endif#if FIFO_POOL_SUPPORT_LOCKif(dev->mutex_lock != 0){dev->mutex_lock(dev->mutex);}#endifif(dev->pool_cnt >= dev->pool_num){/* 满 */}else{dev->in++;if(dev->in >= dev->pool_num) /* 用减法代替取余 */{dev->in -= dev->pool_num;}dev->pool_cnt++;}#if FIFO_POOL_SUPPORT_LOCKif(dev->mutex_unlock != 0){dev->mutex_unlock(dev->mutex);}#endif}/*** \fn fifo_pool_getoutpool* 获取fifo pool当前out位置的pool* \param[in] dev \ref fifo_pool_st* \retval 返回当前out位置的pool地址, 返回0表示空*/uint8_t* fifo_pool_getoutpool(fifo_pool_st* dev){uint8_t* ret;#if FIFO_POOL_PARAM_CHECK/* 参数检查 */if(dev == 0){return 0;}#endif#if FIFO_POOL_SUPPORT_LOCKif(dev->mutex_lock != 0){dev->mutex_lock(dev->mutex);}#endifif(dev->pool_cnt == 0){/* 空 */ret = 0;}else{ret = (dev->buffer + dev->out * dev->pool_len);}#if FIFO_POOL_SUPPORT_LOCKif(dev->mutex_unlock != 0){dev->mutex_unlock(dev->mutex);}#endifreturn ret;}/*** \fn fifo_pool_releaseoutpool* 释放当前out位置的pool* \param[in] dev \ref fifo_pool_st*/void fifo_pool_releaseoutpool(fifo_pool_st* dev){#if FIFO_POOL_PARAM_CHECK/* 参数检查 */if(dev == 0){return;}#endif#if FIFO_POOL_SUPPORT_LOCKif(dev->mutex_lock != 0){dev->mutex_lock(dev->mutex);}#endifif(dev->pool_cnt == 0){/* 空 */}else{dev->out++;if(dev->out >= dev->pool_num) /* 用减法代替取余 */{dev->out -= dev->pool_num;}dev->pool_cnt--;}#if FIFO_POOL_SUPPORT_LOCKif(dev->mutex_unlock != 0){dev->mutex_unlock(dev->mutex);}#endif}
Fifo_pool.h
extern "C" {/*** \struct fifo_pool_st* FIFO_POOL缓冲区结构.*/typedef struct{uint32_t in; /**< 写入索引 */uint32_t out; /**< 读出索引 */uint32_t pool_cnt; /**< 有效数据块数 */uint32_t pool_len; /**< 每个块长度 */uint32_t pool_num; /**< 最大块数 */uint8_t* buffer; /**< 缓存,用户分配 *//* 以下用于临界段管理 */void* mutex; /**< 互斥量 */void (*mutex_init)(void* mutex); /**< 互斥量初始化 */void (*mutex_destroy)(void* mutex); /**< 删除互斥量 */void (*mutex_lock)(void* mutex); /**< 获取互斥量 */void (*mutex_unlock)(void* mutex); /**< 释放互斥量 */} fifo_pool_st;/*** \fn fifo_pool_in* 往fifo pool里写数据* \param[in] dev \ref fifo_pool_st* \param[in] buffer 待写入的数据* \param[in] len 待写入的长度* \retval 返回实际写入的数据量*/uint32_t fifo_pool_in(fifo_pool_st* dev, uint8_t* buffer, uint32_t len);/*** \fn fifo_pool_getpoolnum* 获取有效的pool数* \param[in] dev \ref fifo_pool_st*/uint32_t fifo_pool_getpoolnum(fifo_pool_st* dev);/*** \fn fifo_pool_out* 从fifo pool读出数据* \param[in] dev \ref fifo_pool_st* \param[in] buffer 存读出的数据* \param[in] len 需要读出的数据长度* \retval 返回实际读出的数据量 返回0表示满*/uint32_t fifo_pool_out(fifo_pool_st* dev, uint8_t* buffer, uint32_t