电子皮肤(E-skin)是一种机器人触觉系统,它附着在机器表面,通过传感单元检测压力,使机器人像人一样感知周围环境。为了满足机器人对弯曲、挤压、扭转等形变的精确触觉感知,国内外学者在可靠材料选择和新颖结构设计方面开展了大量的创新性研究。
据麦姆斯咨询报道,针对该领域研究进展,北京信息科技大学高国伟教授团队进行了综述分析,包括触觉传感器的分类及原理,通过对敏感材料的选择与调控以及新型敏感结构的设计来提高触觉传感器柔性和灵敏度的研究进展,以及多维力检测和多功能性的研究进展,并指出高灵敏度柔性电子皮肤当前面临的挑战和未来的发展方向。相关研究内容以“高灵敏度柔性电子皮肤的研究与应用进展”为题发表在《传感器与微系统》期刊上。
触觉传感器分类及原理
触觉传感器根据外界刺激转换为电信号方式的不同,主要可分为压电式、压阻式、电容式等。
压电式触觉传感器中最常用的压电材料是压电陶瓷(PZT)、氧化锌(ZnO)、钛酸钡(BaTiO₃)、聚偏氟乙烯(PVDF)及其共聚物。例如,Dagdeviren C等人研究了多种压电式压力传感器,其中一种通过蛇形路径连接到硅金属氧化物半导体场效应晶体管的几个方形压电薄膜上,如图1所示,场效应晶体管的作用是在施加压力时放大压电元件产生的电压。压电元件位于中性机械平面,以最大限度减少压力测量中的弯曲干扰,并允许传感器用于曲线表面,以检测压电压力波(BPW)。
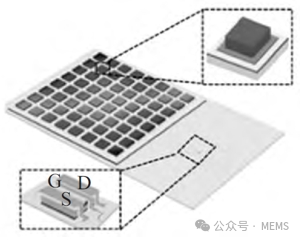
图1 压电电子皮肤(E-skin)传感器
压阻式触觉传感器在压力的作用下,材料的外部形状或内部结构会发生变化,从而引起电阻值变化。人类皮肤结构设计的灵感来源于现代公司在2015年开发的几种电子皮肤,如图2所示。该研究团队探索了互锁的几何图形,以压阻或压阻和压电配置模拟人类皮肤的表皮。互锁结构实现了由聚二甲基硅氧烷(PDMS)与多壁碳纳米管(MWCNTs)复合而成的微柱、微金字塔或微圆顶之间的接触点所定义的初始接触电阻。这种操作模式可以通过调整微结构的间距或尺寸来降低器件的电阻值,实现高灵敏度。
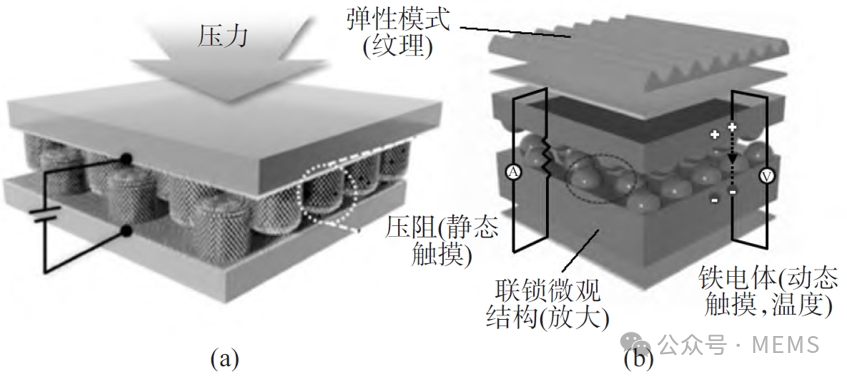
图2 现代公司开发的电子皮肤图
电容式触觉传感器的传感单元通常由2个平行的电极组成,通过被测力引起的电容量变化来检测受力信息。电容式触觉传感器具备结构比较简单、制造成本低、灵敏度高以及动态响应灵敏等特点。
柔性化研究
