 视频演示
视频演示 AWTK介绍
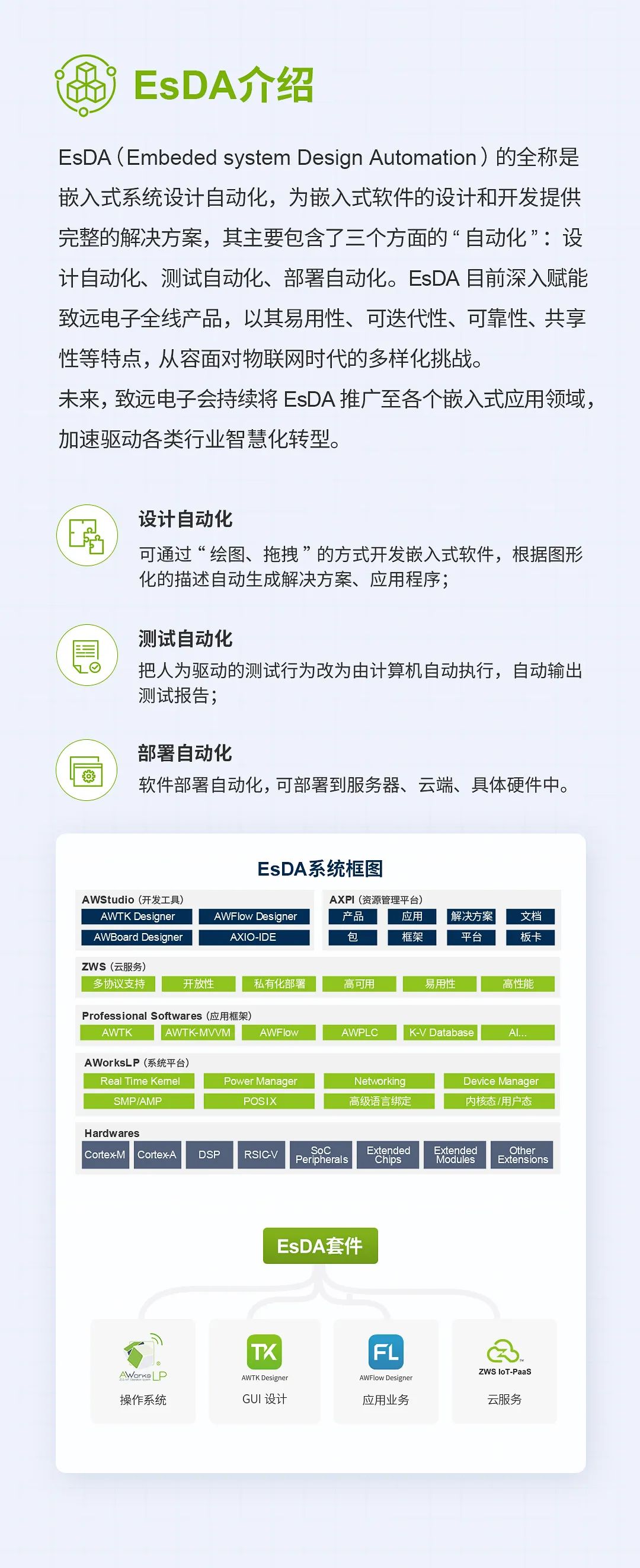
AWTK介绍
插针机系统介绍本次使用 ZTP800 作为插针机的HMI设备,中间使用Modbus协议与PLC通信。ZTP800中内置的AWTK-HMI运行时引擎,让用户无需额外编写C代码即可实现插针机的人机交互界面。

图2 插针机系统介绍
注:AWTK-HMI是开源的HMI运行时引擎,如想了解编译方法请参考AWTK-HMI仓库的说明文档,在ZTP800的部署AWTK可以参考ZTP800在线文档的AWTK移植章节。
插针机HMI开发流程只需要3步:
在PC配置好Modbus的通信点表文件;
使用AWStudio软件通过简单拖拽做界面设计;
最后把工程下载到ZTP800运行。