len);/*** \fn fifo_pool_init* 初始化fifo pool* \param[in] dev \ref fifo_pool_st* \retval 0 成功* \retval 其他值失败*/int fifo_pool_init(fifo_pool_st* dev);/*** \fn fifo_pool_deinit* 解除初始化fifo pool* \param[in] dev \ref fifo_pool_st* \retval 0 成功* \retval 其他值失败*/int fifo_pool_deinit(fifo_pool_st* dev);/*** \fn fifo_pool_getinpool* 获取fifo pool当前in位置pool* \param[in] dev \ref fifo_pool_st* \retval 返回当前in位置的pool地址, 返回0表示空*/uint8_t* fifo_pool_getinpool(fifo_pool_st* dev);/*** \fn fifo_pool_submitinpool* 提交当前in位置pool* \param[in] dev \ref fifo_pool_st*/void fifo_pool_submitinpool(fifo_pool_st* dev);/*** \fn fifo_pool_getoutpool* 获取fifo pool当前out位置的pool* \param[in] dev \ref fifo_pool_st* \retval 返回当前out位置的pool地址, 返回0表示空*/uint8_t* fifo_pool_getoutpool(fifo_pool_st* dev);/*** \fn fifo_pool_releaseoutpool* 释放当前out位置的pool* \param[in] dev \ref fifo_pool_st*/void fifo_pool_releaseoutpool(fifo_pool_st* dev);}
Frame.c
#include#include "frame.h"/*** @fn frame_move_2_head* @brief 调整移动到头开始处* @param buffer 数据,可能会移动数据* @param len 数据长度指针,可能会回写值* @return*/static int frame_move_2_head(uint8_t* buffer, uint32_t* len){int findhead = 0;int headidx = 0;uint8_t* p;uint8_t* dst;uint8_t* src;uint8_t mvlen;uint8_t rmlen;if(*len < FRAME_HEAD_LEN){/* 不到HEAD长不处理 */return 0;}else{/* 查找头的位置 */for(uint32_t i=0; i<(*len-(FRAME_HEAD_LEN-1)); i++){p = buffer+i;if(FRAME_GET_HEAD(p) == FRAME_HEAD){headidx = i;findhead = 1;break;}}}if(findhead != 0){/* 找到头,将头headidx移动到最开始处 */}else{/* 没有找到头,则只保留FRAME_HEAD_LEN-1个数据 */headidx = *len - (FRAME_HEAD_LEN-1);}rmlen = headidx; /* 删除的长度 */mvlen = *len - headidx; /* 待移动的数据的长度*/dst = buffer; /* 目的地址 */src = buffer+headidx; /* 源头地址 */for(uint32_t i=0; i{*dst++ = *src++;}*len -= rmlen;return 0;}/*** @fn frame_remove_head* @brief 删除头,然后调整移动到下一个头开始处* @param buffer 数据,可能会移动数据* @param len 数据长度指针,可能会回写值* @return*/static int frame_remove_head(uint8_t* buffer, uint32_t* len){/* 先删除一字节,然后调用frame_move_2_head移动到下一个头处 */if(*len < FRAME_HEAD_LEN){return 0;}for(uint32_t i=0; i<(*len-1); i++){buffer[i] = buffer[i+1];}*len -= 1;frame_move_2_head(buffer, len);return 0;}/*** @fn frame_init* @brief 状态初始化* @param dev \ref frame_dev_st* @param check \ref frame_check_cb* @param fifo_pool_dev \ref fifo_pool_st*/void frame_init(frame_dev_st* dev, frame_check_cb check, fifo_pool_st* fifo_pool_dev){#if FRAME_PARAM_CHECKif(dev == 0){return;}#endifdev->buffer = 0;dev->len = 0;dev->state = FRAME_STATE_HEAD;dev->fifo_pool_dev = fifo_pool_dev;dev->check = check;}/*** @fn frame_handle* @brief 数据处理* @param dev \ref frame_dev_st* @param buffer 数据缓存* @param len 数据长度*/int frame_handle(frame_dev_st* dev, uint8_t* buffer, uint32_t len){uint32_t tohandlelen = len;uint32_t needlen = 0;uint32_t cplen = 0;uint8_t* p_data = buffer;#if FRAME_PARAM_CHECKif((dev == 0) || (buffer == 0) || (len == 0)){return -1;}#endifdo{if(dev->buffer == 0){dev->buffer = fifo_pool_getinpool(dev->fifo_pool_dev);if(dev->buffer != 0){/* 恢复到默认状态 */dev->len = 0;dev->state = FRAME_STATE_HEAD;}else{/* 获取fifo失败 */return -2;}}switch(dev->state){case FRAME_STATE_HEAD:if(dev->len < FRAME_HEAD_LEN){needlen = FRAME_HEAD_LEN - dev->len; /* 计算HEAD还需要的长度 */cplen = needlen > tohandlelen ? tohandlelen : needlen; /* 计算本次可以拷贝进来的数据 */memcpy(dev->buffer+dev->len,p_data,cplen); /* 拷贝本次的数据到缓存 */p_data += cplen; /* 待处理数据指针递增 */dev->len += cplen; /* 已经接收长度递增 */tohandlelen -= cplen; /* 剩余待处理数据递减 */if(dev->len >= FRAME_HEAD_LEN){/* 足够头的数据,进行头处理 */uint8_t* p = dev->buffer;if(FRAME_GET_HEAD(p) == FRAME_HEAD){/* 找到头,进行到下一阶段 */dev->state = FRAME_STATE_LEN;}else{/* 没有找到头删除一字节,继续头处理 */dev->len--;dev->buffer[0] = dev->buffer[1];}}else{/* 还不够头的数据 继续处理 */}}else{/* 此状态不应该出现 */}break;case FRAME_STATE_LEN:if(dev->len < (FRAME_HEAD_LEN+FRAME_LEN_LEN)){needlen = (FRAME_HEAD_LEN+FRAME_LEN_LEN) - dev->len; /* 计算HEAD+LEN还需要的长度 */cplen = needlen > tohandlelen ? tohandlelen : needlen; /* 计算本次可以拷贝进来的数据 */memcpy(dev->buffer+dev->len,p_data,cplen); /* 拷贝本次的数据到缓存 */p_data += cplen; /* 待处理数据指针递增 */dev->len += cplen; /* 已经接收长度递增 */tohandlelen -= cplen; /* 剩余待处理数据递减 */if(dev->len >= FRAME_HEAD_LEN+FRAME_LEN_LEN){/* 足够HEAD+LEN的数据,进行LEN处理 */uint8_t* p = dev->buffer+FRAME_HEAD_LEN;uint32_t len = FRAME_GET_LEN(p);/* 一定要检查长度域,否则异常的长度将导致永远收不到异常长度的数据 */if((len > dev->fifo_pool_dev->pool_len) || (len < (FRAME_HEAD_LEN+FRAME_LEN_LEN))){/* 长度超过范围 删除HEAD到下一个HEAD,根据长度转到指定状态 */frame_remove_head(dev->buffer, &(dev->len));if(dev->len < FRAME_HEAD_LEN){dev->state = FRAME_STATE_HEAD;}else if(dev->len < (FRAME_HEAD_LEN+FRAME_LEN_LEN)){dev->state = FRAME_STATE_LEN;}else{dev->state = FRAME_STATE_DATA;}}else{/* 长度在范围内 */dev->state = FRAME_STATE_DATA;}}else{/* 还不够HEAD+LEN的数据 继续处理 */}}else{/* 此状态不应该出现 */}break;case FRAME_STATE_DATA:{uint8_t* p = dev->buffer+FRAME_HEAD_LEN;uint32_t len = FRAME_GET_LEN(p);/* 一定要检查长度域,因为长度域如果异常大于缓存大小,这里将永远进不来 */if(dev->len <= len){needlen = len - dev->len; /* 计算HEAD+LEN+data还需要的长度 */cplen = needlen > tohandlelen ? tohandlelen : needlen; /* 计算本次可以拷贝进来的数据 */memcpy(dev->buffer+dev->len,p_data,cplen); /* 拷贝本次的数据到缓存 */p_data += cplen; /* 待处理数据指针递增 */dev->len += cplen; /* 已经接收长度递增 */tohandlelen -= cplen; /* 剩余待处理数据递减 */if(dev->len >= len){/* 足够HEAD+LEN+data的数据,进行帧有效性判断处理 */if(dev->check != 0){if(dev->check(p,dev->len-FRAME_HEAD_LEN) == 0){/* 校验成功 入FIFO, 新的开始*/fifo_pool_submitinpool(dev->fifo_pool_dev);dev->buffer = 0;dev->len = 0;dev->state = FRAME_STATE_HEAD;}else{/* 校验失败 删除HEAD到下一个HEAD,根据长度转到指定状态 */frame_remove_head(dev->buffer, &(dev->len));if(dev->len < FRAME_HEAD_LEN){dev->state = FRAME_STATE_HEAD;}else if(dev->len < (FRAME_HEAD_LEN+FRAME_LEN_LEN)){dev->state = FRAME_STATE_LEN;}else{dev->state = FRAME_STATE_DATA;}}}else{/* 没有实现该接口则默认认为有效 */fifo_pool_submitinpool(dev->fifo_pool_dev);dev->buffer = 0;dev->len = 0;dev->state = FRAME_STATE_HEAD;}}else{/* 还不够HEAD+LEN+data的数据 继续处理 */}}else{/* 此状态不应该出现 */}}break;default:break;}}while(tohandlelen > 0);return 0;}/*** @fn frame_get* @brief 获取帧* @param dev \ref frame_dev_st* @return \ref 帧缓存地址*/void* frame_get(frame_dev_st* dev){#if FRAME_PARAM_CHECKif(dev == 0){return 0;}#endifreturn fifo_pool_getoutpool(dev->fifo_pool_dev);}/*** @fn frame_release* @brief 释放帧* @param dev \ref frame_dev_st* @param frame 帧缓存地址*/void frame_release(frame_dev_st* dev){#if FRAME_PARAM_CHECKif(dev == 0){return;}#endifreturn fifo_pool_releaseoutpool(dev->fifo_pool_dev);}
Frame.h
/* HEAD内容,长度,和获取HEAD的宏 *//* LEN长度,和获取LEN的宏 */typedef int (*frame_check_cb)(uint8_t* buffer, uint32_t len); /**< 帧有效性判断回调 返回0校验成功 其他值校验失败 buffer是从LEN开始, LEN是buffer长度 *//*** @enum frame_state_e* @brief 帧状态机状态枚举*/typedef enum{FRAME_STATE_HEAD, /**< 接收帧头状态 */FRAME_STATE_LEN, /**< 接收长度状态 */FRAME_STATE_DATA, /**< 接收数据状态 */} frame_state_e;/*** @struct frame_dev_st* @brief 帧状态机数据结构*/typedef struct{frame_state_e state; /**< 当前状态 */uint32_t len; /**< 已经接收的数据长度 */uint8_t* buffer; /**< 帧缓存 */fifo_pool_st* fifo_pool_dev; /**< \ref fifo_pool_st */frame_check_cb check; /**< 帧有效性判断 */} frame_dev_st;/*** @fn frame_init* @brief 状态初始化* @param dev \ref frame_dev_st* @param check \ref frame_check_cb* @param fifo_pool_dev \ref fifo_pool_st*/void frame_init(frame_dev_st* dev, frame_check_cb check, fifo_pool_st* fifo_pool_dev);/*** @fn frame_handle* @brief 数据处理* @param dev \ref frame_dev_st* @param buffer 数据缓存* @param len 数据长度*/int frame_handle(frame_dev_st* dev, uint8_t* buffer, uint32_t len);/*** @fn frame_get* @brief 获取帧* @param dev \ref frame_dev_st* @return \ref 帧缓存地址*/void* frame_get(frame_dev_st* dev);/*** @fn frame_release* @brief 释放帧* @param dev \ref frame_dev_st* @param frame 帧缓存地址*/void frame_release(frame_dev_st* dev);