为了提高电子皮肤的柔性以满足机器人对弯曲、挤压、扭转等形变的精确触觉感知,PDMS、聚对苯二甲酸乙二醇酯(PET)、聚酰亚胺(PI)等聚合物材料被用来制造传感器的柔性基底,以提高传感器的柔性。此外,通过优化材料配比和优化结构设计也可以提高传感器的柔性,目前,网状、波纹状、岛桥等结构设计已用于电子皮肤柔性的提升。
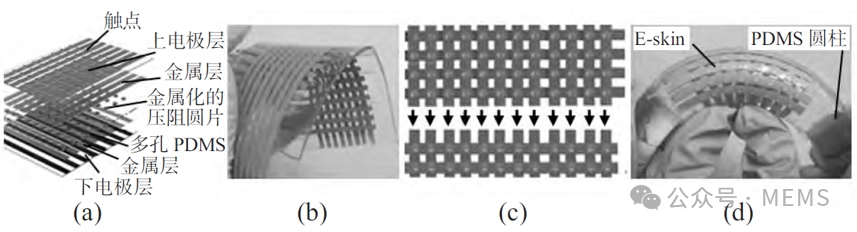
图3 高柔弹性的仿生电子皮肤压力传感器阵列
高灵敏度研究
触觉传感器的灵敏度通常是指在一定压力范围内,电信号的相对变化与压力变化的比值。敏感材料选择与调控影响着触觉传感器的检测灵敏度,不同的敏感材料和不同导电填料的质量分数和体积比灵敏度不同。在敏感结构设计方面,研究人员们提出了金字塔阵列、微凸结构、互锁结构等方法来提高传感器的检测灵敏度。
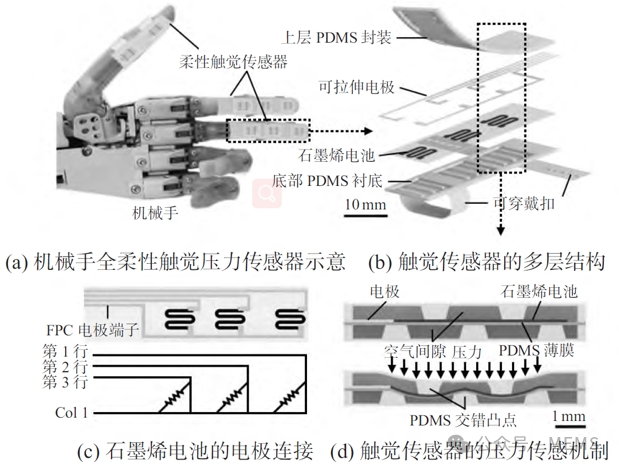
图4 全柔性触觉压力传感器
多功能检测研究
触觉传感器的应用越来越广泛,对形状和功能的要求也越来越高。特别是在一些复杂的环境中,更是需要精准检测,因此,触觉传感器必须具有微型化和多功能性。例如,Lee G等人报道了一种实现可伸缩多模态装置的方法,该装置基于压电性、摩擦电性和压阻性的各种电特性,超过了人类的触觉感知能力。所制备的多功能电子皮肤应用到机械手时,通过对集成刺激的感知和分析,可以实现仿生假肢的材料和纹理识别。
电子皮肤的应用
由于触觉传感器的高性能,在智能系统中的应用越来越广泛。研究电子皮肤不仅可以实现更智能的机器人,而且在可穿戴设备和医疗领域具有重要意义。例如,Cai F等人开发了一种摩擦电传感器,该传感器基于涂有铝的粗糙聚酯基底,与聚四氟乙烯薄膜接触,如图5所示,当放置在胸部时,可以检测呼吸、监测肌肉运动。
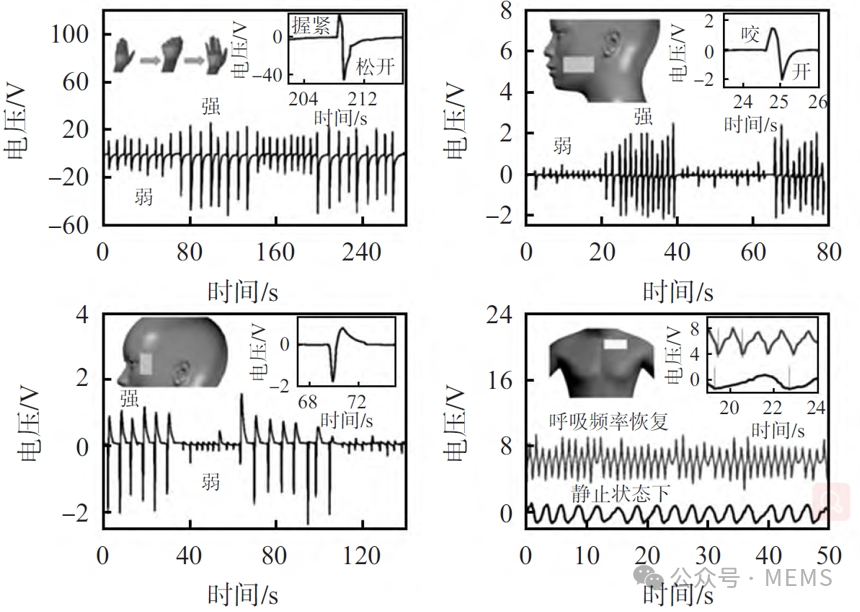
图5 监测人体肌肉运动的摩擦电传感器
研究结论与展望
目前,国内外学者在材料科学、柔性电子和纳米技术方面的研究已经取得了长足的进展,对电子皮肤的研制取得了很多成果,灵敏度和柔韧性得到了很大的提升。柔性电子皮肤在可穿戴设备、智能机器人和健康检测等领域的应用亦取得了很大进展。
虽然机器人电子皮肤的研究越来越多,但在实际应用中仍存在着挑战,如高灵敏度、高柔性的电子皮肤制造工艺复杂、成本高和难以批量生产。目前,柔性电子皮肤的发展仍然受材料与结构的限制,在测量精度上无法与传统成熟的金属及半导体传感器相比。在未来的研究中,需要继续探索电子皮肤新材料和新结构设计,从而实现更加灵活、智能和多功能化的高灵敏度、高柔性电子皮肤。
论文信息:
DOI: 10.13873/J.1000-9787(2023)07-0001-05