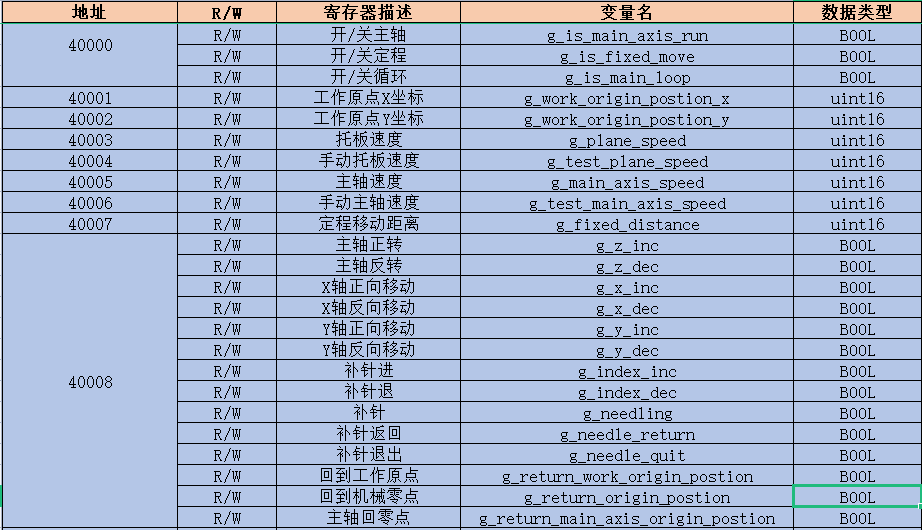
AWTK-HMI要使用Modbus通信功能,需要用户创建一个配置文件modbus_model.json。
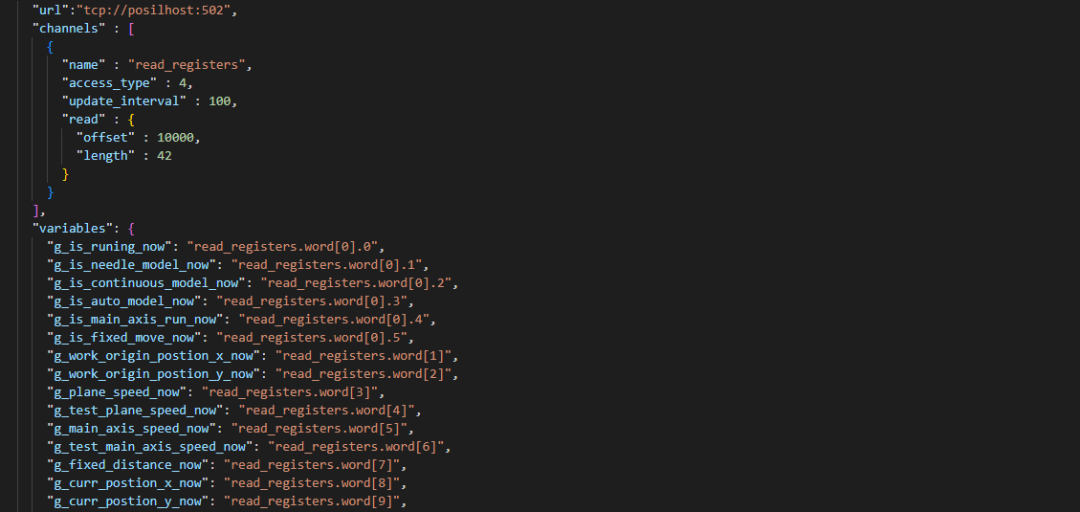
图5 modbus_model.json配置文件
在AWStudio创建一个新AWTK工程,如下图:

图6 插针机首页开发界面
把需要显示的控件从工具栏拖放到页面上:

图7 插针机操作界面

图8 变量绑定规则界面
例如要让Label控件显示补针状态,可以给这个Label控件添加自定义属性【v-data:text】,属性值设置为【g_is_needle_model?”补针状态”:”非补针状态”】,代表控件的text属性会跟随g_is_needle_model变量变化。如下图:


Modbus模块会自动同步g_is_needle_model、g_plane_speed等变量,并周期读写从机,因此上面控件显示就会周期性的更新,或周期性的把输入值写入从机。
用户甚至可以把变量值立即写入从机,在控件的事件响应脚本中增加代码【exec('update', 'write_registers')】即可,其中write_registers就是modbus_model.json定义的通道名。
4. AWTK-HMI工程下载运行
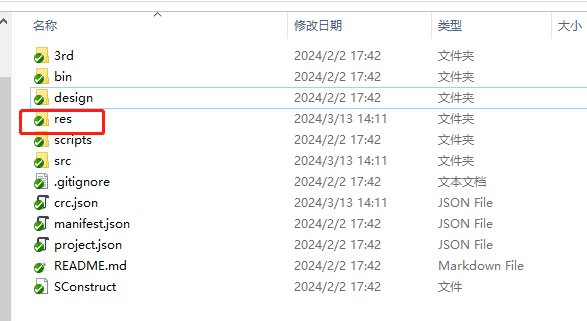
上面的工程开发完成后,点击AWStudio上的打包按钮,在工程目录下会生成出一个res文件夹,如下图所示。把res文件夹的内容下载到ZTP800的AWTK-HMI运行时程序的对应位置,重启设备就可以顺利启动我们新开发的HMI界面。

EtherCAT 系列文章
【新品上市】ZMC900E 国产高性能EtherCAT总线控制器
【新品上市】ZLG致远电子PCIe EtherCAT通讯卡产品正式发布!
【技术分享】EtherCAT 数据帧格式和寻址方式简介
【技术分享】“脱胎换骨”--插针机运动控制
【技术分享】EtherCAT总线如何对从站固件进行升级?
【技术分享】EtherCAT冗余技术如何实现通信线缆断开的补救?
【技术分享】如何精准分析人形机器人运动数据?
【技术分享】为何EtherCAT在运动控制总线中如此受欢迎?
【产品应用】EtherCAT主站控制器系统实时性测试
【产品应用】ZMC900E 国产EtherCAT主站控制器 — 电源口传导骚扰整改
【产品应用】ZMC300E EtherCAT主站控制器实现复杂的运动轨迹规划原理及应用
【产品应用】手把手带你使用ZMC300E绘图
【产品应用】三个步骤,让你的EtherCAT电机转起来
【产品应用】EtherCAT如何保障高效率、高实时性、高灵活性的现场总线通讯
【产品介绍】ZMC601E总线型边缘控制器 — 引领制造型企业数字化转型
【产品介绍】ZMC600E EtherCAT主站控制器全新上市
【产品介绍】ZLG推出新一代工业机器人解决方案,为工业机器人注入新的活力
更多往期文章,请点击“ 阅读原文 ”。