点击左上方蓝色“一口Linux”,选择“设为星标”
第一时间看干货文章 ☞【干货】嵌入式驱动工程师学习路线 ☞【干货】Linux嵌入式知识点-思维导图-免费获取 ☞【就业】一个可以写到简历的基于Linux物联网综合项目 ☞【就业】找工作简历模版 1
一口君后面会陆续更新基于瑞芯微rk3568的I2S系列文章。
预计10篇左右。有对语音感兴趣的朋友,可以收藏该专题。
《瑞芯微 | I2S-音频基础 -1》
《瑞芯微-I2S | 音频驱动调试基本命令和工具-基于rk3568-2》
针对音频设备,linux内核中包含了两类音频设备驱动框架;
OSS:开放声音系统
包含dsp和mixer字符设备接口,应用访问底层硬件是直接通过sound设备节点实现的;
ALSA:先进linux声音架构(Advanced Linux Sound Archiecture)
以card和组件(PCM、mixer等)为组件,应用是通过ALSA提供的alsa-lib库访问底层硬件的操作,不再访问sound设备节点了
ALSA由一系列的内核驱动、应用程序编程接口(API)以及支持linux下声音的应用程序组成、
ALSA项目发起的原因是linux下的声卡驱动(OSS)没有获得积极的维护,而且落后于新的声卡技术。
Jaroslav Kysela早先写了一个声卡驱动,并由此开始了ALSA项目,随后,更多的开发者加入到开发队伍中,更多的声卡获得支持,API的结构也获得了重组。目前已经成为了linux的主流音频体系结构。
ALSA的官网:
https://www.alsa-project.org/wiki/Main_Page
ALSA系统包括:
1、alsa-driver:alsa系统驱动。
2、alsa-lib:alsa库,用户空间调用,和内核空间交互。
3、alsa-utils:命令行工具。
4、alsa-plugin:alsa插件。
5、alsa-tools:alsa工具。
在应用层,ALSA 为我们提供了 alsa-lib,在 Linux 内核设备驱动层,ALSA 提供了 alsa-driver。
Linux 应用程序只需要调用 alsa-lib 提供的 API,即可完成对底层音频硬件的控制。
linux内核中alsa的软件结构如下:
用户空间的 alsa-lib 对应用程序提供统一的 API 接口,隐藏了驱动层的实际细节,简化了应用程序的实现难度
但是由于 alsa-lib 也由于过大,因此在 android 等下也经常使用 tiny-alsa。
如上图所示,在 Linux 内核中,有对 alsa-driver 进一步的封装,即 alsa-soc。
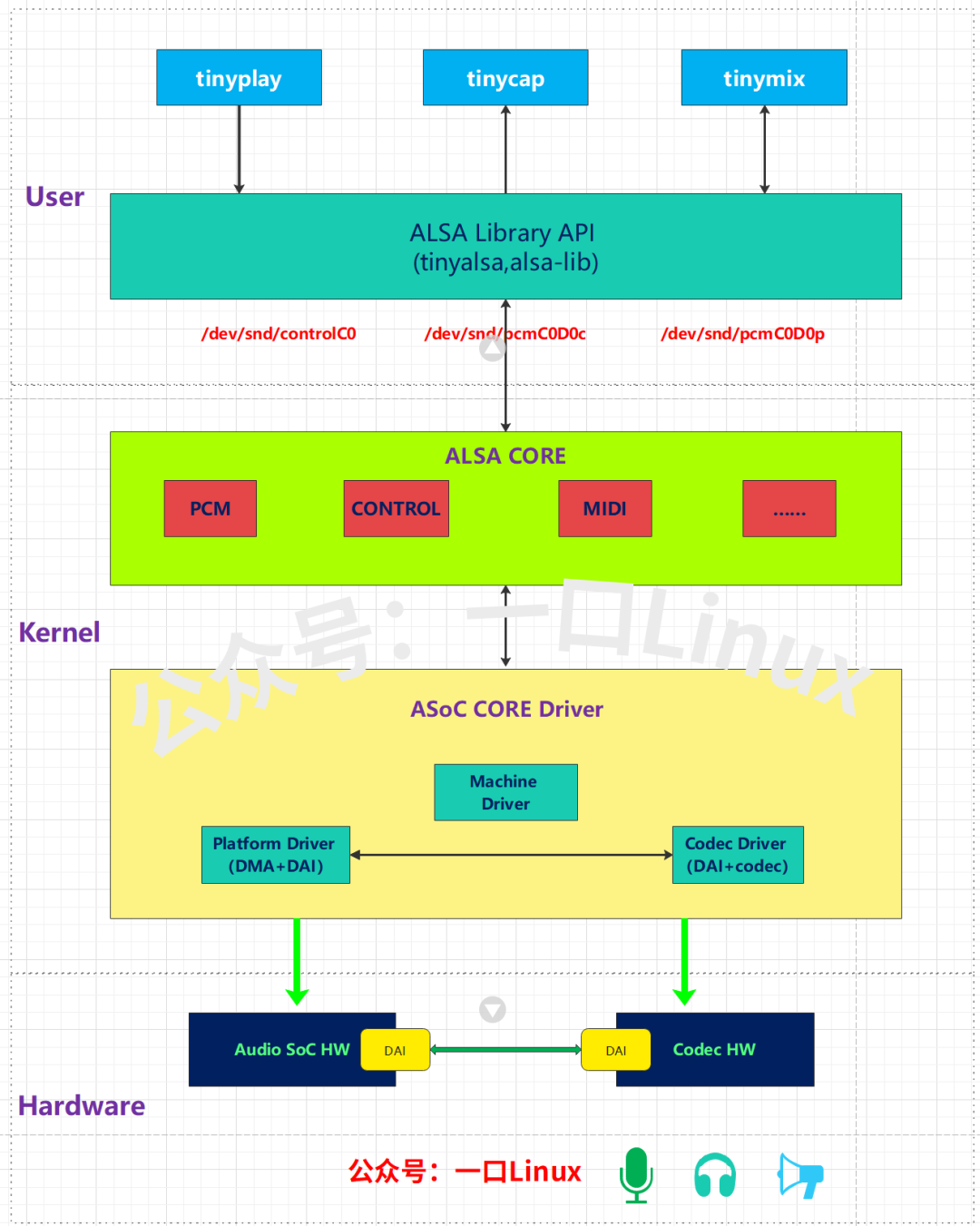
ALSA框架从上到下依次为应用程序、ALSA Library API、ALSA CORE、ASoC CORE、硬件驱动程序、硬件设备;
应用程序:
tinyplay/tinycap/tinymix,这些用户程序直接调用alsa用户库接口来实现放音、录音、控制;
ALSA Library API:
alsa用户库接口,对应用程序提供统一的API接口,这样可以隐藏了驱动层的实现细节,简化了应用程序的实现难度;常见有tinyalsa、alsa-lib;
ALSA CORE:
alsa核心层,向上提供逻辑设备(PCM/CTL/MIDI/TIMER/…)系统调用,向下驱动硬件设备(Machine/I2S/DMA/CODEC);
ASoC CORE:
建立在标准ALSA CORE基础上,为了更好支持嵌入式系统和应用于移动设备的音频Codec的一套软件体系,它将音频硬件设备驱动划分为Codec、Platform 和 Machine;
Hardware Driver:
音频硬件设备驱动,由三大部分组成,分别是 Machine、Platform、Codec;
Linux 系统下看到的设备文件结构如下:
rk3568_r:/ # cd /dev/snd/
rk3568_r:/dev/snd # ls -l
total 0
crw-rw---- 1 system audio 116, 4 2024-02-18 15:28 controlC0
crw-rw---- 1 system audio 116, 6 2024-02-18 15:28 controlC1
crw-rw---- 1 system audio 116, 3 2024-02-18 15:28 pcmC0D0c
crw-rw---- 1 system audio 116, 2 2024-02-18 15:28 pcmC0D0p
crw-rw---- 1 system audio 116, 5 2024-02-18 15:28 pcmC1D0p
crw-rw---- 1 system audio 116, 33 2024-02-18 15:28 timer
从上面能看到有如下设备文件:
controlC0 --> 用于声卡的控制,例如通道选择,混音,麦克控制,音量加减,开关等
controlC1
pcmC0D0c --> 用于录音的pcm设备
pcmC0D0p --> 用于播放的pcm设备
pcmC1D0p
timer --> 定时器
有的平台还有以下设备节点:
midiC0D0 --> 用于播放midi音频
seq --> 音序器
其中,C0、D0代表的是声卡0中的设备0
pcmC0D0c最后一个c代表capture
pcmC0D0p最后一个p代表playback
这些都是alsa-driver中的命名规则,从上面的列表可以看出,声卡下挂了6个设备
根据声卡的实际能力,驱动实际上可以挂载更多种类的设备,在include/sound/core.h 中,定义了以下设备类型,通常更关心的是 pcm 和 control 这两种设备,Default 一个声卡对应一个 Control 设备。