测试数据如下
static uint8_t test_data[]={0x1A,0x2B,0x0A,0x00,0x00,0x00,0x01,0x01,0x3C,0x4D, /* OK */0x1A,0x2B,0x0A,0x00,0x00,0x00,0x02,0x02,0x3C,0x4E, /* NG 模拟校验错误 */0x1A,0x2B,0x0A,0x00,0x00,0x00,0x03,0x03,0x3C,0x4D, /* OK */0x1A,0x2B,0x0A,0x00,0x00,0x00,0x04,0x3C,0x4D, /* NG 模拟丢数 */0x1A,0x2B,0x0A,0x00,0x00,0x00,0x05,0x05,0x3C,0x4D, /* OK */0x1A,0x2B,0x0B,0x00,0x00,0x00,0x06,0x3C,0x4D, /* NG 模拟长度错误和丢数 */0x1A,0x2B,0x0A,0x00,0x00,0x00,0x07,0x07,0x3C,0x4D, /* OK */0x1A,0x2B,0x09,0x00,0x00,0x00,0x08,0x3C,0x4D, /* OK */0x1A,0x2B,0x0A,0x00,0x00,0x00,0x09,0x09,0x3C,0x4D, /* OK */0x1A,0x2B,0x0A,0x00,0x00,0x80,0x0A,0x0A,0x3C,0x4D, /* NG 模拟长度异常大*/0x1A,0x2B,0x0A,0x00,0x00,0x00,0x0B,0x0B,0x3C,0x4D, /* OK */0x1A,0x2B,0x0B,0x00,0x00,0x00,0x0C,0x0C,0x3C,0x4D, /* NG 模拟长度域比实际大 */0x1A,0x2B,0x0A,0x00,0x00,0x00,0x0D,0x0D,0x3C,0x4D, /* OK */0x1A,0x2B,0x09,0x00,0x00,0x00,0x0E,0x0E,0x3C,0x4D, /* NG 模拟长度域比实际小 */0x1A,0x2B,0x00,0x00,0x00,0x00,0x3C,0x4D, /* NG 长度域小于6 */0x1A,0x2B,0x06,0x00,0x00,0x00, /* NG 0数据 */0x1A,0x1A,0x09,0x00,0x00,0x00,0x10,0x3C,0x4D, /* NG 模拟HEAD错误 */0x1A,0x2B,0x1A,0x2B,0x1A,0x2B,0x1A,0x2B,0x3C,0x4D, /* NG 模拟数据中有HEAD */0x1A,0x2C,0x09,0x00,0x00,0x00,0x11,0x3C,0x4D, /* NG 模拟HEAD错误 */0x1A,0x2B,0x0A,0x00,0x00,0x00,0x12,0x12,0x3C,0x4D, /* OK */0x1A,0x2B,0x08,0x00,0x00,0x00,0x3C,0x4D, /* OK 0数据 */};
在一个线程中模拟数据输入处理
static uint32_t sendlen=0;uint32_t randlen=0;srand(time(NULL));randlen = rand()%sizeof(test_data)+1;if((sendlen + randlen) > sizeof(test_data)){frame_handle(&s_frame_dev,&(test_data[sendlen]),sizeof(test_data)-sendlen);frame_handle(&s_frame_dev,test_data,(sendlen + randlen) - sizeof(test_data));}else{frame_handle(&s_frame_dev,&(test_data[sendlen]),randlen);}sendlen += randlen;sendlen %= sizeof(test_data);
另外一个线程模拟获取帧
while(1){uint8_t* buffer = frame_get();if(buffer != 0){buffer+=FRAME_HEAD_LEN;uint32_t len = FRAME_GET_LEN(buffer);printf("len:%d\n",len);buffer-=FRAME_HEAD_LEN;for(uint32_t i=0;i{printf("%02x ",buffer[i]);}printf("\n");frame_release(buffer);}delay(10);}return 0;
测试如下符合预期
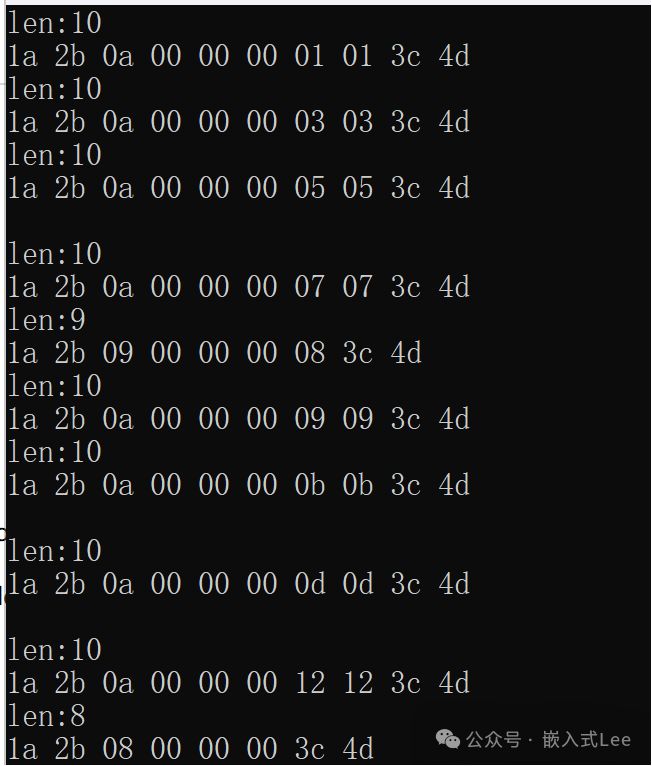
以上基于状态机和FIFO实现了高效健壮的帧接收处理,代码具备可移植性,可以直接作为轮子嵌入到自己的项目中使用。
以下几点需要注意:
一定检查长度域;
错误帧不要全部丢弃已经接收的数据,而是只丢弃一个字节,继续往下搜索头;
根据实际选用帧有效判断方式。
