

点击蓝字 关注我们
SUBSCRIBE to US
SONGNAN BAI, RUNZE DING, SONG LI, AND BINGXUAN PU
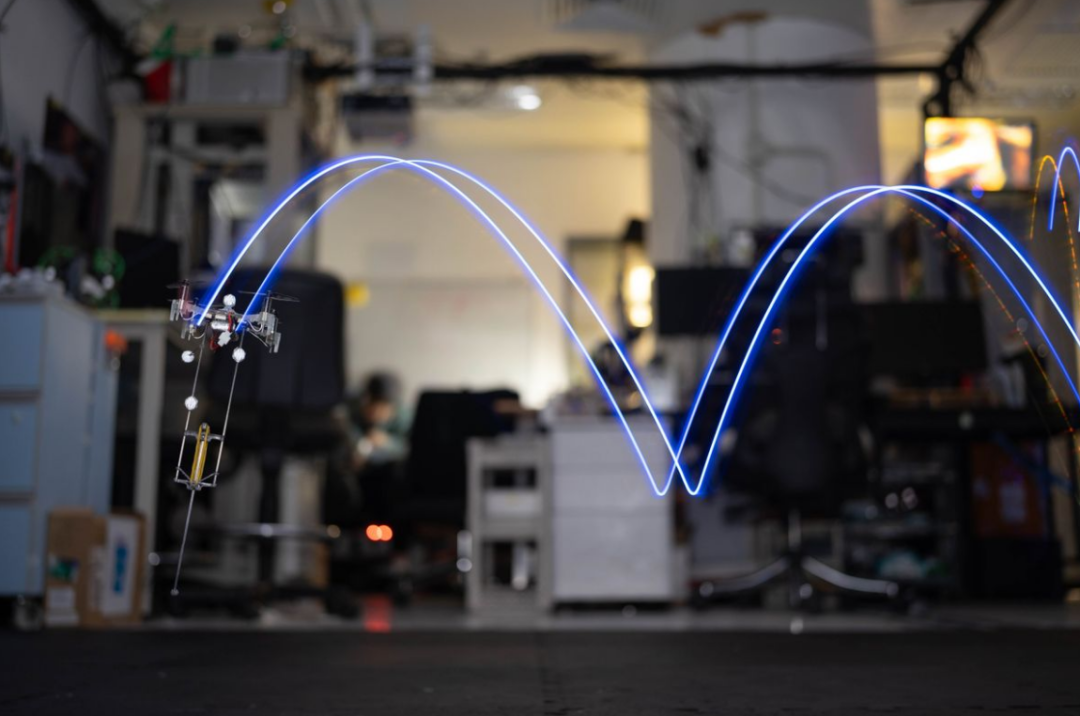
据悉,常规的机器人研发通常是从地面开始,然后通过跳跃,将空中相位融入它们的运动中。但是,空中机器人没有理由不能通过在飞行中增加跳跃地面阶段来从另一个方向跳跃接近。Hopcopter是我(作者,以下简称我)见过的第一个尝试这种方法的机器人,它非常有效,能够将一个小的四旋翼机和一条有弹性的腿结合在一起 —— 它可以跳跃和飞行,并以令人难以置信的速度和精度旋转。
SONGNAN BAI, RUNZE DING, SONG LI, AND BINGXUAN PU
Hopcopter是多模式的,在一个稍微更严格的意义上来说:它的两种模式是飞行和间歇性飞行。但间歇性飞行非常重要,因为减少飞行阶段会给Hopcopter带来与鸟类相同的效率优势。就其本身而言,像Hopcopter这样大小的四旋翼飞行器可以在空中停留约400秒,而Hopcopter则可以连续跳跃20分钟以上。如果你的目标是覆盖尽可能多的距离,Hopcopter可能不如无腿四旋翼机有效。如果你的目标是检查或搜救,它确保了在野外测试中跨越不同地形的稳健性能。耐力试验突出了间歇推力实质性操作时间的延长,导致与连续飞行相比的显著的动力效率收益。
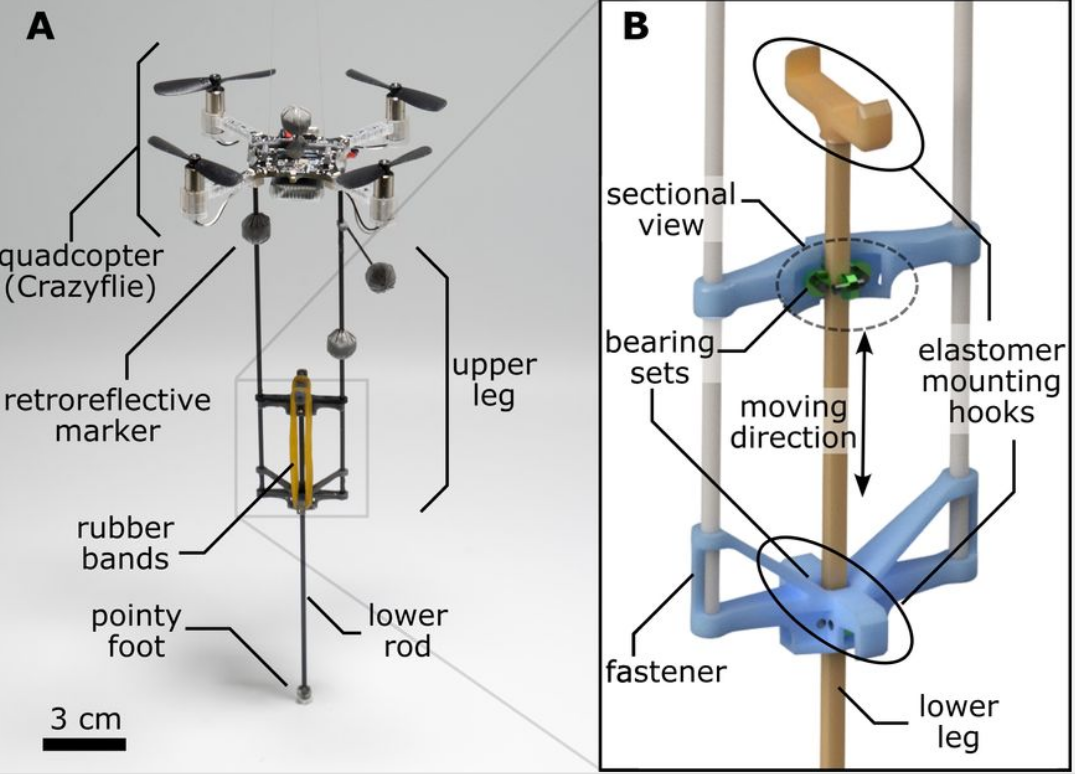
Hopcopter将微型四轴飞行器与伸缩腿机制相结合,该伸缩腿包括一个刚性的上部分,一个作为下部分的滑杆,以及作为弹性元素的橡皮筋。顶部钉有一个Crazyflie微型飞行器(https://www.bitcraze.io/products/crazyflie-2-1/),在跳跃过程中,Crazyflie可以增加定向推力以保持跳跃,Hopcopter通过伸缩腿实现敏捷性,而不需要复杂的触发机制。