#define SNDRV_DEV_TOPLEVEL ((__force snd_device_type_t) 0)
#define SNDRV_DEV_CONTROL ((__force snd_device_type_t) 1)
#define SNDRV_DEV_LOWLEVEL_PRE ((__force snd_device_type_t) 2)
#define SNDRV_DEV_LOWLEVEL_NORMAL ((__force snd_device_type_t) 0x1000)
#define SNDRV_DEV_PCM ((__force snd_device_type_t) 0x1001)
#define SNDRV_DEV_RAWMIDI ((__force snd_device_type_t) 0x1002)
#define SNDRV_DEV_TIMER ((__force snd_device_type_t) 0x1003)
#define SNDRV_DEV_SEQUENCER ((__force snd_device_type_t) 0x1004)
#define SNDRV_DEV_HWDEP ((__force snd_device_type_t) 0x1005)
#define SNDRV_DEV_INFO ((__force snd_device_type_t) 0x1006)
#define SNDRV_DEV_BUS ((__force snd_device_type_t) 0x1007)
#define SNDRV_DEV_CODEC ((__force snd_device_type_t) 0x1008)
#define SNDRV_DEV_JACK ((__force snd_device_type_t) 0x1009)
#define SNDRV_DEV_COMPRESS ((__force snd_device_type_t) 0x100A)
#define SNDRV_DEV_LOWLEVEL ((__force snd_device_type_t) 0x2000)
在 Linux 源码中 ALSA 架构的代码在 /sound 下,Linux 5.0 的目录如下: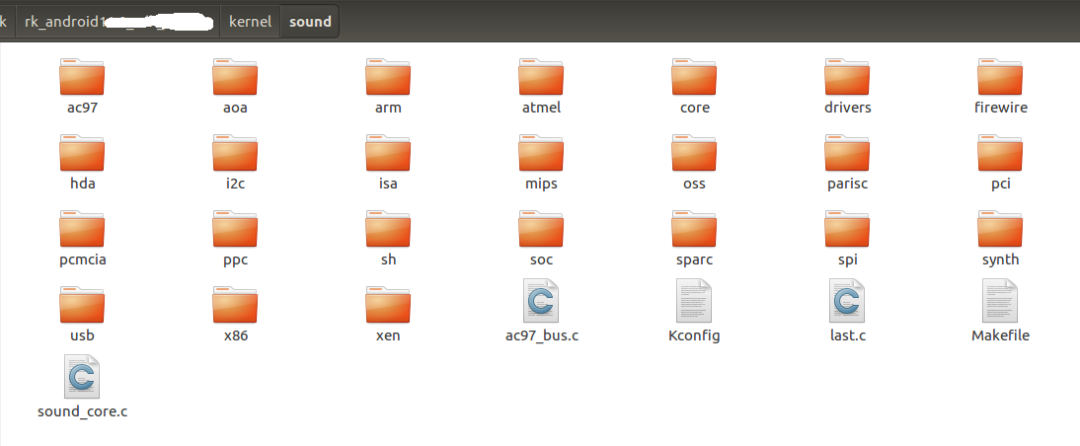
其中各主要子目录的作用如下:
core 该目录包含了ALSA 驱动的中间层,它是整个 ALSA 驱动的核心部分
core/oss 包含模拟旧的 OSS 架构的 PCM 和 Mixer 模块
core/seq 有关音序器相关的代码
drivers 放置一些与CPU、BUS架构无关的公用代码
i2c ALSA自己的I2C控制代码
pci pci声卡的顶层目录,子目录包含各种pci声卡的代码
isa isa声卡的顶层目录,子目录包含各种isa声卡的代码
soc 针对 system-on-chip 体系的中间层代码,即ASOC代码
soc/rockchip 瑞芯微平台i2s控制器驱动代码
soc/codecs 针对soc 体系的各种 codec 的代码,与平台无关
include ALSA驱动的公共头文件目录,其路径为 /include/sound,该目录的头文件需要导出给用户空间的应用程序使用,通常,驱动模块私有的头文件不应放置在这里
更多目录结构信息可以参考:
https://www.kernel.org/doc/html/latest/sound/kernel-api/writing-an-alsa-driver.html。
由于ASoC是建立在标准ALSA CORE上的一套软件体系,因此本篇博客重点介绍的都是ALSA CORE中的数据结构,并不涉及到ASoC CORE中的数据结构。
ALSA CORE中的数据结构大部分定义在include/sound/core.h、以及sound/core/目录下的文件中。
linux内核中使用struct snd_card表示ALSA音频驱动中的声卡设备
struct snd_card可以说是整个ALSA音频驱动最顶层的一个结构,整个声卡的软件逻辑结构开始于该结构,
几乎所有与声音相关的逻辑设备都是在snd_card的管理之下
声卡驱动的第一个动作通常就是创建一个snd_card结构体。
@include/sound/core.h
/* main structure for soundcard */
struct snd_card {
int number; /* number of soundcard (index to
snd_cards) */
char id[16]; /* id string of this card */
char driver[16]; /* driver name */
char shortname[32]; /* short name of this soundcard */
char longname[80]; /* name of this soundcard */
char irq_descr[32]; /* Interrupt description */
char mixername[80]; /* mixer name */
char components[128]; /* card components delimited with
space */
struct module *module; /* top-level module */
void *private_data; /* private data for soundcard */
void (*private_free) (struct snd_card *card); /* callback for freeing of
private data */
