

前面我们实现了异步传输的demo,能够进行数据收发测试。但是还不够,现在的实现不方便应用层使用。对于应用层来说只需要启动,关闭,读,写这几个接口,无需关心USB相关的逻辑。使用FIFO来实现应用层和底层驱动的解耦是一个不错的方式,我们前面也有系列文章分享了FIFO的实现见:https://mp.weixin.qq.com/s/MvL9eDesyuxD60fnbl1nag
这一篇我们就在上一篇基础上增加FIFO,实现底层和应用的解耦,最后将我们之前设计的GUI和现在的框架合并起来,实现更加高效好用的最终版本。
我们在上一篇框图基础上修改
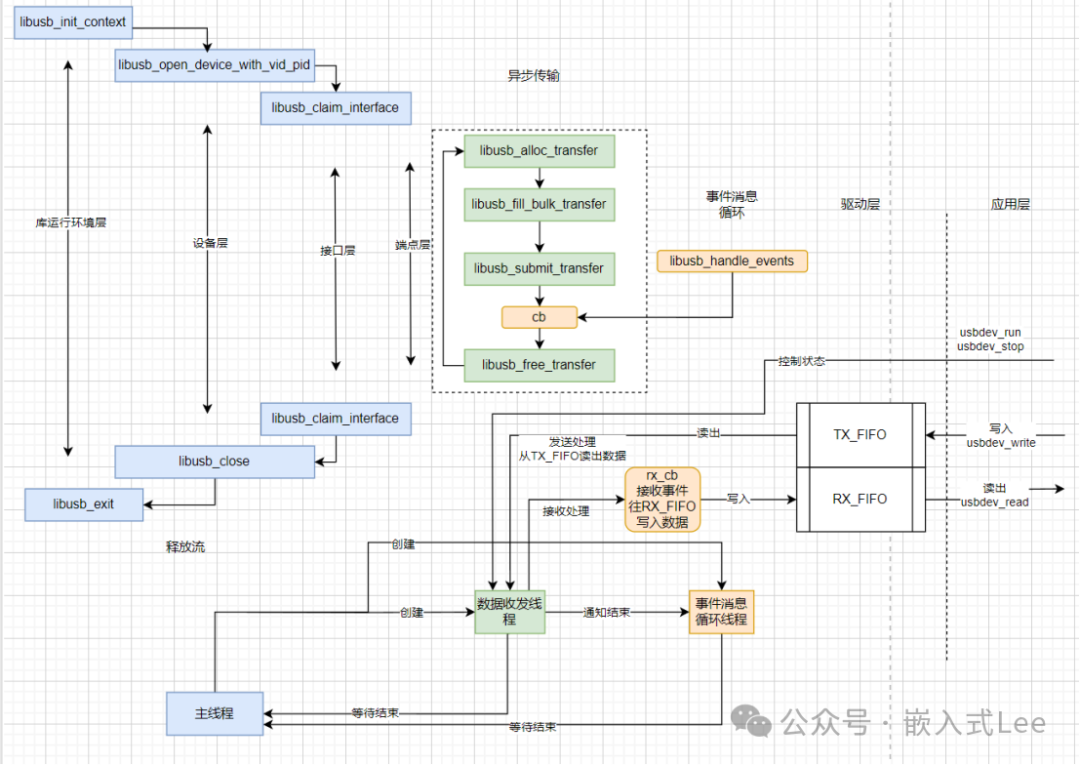
提供给应用层仅4个接口
usbdev_run
usbdev_stop 控制设备启动和停止,即控制数据收发线程的状态,现在收发线程默认启动就按照默认参数打开设备接口,进行端点的收发,通过这两个接口控制数据收发的启动和停止。今后还可以继续优化,数据收发线程维护一个状态机,划分为更多更细的状态,可以进行更多更细致的控制,比如打开某个接口,控制某个端点的收发,端点收发的启动停止,传输次数等。
而应用层往USB发送数据只要调用usbdev_write接口往TX_FIFO写数据即可,数据收发线程自动根据当前状态从TX_FIFO读出数据进行发送。
接收和上述相反,数据收发线程根据状态进行USB接收,接收到数据后在事件回调中将数据写入RX_FIFO中,应用层只需要调用usbdev_read读RX_FIFO即可。
以上就实现了应用层和底层的接口,接口很简单,应用非常方便。
新增usbdev_fifo.c/usbdev_fifo.h实现以上tx和rx的fifo实例。
而fifo.c/fifo.h是完全可移植的fifo实现代码,参考之前的文章。
usbd_cfg.h定义一些参数
extern "C" {}
usbdev.c
static void* usb_event_thread(void *arg); /* USB事件线程处理函数 */static void* usb_handle_thread(void *arg); /* USB业务线程处理函数 */pthread_t s_usb_event_thread; /* USB事件处理线程句柄 */pthread_t s_usb_handle_thread; /* USB业务处理线程句柄 */libusb_device_handle *s_opened_handle = NULL; /* USB打开的设备句柄 */struct libusb_transfer* s_tx_transfer = NULL; /* 发送传输 */struct libusb_transfer* s_rx_transfer = NULL; /* 接收传输 */static uint8_t s_tx_buffer[TRANSFER_SIZE]; /* 发送数据 */static uint8_t s_rx_buffer[TRANSFER_SIZE]; /* 接收数据 */static int s_tx_busy = 0; /* 发送忙标志 */static int s_rx_busy = 0; /* 接收忙标志 */sem_t s_sem;int16_t vid = VID;int16_t pid = PID;int16_t itf = USB_ITF_ID;int16_t in_ep = USB_IN_EP;int16_t out_ep = USB_OUT_EP;static usbdev_state_e s_usbdev_state = USBDEV_STATE_INITING;int usbdev_run(void){int r;s_usbdev_state = USBDEV_STATE_INITING;usbdev_fifo_init();r = libusb_init_context(/*ctx=*/NULL, /*options=*/NULL, /*num_options=*/0);if (r < 0){//printf("failed to init context %d\r\n",r);usbdev_fifo_deinit();s_usbdev_state = USBDEV_STATE_STOPED;return r;}s_opened_handle = libusb_open_device_with_vid_pid(NULL, vid, pid);if (s_opened_handle == NULL){//printf("open dev err\r\n");libusb_exit(NULL);usbdev_fifo_deinit();s_usbdev_state = USBDEV_STATE_STOPED;return r;}r = libusb_claim_interface(s_opened_handle,itf);if (r < 0){//printf("failed to claim interface %d\r\n",r);libusb_close(s_opened_handle);libusb_exit(NULL);usbdev_fifo_deinit();s_usbdev_state = USBDEV_STATE_STOPED;return r;}sem_init(&s_sem, 0, 0);/* 创建usb事件处理线程 */r = pthread_create(&s_usb_event_thread,0,usb_event_thread,0);if (r != 0){//printf("failed to create usb event