它的最大速度为2.38米/秒,跳跃高度为0.6至1.6米,为跳跃机器人设定了新的敏捷性基准。Hopcopter上没有太多空间放置额外的传感器,但添加了一些稳定翼,可以在没有任何位置反馈的情况下连续跳跃。
上腿由碳纤维棒制成,牢牢地固定在四轴飞行器下方,而下腿则有一个尖脚和3D打印的钩子,方便跳跃。同时,轴承将运动限制在垂直平移,确保稳定性。
预先拉伸并固定在上下腿之间的橡胶带,提供弹性后坐力。此外,反光标记有助于姿态测量。空中阶段的驱动允许连续跳跃,与锁定弹性驱动不同 —— 它甚至可以在半空中翻筋斗。
SONGNAN BAI, RUNZE DING, SONG LI, AND BINGXUAN PU
香港城市大学的研究人员表示,Hopcopter技术(即弹性腿)可以很容易地应用于大多数其他四旋翼飞机平台,因为Hopcopter的跳跃机制提供了节能的移动方式。与旋翼机和腿部机器人相比,它提高了任务持续时间和范围。它的被动腿设计可以无缝地集成到传统的旋翼飞行器中。它将使协同混合动力运动成为可能,比如通过一系列跳跃来运输重型有效载荷。Hopcopter代表了机器人技术的范式转变,展示了将飞行和跳跃能力集成在一起的好处,可以在各种场景中实现多功能和高效的移动。
研究人员于4月10日在《科学机器人》杂志上发表了他们的研究成果(https://www.science.org/doi/10.1126/scirobotics.adi8912)。

微信号|IEEE电气电子工程师学会
新浪微博|IEEE中国
· IEEE电气电子工程师学会 ·
往
期
推
荐
人工智能如何帮助抵御网络攻击
人工智能引领数据中心发展新趋势
汽车知晓你的信息?解读隐私与安全挑战
汽车成为信息时代的移动计算机:5大数据收集方式解析