struct list_head devices; /* devices */
struct device ctl_dev; /* control device */
unsigned int last_numid; /* last used numeric ID */
struct rw_semaphore controls_rwsem; /* controls list lock */
rwlock_t ctl_files_rwlock; /* ctl_files list lock */
int controls_count; /* count of all controls */
int user_ctl_count; /* count of all user controls */
struct list_head controls; /* all controls for this card */
struct list_head ctl_files; /* active control files */
struct snd_info_entry *proc_root; /* root for soundcard specific files */
struct snd_info_entry *proc_id; /* the card id */
struct proc_dir_entry *proc_root_link; /* number link to real id */
struct list_head files_list; /* all files associated to this card */
struct snd_shutdown_f_ops *s_f_ops; /* file operations in the shutdown
state */
spinlock_t files_lock; /* lock the files for this card */
int shutdown; /* this card is going down */
struct completion *release_completion;
struct device *dev; /* device assigned to this card */
struct device card_dev; /* cardX object for sysfs */
const struct attribute_group *dev_groups[4]; /* assigned sysfs attr */
bool registered; /* card_dev is registered? */
wait_queue_head_t remove_sleep;
int offline; /* if this sound card is offline */
unsigned long offline_change;
wait_queue_head_t offline_poll_wait;
#ifdef CONFIG_PM
unsigned int power_state; /* power state */
wait_queue_head_t power_sleep;
#endif
#if IS_ENABLED(CONFIG_SND_MIXER_OSS)
struct snd_mixer_oss *mixer_oss;
int mixer_oss_change_count;
#endif
};
@include/sound/core.h
struct snd_card {
number: 声卡设备编号,通常从0开始,通过编号可以在snd_cards指针数组中找到对应的声卡设备;
id[16]:声卡设备的标识符;
driver:驱动名称;
shortname:设备简称,更多地用于打印信息;
longname:设备名称,会在具体驱动中设置,主要反映在/proc/asound/cards中;
irq_descr:中断描述信息;
mixername:混音器名称;
components:声卡组件名称,由空格分隔;
module:顶层模块;
private_data:声卡的私有数据;
private_free:释放私有数据的回调函数;
devices:保存该声卡下所有逻辑设备的链表;链表中存放的数据类型为struct snd_device;
ctl_dev:声卡Control设备内核设备结构体,其parent为card_dev,class为sound_class,主设备号为116;
last_numid:存储注册snd_control时为其分配的编号;
controls_rwsem:读写信号量,用于并发操作controls链表;
ctl_files_rwlock:读写自旋锁,用于并发操作ctl_files链表;
controls_count:controls链表的长度;
user_ctl_count:用户控制设备的数量;
controls:保存该声卡下所有控件(controls)的链表;该链表中存放的数据类型为struct snd_kcontrol;
ctl_files:用于管理该card下的active的control设备;链表中存放的数据类型为struct snd_ctl_file;
proc_root:声卡设备在proc文件系统的根目录;即/proc/asound/card%d目录;
proc_root_link:指向/proc/asound/card%d的链接文件,文件名为id;
files_list:保存此声卡相关的所有文件的链表;链表中存放的数据类型为struct snd_monitor_file;
s_f_ops:关机状态下的文件操作;
files_lock:自旋锁;
shutdown:此声卡正在关闭;
release_completion:释放完成;