thread:%d\r\n",r);libusb_release_interface(s_opened_handle,itf);libusb_close(s_opened_handle);libusb_exit(NULL);usbdev_fifo_deinit();s_usbdev_state = USBDEV_STATE_STOPED;return r;}/* 创建usb业务处理线程 */r = pthread_create(&s_usb_handle_thread,0,usb_handle_thread,0);if (r != 0){//printf("failed to create usb handle thread:%d\r\n",r);libusb_release_interface(s_opened_handle,itf);libusb_close(s_opened_handle);libusb_exit(NULL);usbdev_fifo_deinit();s_usbdev_state = USBDEV_STATE_STOPED;return r;}s_usbdev_state = USBDEV_STATE_RUNING;/* 等待线程结束 */void *res;pthread_join(s_usb_event_thread,&res);pthread_join(s_usb_handle_thread,&res);sem_destroy(&s_sem);libusb_release_interface(s_opened_handle,USB_ITF_ID);libusb_close(s_opened_handle);libusb_exit(NULL);usbdev_fifo_deinit();s_usbdev_state = USBDEV_STATE_STOPED;return 0;}void tx_cb(struct libusb_transfer *transfer){if (transfer->status == LIBUSB_TRANSFER_COMPLETED){/* 成功 *///printf("tx_cb ok\r\n");}else{/* 失败 *///printf("tx_cb err %d\r\n",transfer->status);//libusb_submit_transfer(transfer);}libusb_free_transfer(transfer);s_tx_busy = 0;}void rx_cb(struct libusb_transfer *transfer){if (transfer->status == LIBUSB_TRANSFER_COMPLETED){/* 成功 *///printf("rx_cb ok\r\n");}else{/* 失败 *///printf("rx_cb err %d\r\n",transfer->status);//libusb_submit_transfer(transfer);}if(transfer->actual_length > 0){//printf("rx len %d\r\n",transfer->actual_length);usbdev_rx_fifo_put(0, s_rx_buffer, transfer->actual_length);}libusb_free_transfer(transfer);s_rx_busy = 0;}static void* usb_event_thread(void *arg){while(1){if(0 == sem_trywait(&s_sem)){return 0;}libusb_handle_events(0);const struct timespec interval={.tv_nsec = 1000000,.tv_sec = 0,};pthread_delay_np(&interval);}return 0;}static void* usb_handle_thread(void *arg){while(1){int rc;/* 发送处理 */uint32_t len;if(s_tx_busy == 0){len = usbdev_tx_fifo_get(0, s_tx_buffer, sizeof(s_tx_buffer));if(len > 0){s_tx_busy = 1;s_tx_transfer = libusb_alloc_transfer(0);libusb_fill_bulk_transfer(s_tx_transfer,s_opened_handle,out_ep,s_tx_buffer,len,&tx_cb,0,100);rc = libusb_submit_transfer(s_tx_transfer);if(rc < 0){s_tx_busy = 0;libusb_free_transfer(s_tx_transfer);s_tx_transfer = 0;}}}/* 接收处理 */if(s_rx_busy == 0){s_rx_busy = 1;s_rx_transfer = libusb_alloc_transfer(0);libusb_fill_bulk_transfer(s_rx_transfer,s_opened_handle,in_ep,s_rx_buffer,sizeof(s_rx_buffer),&rx_cb,0,100);rc = libusb_submit_transfer(s_rx_transfer);if(rc < 0){s_rx_busy = 0;libusb_free_transfer(s_rx_transfer);s_rx_transfer = 0;}}const struct timespec interval={.tv_nsec = 1000000,.tv_sec = 0,};pthread_delay_np(&interval);}return 0;}int usbdev_stop(void){sem_post(&s_sem);}int usbdev_write(int id, uint8_t* buffer, uint32_t len){return usbdev_tx_fifo_put(id, buffer, len);}int usbdev_read(int id, uint8_t* buffer, uint32_t len){return usbdev_rx_fifo_get(id, buffer, len);}usbdev_state_e usbdev_state(void){return s_usbdev_state;}
ubsdev.h
extern "C" {typedef enum{USBDEV_STATE_INITING = 0,USBDEV_STATE_RUNING = 1,USBDEV_STATE_STOPED = 2,} usbdev_state_e;int usbdev_run(void);int usbdev_write(int id, uint8_t* buffer, uint32_t len);int usbdev_read(int id, uint8_t* buffer, uint32_t len);int usbdev_stop(void);usbdev_state_e usbdev_state(void);}
fifo.c
#include#include "fifo.h"/*** in为写入索引 0~(buffer_len-1)。* out为读出索引 0~(buffer_len-1)。* in == out时可能是满,也可能是空,可以通过len有效数据长度来确认。* 写数据in增加,直到追赶到out则满。* 读数据则out增加,直到追赶到in则空。* in大于out时则[out,in)区间是有效数据。* in小于out时则[out,buffer_len)和[0,in)区间是有效数据。************************************************************ 0 buffer_len-1 buffer_len* (1)开始 in和out都是0* | |* in(0)* out(0)* len = 0* (2)写入n字节数据 in变为n和out还是0 对应in大于out的情况* | |* out(0)————————————>in(n) |* len = n* (3)读出m字节数据(m* | |* out(m)————>in(n)* len = n-m* (4)继续写入数据,绕回到开头,对应in小于out的情况* | |* out(m)————————————————————————————————>* ——>in(k)* len = k + buffer_len-m*/uint32_t fifo_in(fifo_st* dev, uint8_t* buffer, uint32_t len){uint32_t space = 0; /* 用于记录空闲空间大小 */#if FIFO_PARAM_CHECK/* 参数检查 */if((dev == 0) || (buffer == 0) || (len == 0)){return 0;}if(dev->buffer == 0){return 0;}#endif#if FIFO_SUPPORT_LOCKif(dev->mutex_lock != 0){dev->mutex_lock(dev->mutex);}#endif/* 限制len的最大长度为buffer大小 */if(len > dev->buffer_len){len = dev->buffer_len;}/* 计算空闲空间大小* 正常dev->len不应该大于dev->buffer_len*/if(dev->buffer_len >= dev->len){space = dev->buffer_len - dev->len;}else{/* 这里不应该出现, 出现则是异常 */dev->len = 0;space = dev->buffer_len;}/* 计算待写入大小, 如果len大于剩余空间则只写入剩余空间大小 */len = (len >= space) ? space : len;if(len == 0){#if FIFO_SUPPORT_LOCKif(dev->mutex_unlock != 0){dev->mutex_unlock(dev->mutex);}#endifreturn 0; /* 这里有可能无剩余空间,直接返回 */}/* 计算len的长度是否需要有绕回,需要分次写入 */space = dev->buffer_len - dev->in; /* 当前写入位置in到缓存末尾剩余可写入空间 */if(space >= len){/* 当前写入位置in到缓存末尾足够一次写入 */memcpy(dev->buffer+dev->in,buffer,len);}else{/* 当前写入位置in到缓存末尾不够,还需要绕回到前面写 */memcpy(dev->buffer+dev->in,buffer,space); /* 先写入tail部分 */memcpy(dev->buffer,buffer+space,len-space); /* 再写入绕回头部分 */}/* 更新写入索引和有效数据长度 */dev->in += len;if(dev->in >= dev->buffer_len){dev->in -= dev->buffer_len; /* 判断加减法 替代 dev->in %= dev->buffer->len */}dev->len += len; /* dev->len最大dev->buffer->len,无需%= dev->buffer->len */#if FIFO_SUPPORT_LOCKif(dev->mutex_unlock != 0){dev->mutex_unlock(dev->mutex);}#endifreturn len;}uint32_t fifo_out(fifo_st* dev, uint8_t* buffer, uint32_t len){uint32_t space = 0;#if FIFO_PARAM_CHECK/* 参数检查 */if((dev == 0) || (buffer == 0) || (len == 0)){return 0;}if(dev->buffer == 0){return 0;}#endif#if FIFO_SUPPORT_LOCKif(dev->mutex_lock != 0){dev->mutex_lock(dev->mutex);}#endif/* 判断是否有数据 */if(dev->len == 0){#if FIFO_SUPPORT_LOCKif(dev->mutex_unlock != 0){dev->mutex_unlock(dev->mutex);}#endifreturn 0;}/* 可读出数据量取需要的和有的之间的小值 */len = (dev->len) > len ? len : dev->len;/* 计算len的长度是否需要有绕回,需要分次读出 */space = dev->buffer_len - dev->out; /* 当前读出位置out到缓存末尾剩余可读出空间 */if(space >= len){/* 当前读出位置out到缓存末尾足够一次读出 */memcpy(buffer,dev->buffer+dev->out,len);}else{/* 当前读出位置out到缓存末尾不够,还需要绕回到前面读 */memcpy(buffer,dev->buffer+dev->out,space); /* 先读出tail部分 */memcpy(buffer+space,dev->buffer,len-space); /* 再读出绕回头部分 */}/* 更新读出索引和有效数据长度 */dev->out += len;if(dev->out >= dev->buffer_len){dev->out -= dev->buffer_len; /* 判断加减法 替代 dev->out %= dev->buffer->len */}dev->len -= len; /* 这里dev->len 不可能小于len,不会溢出 */#if FIFO_SUPPORT_LOCKif(dev->mutex_unlock != 0){dev->mutex_unlock(dev->mutex);}#endifreturn len;}uint32_t fifo_get_len(fifo_st* dev){uint32_t len;#if FIFO_PARAM_CHECK/* 参数检查 */if(dev == 0){return -1;}#endif#if FIFO_SUPPORT_LOCKif(dev->mutex_lock != 0){dev->mutex_lock(dev->mutex);}#endiflen = dev->len;#if FIFO_SUPPORT_LOCKif(dev->mutex_unlock != 0){dev->mutex_unlock(dev->mutex);}#endifreturn len;}int fifo_init(fifo_st* dev){#if FIFO_PARAM_CHECK/* 参数检查 */if(dev == 0){return -1;}#endif#if FIFO_SUPPORT_LOCKif(dev->mutex_init != 0){dev->mutex_init(dev->mutex);}#endifreturn 0;}int fifo_deinit(fifo_st* dev){#if FIFO_PARAM_CHECK/* 参数检查 */if(dev == 0){return -1;}#endif#if FIFO_SUPPORT_LOCKif(dev->mutex_destroy != 0){dev->mutex_destroy(dev->mutex);}#endifreturn 0;}
fifo.h
extern "C" {/*** \struct fifo_st* FIFO缓冲区结构.