一、车载摄像头:视觉方案的关键
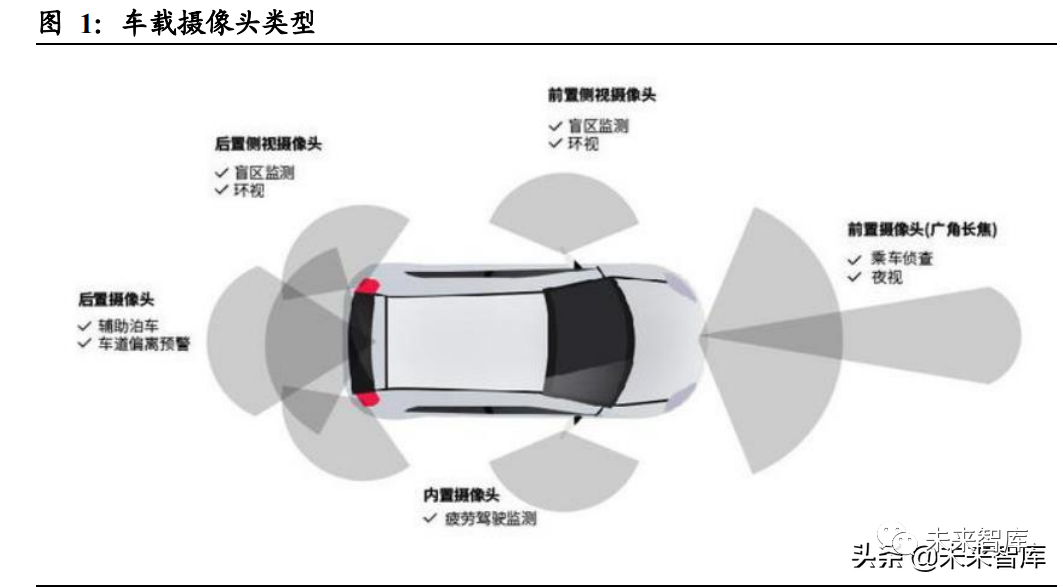
车载摄像头是智能驾驶汽车的重要传感器,功能是监控汽车内外环境以辅助驾驶员 行驶。按照安装位置的不同可以分为前视、后视、环视、内视等等。
从产业链脉络来看,从上游的晶圆、保护膜,到中游的 CMOS、DSP,再到下游的 模组,基本都具有高技术壁垒,由海外公司主导,在部分领域中国厂商已经开始起 步,但是均存在一定的追赶空间。
1、上上游:分为光学镜片、滤光片、保护膜、晶圆。
其中“光学镜片+滤光片+保护膜” 是镜头组的上游;晶圆是 CMOS 和 DSP 芯片的上游。
光学镜片制造原材料有光学玻璃和石英玻璃等,市场竞争激烈。
滤光片通常安装在摄像头镜头之后,接近图像传感器表面,是用来选取所需辐射波 段的光学器件,可改善图像质量。
滤光片基片多为白玻璃、有色玻璃、石英、塑料等。
海外供应商包括旭硝子、大真空、日本电波、Optrontec 等,主要来自日韩,国 内供应商包括水晶光电、欧菲光、激埃特等。
以海外厂商为主,国内水晶光电、海泰也有供应能力,但是市场竞争力仍存在一定的上升空间。
2、上游:分为镜头组、胶合材料、CMOS、DSP
“镜头组、胶合材料、CMOS”为模组 封装商的上游。
“DSP”为系统集成商提供 DSP。
用于车载摄像头的胶合材料主要为 UV 胶(Ultraviolet Rays),用于模组封装环节。供应商数量较多,市场竞争较为激烈,基本由欧美与日本厂商组成。
图像传感器主要分为 CCD 图像传感器(Charged Coupled Device Image Sensor,电 荷耦合器件图像传感器)和 CMOS 图像传感器(Complementary Metal-OxideSemiconductor Image Sensor,互补金属氧化物半导体图像传感器)两大类,CMOS 已经成为图像传感器市场的主导产品。
CCD 和 CMOS 图像传感器的主要区别在于 二者感光二极管的周边信号处理电路和对感光元件模拟信号的处理方式不同。
CCD 图像传感器中感光元件接受的模拟信号直接进行依次传递,在感光元件末端将所传 递的模拟信号统一输出,并由专门的数模转换芯片及信号处理芯片进行放大、数模 转化及后续数字信号处理,CCD 图像传感器具有高解析度、低噪声等优点,但生产 成本相对较高,主要用于专业相机、摄影机等设备。