dev:分配给此声卡的设备,一般为平台设备的device;
card_dev:声卡设备的内核设备结构体,card用于在sys中显示,用于代表该card;把snd_card看做是device的子类,其parent为dev,class为sound_class,未设置设备号devt(默认就是0);
dev_groups:分配的sysfs属性组;
registered:声卡设备card_dev是否已注册;
remove_sleep:等待队列头;
power_state:电源状态;
power_sleep:电源等待队列头;
};
每一个声卡设备的创建都是通过snd_card_new函数实现的,声卡设备被注册后都会被添加到全局snd_cards指针数组中;
@include/sound/core.h
int snd_card_new(struct device *parent, int idx, const char *xid,
struct module *module, int extra_size,
struct snd_card **card_ret);
@sound/core/init.c
static struct snd_card *snd_cards[SNDRV_CARDS];
声卡设备一般包含许多功能模块,比如PCM(录音和播放)、Control(声卡控制),因此ALSA将声卡的功能模块又抽象为一个逻辑设备,与之对应的数据结构就是struct snd_device;
@sound/core/device.c
struct snd_device {
struct list_head list; /* list of registered devices */
struct snd_card *card; /* card which holds this device */
enum snd_device_state state; /* state of the device */
enum snd_device_type type; /* device type */
void *device_data; /* device structure */
struct snd_device_ops *ops; /* operations */
};
list:用于构建双向链表节点,该节点会添加到声卡设备snd_card的devices链表中;
snd_card:表示当前声卡逻辑设备所属的声卡设备;
state:表示当前声卡逻辑设备的状态;
type:表示当前声卡逻辑设备的类型,比如pcm、control设备;
device_data:一般用于存放具体的功能模块逻辑设备的结构,比如对于pcm逻辑设备存放的就是snd_pcm实例;
ops:声卡逻辑设备的操作集;
每一个声卡逻辑设备的创建最终会调用snd_device_new来生成一个snd_device实例,并把该实例链接到snd_card的devices链表中。
通常,linux内核已经提供了一些常用的功能模块逻辑设备的创建函数,而不必直接调用snd_device_new,比如:snd_pcm_new、snd_ctl_create。
需要注意的是:声卡逻辑设备注册后会在**/dev/snd**目录下生成对应的字符设备文件。
linux中使用snd_device_ops来表示声卡逻辑设备的操作集;
@include/sound/core.h
struct snd_device_ops {
int (*dev_free)(struct snd_device *dev);
int (*dev_register)(struct snd_device *dev);
int (*dev_disconnect)(struct snd_device *dev);
};
其中:
linux内核使用snd_device_state表示声卡逻辑设备的状态
@include/sound/core.h
enum snd_device_state {
SNDRV_DEV_BUILD, // 构建中
SNDRV_DEV_REGISTERED, // 已经准备并准备就绪
SNDRV_DEV_DISCONNECTED, // 已断开连接
};
linux内核使用snd_device_state表示声卡逻辑设备的类型
@include/sound/core.h
enum snd_device_type {
SNDRV_DEV_LOWLEVEL,
SNDRV_DEV_INFO,
SNDRV_DEV_BUS,
SNDRV_DEV_CODEC,
SNDRV_DEV_PCM,
SNDRV_DEV_COMPRESS,
SNDRV_DEV_RAWMIDI,
SNDRV_DEV_TIMER,
SNDRV_DEV_SEQUENCER,
SNDRV_DEV_HWDEP,
SNDRV_DEV_JACK,
SNDRV_DEV_CONTROL, /* NOTE: this must be the last one */
};
其中:
SNDRV_DEV_LOWLEVEL:低级别硬件访问接口;
SNDRV_DEV_INFO:信息查询接口;
SNDRV_DEV_BUS:总线接口,如USB、PCI等;
SNDRV_DEV_CODEC:编解码器设备;
SNDRV_DEV_PCM:PCM 设备,包括输入输出设备以及混音器等;
SNDRV_DEV_COMPRESS:压缩和解压缩设备;
SNDRV_DEV_RAWMIDI:原始MIDI设备;
SNDRV_DEV_TIMER:定时器设备;
SNDRV_DEV_SEQUENCER:序列器设备;
SNDRV_DEV_HWDEP:硬件依赖设备;
SNDRV_DEV_JACK:JACK音频连接设备;
SNDRV_DEV_CONTROL:control设备,此项必须放在最后;