*/typedef struct{uint32_t in; /**< 写入索引 */uint32_t out; /**< 读出索引 */uint32_t len; /**< 有效数据长度 */uint32_t buffer_len; /**< 有效长度 */uint8_t* buffer; /**< 缓存,用户分配 *//* 以下用于临界段管理 */void* mutex; /**< 互斥量 */void (*mutex_init)(void* mutex); /**< 互斥量初始化 */void (*mutex_destroy)(void* mutex); /**< 删除互斥量 */void (*mutex_lock)(void* mutex); /**< 获取互斥量 */void (*mutex_unlock)(void* mutex); /**< 释放互斥量 */} fifo_st;/*** \fn fifo_in* 往fifo里写数据* \param[in] dev \ref fifo_st* \param[in] buffer 待写入的数据* \param[in] len 待写入的长度* \retval 返回实际写入的数据量*/uint32_t fifo_in(fifo_st* dev, uint8_t* buffer, uint32_t len);/*** \fn fifo_get_len* 获取fifo中有效数据长度* \param[in] dev \ref fifo_st* \return uint32_t 数据长度*/uint32_t fifo_get_len(fifo_st* dev);/*** \fn fifo_out* 从fifo读出数据* \param[in] dev \ref fifo_st* \param[in] buffer 存读出的数据* \param[in] len 需要读出的数据长度* \retval 返回实际读出的数据量*/uint32_t fifo_out(fifo_st* dev, uint8_t* buffer, uint32_t len);/*** \fn fifo_init* 初始化fifo* \param[in] dev \ref fifo_st* \retval 0 成功* \retval 其他值失败*/int fifo_init(fifo_st* dev);/*** \fn fifo_deinit* 解除初始化fifo* \param[in] dev \ref fifo_st* \retval 0 成功* \retval 其他值失败*/int fifo_deinit(fifo_st* dev);}
usbdev_fifo.c
typedef CRITICAL_SECTION fifo_mutex_t;static fifo_mutex_t s_fifo_tx_mutex[TX_FIFO_NUM];static fifo_mutex_t s_fifo_rx_mutex[RX_FIFO_NUM];static inline void fifo_mutex_init(fifo_mutex_t *mutex){InitializeCriticalSection(mutex);}static inline void fifo_mutex_lock(fifo_mutex_t *mutex){EnterCriticalSection(mutex);}static inline void fifo_mutex_unlock(fifo_mutex_t *mutex){LeaveCriticalSection(mutex);}static inline void fifo_mutex_destroy(fifo_mutex_t *mutex){DeleteCriticalSection(mutex);}static fifo_st s_tx_fifo[TX_FIFO_NUM] ={{.buffer = 0,.buffer_len = USBDEV_TX_FIFO_MAX_SIZE,.in = 0,.len = 0,.out = 0,.mutex = &s_fifo_tx_mutex,.mutex_init = fifo_mutex_init,.mutex_destroy = fifo_mutex_destroy,.mutex_lock = fifo_mutex_lock,.mutex_unlock = fifo_mutex_unlock,},{.buffer = 0,.buffer_len = USBDEV_TX_FIFO_MAX_SIZE,.in = 0,.len = 0,.out = 0,.mutex = &s_fifo_tx_mutex,.mutex_init = fifo_mutex_init,.mutex_destroy = fifo_mutex_destroy,.mutex_lock = fifo_mutex_lock,.mutex_unlock = fifo_mutex_unlock,}};static fifo_st s_rx_fifo[RX_FIFO_NUM] ={{.buffer = 0,.buffer_len = USBDEV_RX_FIFO_MAX_SIZE,.in = 0,.len = 0,.out = 0,.mutex = &s_fifo_rx_mutex,.mutex_init = fifo_mutex_init,.mutex_destroy = fifo_mutex_destroy,.mutex_lock = fifo_mutex_lock,.mutex_unlock = fifo_mutex_unlock,},{.buffer = 0,.buffer_len = USBDEV_RX_FIFO_MAX_SIZE,.in = 0,.len = 0,.out = 0,.mutex = &s_fifo_rx_mutex,.mutex_init = fifo_mutex_init,.mutex_destroy = fifo_mutex_destroy,.mutex_lock = fifo_mutex_lock,.mutex_unlock = fifo_mutex_unlock,}};void usbdev_fifo_init(void){for(int i=0; i{if(s_tx_fifo[i].buffer == 0){s_tx_fifo[i].buffer = malloc(USBDEV_TX_FIFO_MAX_SIZE);}fifo_init(&(s_tx_fifo[i]));}for(int