linux内核使用snd_minor表示声卡逻辑设备上下文信息,它在调用snd_register_device函数注册声卡逻辑设备时被初始化,在声卡逻辑设备被使用时就可以从该结构体中得到相应的信息。
struct snd_minor {
int type; /* SNDRV_DEVICE_TYPE_XXX */
int card; /* card number */
int device; /* device number */
const struct file_operations *f_ops; /* file operations */
void *private_data; /* private data for f_ops->open */
struct device *dev; /* device for sysfs */
struct snd_card *card_ptr; /* assigned card instance */
};
其中:
每一个snd_minor的创建都是通过snd_register_device函数实现的,并被添加到全局snd_minors指针数组中;
static struct snd_minor *snd_minors[SNDRV_OS_MINORS];
为了更加形象的表示struct snd_card、struct snd_device、struct snd_minor 之间的关系,我们绘制了如下关系框图: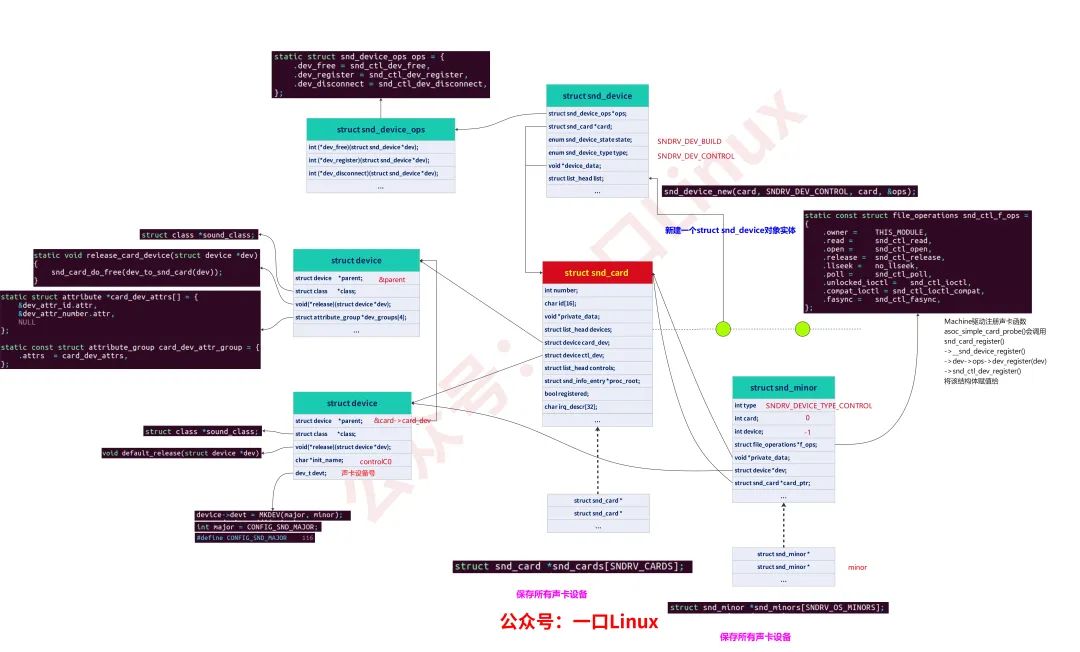
Linux 内核 ALSA 音频框架的其它部分需要创建音频设备文件时,调用 snd_register_device() 函数为声卡注册 ALSA 设备文件,该函数定义 (位于 sound/core/sound.c)
/**
* snd_register_device - Register the ALSA device file for the card
* @type: the device type, SNDRV_DEVICE_TYPE_XXX
* @card: the card instance
* @dev: the device index
* @f_ops: the file operations
* @private_data: user pointer for f_ops->open()
* @device: the device to register
*
* Registers an ALSA device file for the given card.
* The operators have to be set in reg parameter.
*
* Return: Zero if successful, or a negative error code on failure.
*/
int snd_register_device(int type, struct snd_card *card, int dev,
const struct file_operations *f_ops,
void *private_data, struct device *device)
int minor;
int err = 0;
struct snd_minor *preg;
if (snd_BUG_ON(!device))
return -EINVAL;
preg = kmalloc(sizeof *preg, GFP_KERNEL);
if (preg == NULL)
return -ENOMEM;
preg->type = type;
preg->card = card ? card->number : -1;
preg->device = dev;
preg->f_ops = f_ops;
preg->private_data = private_data;
preg->card_ptr = card;
mutex_lock(&sound_mutex);
minor = snd_find_free_minor(type, card, dev);
if (minor < 0) {
err = minor;
goto error;
}
preg->dev = device;
device->devt = MKDEV(major, minor);
err = device_add(device);
if (err < 0)
goto error;
snd_minors[minor] = preg;
error:
mutex_unlock(&sound_mutex);
if (err < 0)
kfree(preg);
return err;
}
EXPORT_SYMBOL(snd_register_device);
参数说明如下
type: 设备类型
card: 声卡实例
dev: 设备索引
f_ops: 文件操作。用户空间程序对设备文件的各种操作,都将由这里传入的文件操作执行。
private_data:f_ops->open() 要用到的用户指针
device:要注册的设备
snd_register_device() 函数的执行过程如下:
snd_register_device() 函数调用 device_add() 函数向设备层次体系结构添加设备,这个函数定义 (位于 drivers/base/core.c) 如下:
int device_add(struct device *dev)
{
struct device *parent;
struct kobject *kobj;
struct class_interface *class_intf;
int error = -EINVAL;
struct kobject *glue_dir = NULL;
dev = get_device(dev);
if (!dev)
goto done;
if (!dev->p) {
error = device_private_init(dev);
if (error)
goto done;
}
/*
* for statically allocated devices, which should all be converted
* some day, we need to initialize the name. We prevent reading back
* the name, and force the use of dev_name()
*/
if (dev->init_name) {
dev_set_name(dev, "%s", dev->init_name);
dev->init_name = NULL;
}
/* subsystems can specify simple device enumeration */
if (!dev_name(dev) && dev->bus && dev->bus->dev_name)
dev_set_name(dev, "%s%u", dev->bus->dev_name, dev->id);
if (!dev_name(dev)) {
error = -EINVAL;
goto name_error;
}
pr_debug("device: '%s': %s\n", dev_name(dev), __func__);
parent = get_device(dev->parent);
kobj = get_device_parent(dev, parent);
if (IS_ERR(kobj)) {
error = PTR_ERR(kobj);
goto parent_error;
}
if (kobj)
dev->kobj.parent = kobj;
/* use parent numa_node */
if (parent && (dev_to_node(dev) == NUMA_NO_NODE))
set_dev_node(dev, dev_to_node(parent));
/* first, register with generic layer. */
/* we require the name to be set before, and pass NULL */
error = kobject_add(&dev->kobj, dev->kobj.parent, NULL);
if (error) {
glue_dir = get_glue_dir(dev);
goto Error;
}
/* notify platform of device entry */
error = device_platform_notify(dev, KOBJ_ADD);
if (error)
goto platform_error;
error = device_create_file(dev, &dev_attr_uevent);
if (error)
goto attrError;
error = device_add_class_symlinks(dev);
if (error)
goto SymlinkError;
error = device_add_attrs(dev);
if (error)
goto AttrsError;
error = bus_add_device(dev);
if (error)
goto BusError;
error = dpm_sysfs_add(dev);
if (error)
goto DPMError;
device_pm_add(dev);
if (MAJOR(dev->devt)) {
error = device_create_file(dev, &dev_attr_dev);
if (error)
goto DevAttrError;
error = device_create_sys_dev_entry(dev);
if (error)
goto SysEntryError;
devtmpfs_create_node(dev);
}
/* Notify clients of device addition. This call must come
* after dpm_sysfs_add() and before kobject_uevent().
*/
if (dev->bus)
blocking_notifier_call_chain(&dev->bus->p->bus_notifier,
BUS_NOTIFY_ADD_DEVICE, dev);
kobject_uevent(&dev->kobj, KOBJ_ADD);
/*
* Check if any of the other devices (consumers) have been waiting for
* this device (supplier) to be added so that they can create a device
* link to it.
*
* This needs to happen after device_pm_add() because device_link_add()
* requires the supplier be registered before it's called.
*
* But this also needs to happen before bus_probe_device() to make sure
* waiting consumers can link to it before the driver is bound to the