i=0; i{if(s_rx_fifo[i].buffer == 0){s_rx_fifo[i].buffer = malloc(USBDEV_RX_FIFO_MAX_SIZE);}fifo_init(&(s_rx_fifo[i]));}}void usbdev_fifo_deinit(void){for(int i=0; i{if(s_tx_fifo[i].buffer != 0){free(s_tx_fifo[i].buffer);}fifo_deinit(&(s_tx_fifo[i]));}for(int i=0; i{if(s_rx_fifo[i].buffer != 0){free(s_rx_fifo[i].buffer);}fifo_deinit(&(s_rx_fifo[i]));}}uint32_t usbdev_tx_fifo_put(int i, uint8_t* buffer, uint32_t len){return fifo_in(&(s_tx_fifo[i]),buffer,len);}uint32_t usbdev_tx_fifo_get(int i, uint8_t* buffer, uint32_t len){return fifo_out(&(s_tx_fifo[i]),buffer,len);}uint32_t usbdev_rx_fifo_put(int i, uint8_t* buffer, uint32_t len){return fifo_in(&(s_rx_fifo[i]),buffer,len);}uint32_t usbdev_rx_fifo_get(int i, uint8_t* buffer, uint32_t len){return fifo_out(&(s_rx_fifo[i]),buffer,len);}uint32_t usbdev_rx_fifo_datalen(int i){return fifo_get_len(&(s_rx_fifo[i]));}
usbdev_fifo.h
extern "C" {void usbdev_fifo_init(void);void usbdev_fifo_deinit(void);uint32_t usbdev_tx_fifo_put(int i,uint8_t* buffer, uint32_t len);uint32_t usbdev_tx_fifo_get(int i,uint8_t* buffer, uint32_t len);uint32_t usbdev_rx_fifo_put(int i,uint8_t* buffer, uint32_t len);uint32_t usbdev_rx_fifo_get(int i,uint8_t* buffer, uint32_t len);uint32_t usbdev_rx_fifo_datalen(int i);}
测试代码usbdev_test.c如下
pthread_t s_test_thread;static uint8_t s_tx_buffer[TRANSFER_SIZE]; /* 发送数据 */static uint8_t s_rx_buffer[TRANSFER_SIZE]; /* 接收数据 */void delay(uint32_t ms){const struct timespec interval={.tv_nsec = ms*1000,.tv_sec = 0,};pthread_delay_np(&interval);}static void* test_thread(void *arg){if(0 != usbdev_run()){printf("usbdev_run err%d\r\n");return 0;}}int usbdev_test_run(void){for(size_t i=0; i<sizeof(s_tx_buffer); i++){s_tx_buffer[i] = i;}uint32_t rx_len = 0;int r = pthread_create(&s_test_thread,0,test_thread,0);if (r != 0){printf("failed to create test thread:%d\r\n",r);return r;}while(usbdev_state() != USBDEV_STATE_RUNING){delay(10);}while(1){int len;len = usbdev_write(0, s_tx_buffer, sizeof(s_tx_buffer));len = usbdev_read(0, s_rx_buffer, sizeof(s_rx_buffer));if(len > 0){rx_len += len;printf("get len:%d\r\n",len);}delay(100);if(rx_len >= 1024){break;}}usbdev_stop();printf("test done\r\n");}
usbdev_test.h如下
extern "C" {int usbdev_test_run(void);}
main.cpp中调用该函数即可
int main(int argc, char *argv[]){QCoreApplication a(argc, argv);usbdev_test_run();return a.exec();}
测试结果如下:
接收1024字节后退出
以上基于fifo实现了底层和应用层的解耦,方便应用层调用,后面就可以基于此合并之前gui框架,实现新版本的测试工具了。