* device and the driver sync_state callback is called for this device.
*/
if (dev->fwnode && !dev->fwnode->dev) {
dev->fwnode->dev = dev;
fw_devlink_link_device(dev);
}
bus_probe_device(dev);
if (parent)
klist_add_tail(&dev->p->knode_parent,
&parent->p->klist_children);
if (dev->class) {
mutex_lock(&dev->class->p->mutex);
/* tie the class to the device */
klist_add_tail(&dev->p->knode_class,
&dev->class->p->klist_devices);
/* notify any interfaces that the device is here */
list_for_each_entry(class_intf,
&dev->class->p->interfaces, node)
if (class_intf->add_dev)
class_intf->add_dev(dev, class_intf);
mutex_unlock(&dev->class->p->mutex);
}
done:
put_device(dev);
return error;
SysEntryError:
if (MAJOR(dev->devt))
device_remove_file(dev, &dev_attr_dev);
DevAttrError:
device_pm_remove(dev);
dpm_sysfs_remove(dev);
DPMError:
bus_remove_device(dev);
BusError:
device_remove_attrs(dev);
AttrsError:
device_remove_class_symlinks(dev);
SymlinkError:
device_remove_file(dev, &dev_attr_uevent);
attrError:
device_platform_notify(dev, KOBJ_REMOVE);
platform_error:
kobject_uevent(&dev->kobj, KOBJ_REMOVE);
glue_dir = get_glue_dir(dev);
kobject_del(&dev->kobj);
Error:
cleanup_glue_dir(dev, glue_dir);
parent_error:
put_device(parent);
name_error:
kfree(dev->p);
dev->p = NULL;
goto done;
}
EXPORT_SYMBOL_GPL(device_add);
device_add() 函数调用 device_create_file() 和 devtmpfs_create_node() 等函数在 sysfs 和 devtmpfs 文件系统中创建文件。
内核各模块通过 devtmpfs_create_node() 函数创建 devtmpfs 文件,这个函数定义 (位于 drivers/base/devtmpfs.c) 如下:
static int devtmpfs_submit_req(struct req *req, const char *tmp)
{
init_completion(&req->done);
spin_lock(&req_lock);
req->next = requests;
requests = req;
spin_unlock(&req_lock);
wake_up_process(thread);
wait_for_completion(&req->done);
kfree(tmp);
return req->err;
}
int devtmpfs_create_node(struct device *dev)
{
const char *tmp = NULL;
struct req req;
if (!thread)
return 0;
req.mode = 0;
req.uid = GLOBAL_ROOT_UID;
req.gid = GLOBAL_ROOT_GID;
req.name = device_get_devnode(dev, &req.mode, &req.uid, &req.gid, &tmp);
if (!req.name)
return -ENOMEM;
if (req.mode == 0)
req.mode = 0600;
if (is_blockdev(dev))
req.mode |= S_IFBLK;
else
req.mode |= S_IFCHR;
req.dev = dev;
return devtmpfs_submit_req(&req, tmp);
}
这个函数通过 device_get_devnode() 函数获得 devtmpfs 设备文件的文件名,创建一个 devtmpfs 设备文件创建请求,并提交。在 devtmpfs_submit_req() 函数中,可以看到所有的请求由单链表维护,新的请求被放在单链表的头部。
device_get_devnode() 函数定义 (位于 drivers/base/core.c) 如下:
const char *device_get_devnode(struct device *dev,
umode_t *mode, kuid_t *uid, kgid_t *gid,
const char **tmp)
{
char *s;
*tmp = NULL;
/* the device type may provide a specific name */
if (dev->type && dev->type->devnode)
*tmp = dev->type->devnode(dev, mode, uid, gid);
if (*tmp)
return *tmp;
/* the class may provide a specific name */
if (dev->class && dev->class->devnode)
*tmp = dev->class->devnode(dev, mode);
if (*tmp)
return *tmp;
/* return name without allocation, tmp == NULL */
if (strchr(dev_name(dev), '!') == NULL)
return dev_name(dev);
/* replace '!' in the name with '/' */
s = kstrdup(dev_name(dev), GFP_KERNEL);
if (!s)
return NULL;
strreplace(s, '!', '/');
return *tmp = s;
}
device_get_devnode() 函数按照一定的优先级,尝试从几个地方获得设备文件名:
static char *sound_devnode(struct device *dev, umode_t *mode)
{
if (MAJOR(dev->devt) == SOUND_MAJOR)
return NULL;
return kasprintf(GFP_KERNEL, "snd/%s", dev_name(dev));
}
注销 ALSA 设备文件 当不再需要某个 ALSA 设备文件时,可以注销它,这通过 snd_unregister_device() 函数完成。snd_unregister_device() 函数定义 (位于 sound/core/sound.c)
int snd_unregister_device(struct device *dev)
{
int minor;
struct snd_minor *preg;
mutex_lock(&sound_mutex);
for (minor = 0; minor < ARRAY_SIZE(snd_minors); ++minor) {
preg = snd_minors[minor];
if (preg && preg->dev == dev) {
snd_minors[minor] = NULL;
device_del(dev);
kfree(preg);
break;
}
}
mutex_unlock(&sound_mutex);
if (minor >= ARRAY_SIZE(snd_minors))
return -ENOENT;
return 0;
}
EXPORT_SYMBOL(snd_unregister_device);
这个函数根据传入的设备,查找对应的 struct snd_minor 对象,找到时,则从系统中删除设备,这包括删除 devtmpfs 文件系统中的设备文件等,并释放 struct snd_minor 对象。
在 snd_register_device() 函数中可以看到,是给设备计算了设备号的,这里不能获取设备号,并根据设备号在 struct snd_minor 对象指针数组中快速查找么?
音频设备文件的文件操作 注册音频字符设备时,绑定的文件操作是 snd_fops,这个文件操作只定义了 open 和 llseek 两个操作,其中 llseek 操作 noop_llseek 的定义 (位于 fs/read_write.c) 如下:
loff_t noop_llseek(struct file *file, loff_t offset, int whence)
{
return file->f_pos;
}
EXPORT_SYMBOL(noop_llseek);
这个操作基本上什么也没做。
open 操作 snd_open 的定义 (位于 sound/core/sound.c) 如下:
static int snd_open(struct inode *inode, struct file *file)
{
unsigned int minor = iminor(inode);
struct snd_minor *mptr = NULL;
const struct file_operations *new_fops;
int err = 0;
if (minor >= ARRAY_SIZE(snd_minors))
return -ENODEV;
mutex_lock(&sound_mutex);
mptr = snd_minors[minor];
if (mptr == NULL) {
mptr = autoload_device(minor);
if (!mptr) {
mutex_unlock(&sound_mutex);
return -ENODEV;
}
}
new_fops = fops_get(mptr->f_ops);
mutex_unlock(&sound_mutex);
if (!new_fops)
return -ENODEV;
replace_fops(file, new_fops);
if (file->f_op->open)
err = file->f_op->open(inode, file);
return err;
}
这个函数:
具体详细的函数,后面驱动分析章节会继续分析讨论。
end
一口Linux
关注,回复【1024】海量Linux资料赠送
精彩文章合集
文章推荐