而 CMOS 图像传感器中每个感光元件均能够直接集成放大电路和数模转换电路,无需进行依次传递和统一输出,再由图像处理电路对信号进行进一步处理,CMOS 图像传感器具有成本低、功耗小 等特点,且其整体性能随着产品技术的不断演进而持续提升。
由于 CMOS 图像传感器具有集成度高、标准化程度高、功耗低、成本低、体积小、 图像信息可随机读取等一系列优点,从 90 年代开始被重视并获得大量研发资源,其市场份额占比逐年提升。
目前已广泛应用于智能手机、功能手机、平板电脑、笔记 本电脑、汽车电子、移动支付、医疗影像等应用领域,成为移动互联网和物联网应 用的核心传感器件。目前,全球主要 CMOS 图像传感器供应商包括三星、索尼、豪威科技、格科微等。
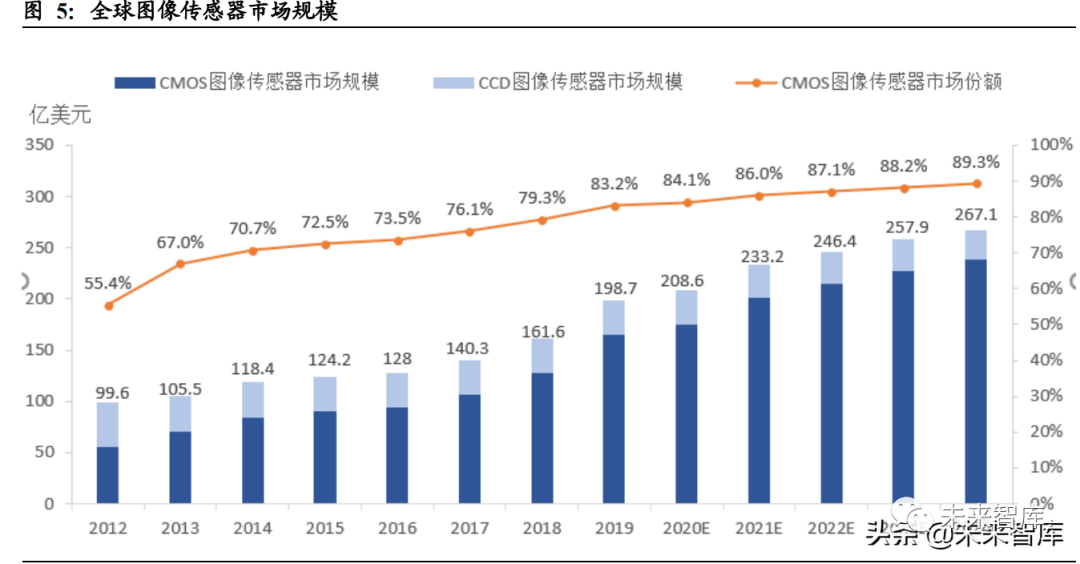
根据统计,2012年,全球图像传感器市场规模为 99.6 亿美元,其中 CMOS 图像传感器和 CCD 图像传感器占比分别为 55.4%和 44.6%。
随着 CMOS 图 像传感器设计水平及生产工艺的不断成熟,其性能及成本上的综合优势凸显,逐渐取代了部分 CCD 图像传感器的市场份额。
至 2019 年,全球图像传感器市场规模增长至198.7 亿美元,而 CMOS 图像传感器占比增长至 83.2%。
预计到 2024 年,全 球图像传感器市场规模将达到 267.1 亿美元,实现 6.1%的年均复合增长率,而 CMOS 图像传感器的市场份额也将进一步提升至 89.3%。
根据统计,2012 年,全球 CMOS 图像传感器出货量为 21.9 亿颗, 市场规模为 55.2 亿美元。
至 2019 年,全球 CMOS 图像传感器市场出货量为 63.6 亿颗,市场规模达到 165.4 亿美元,分别较 2018 年度增长了21.4%和 29.0%,相对于 2012 年的年均复合增长率分别达到 16.5%和 17.0%。
得益于智能手机、汽车电子等下游应用的驱动,预计未来全球 CMOS 图像传感器市场仍将保持较高的增长率,至 2024 年全球出货量达到 91.1 亿颗,市场规模将达到 238.4 亿美元,分别实现 7.5%7.6% 的年均复合增长率。
车载摄像头领域,CMOS 是主流传感器。
CMOS 全球市场份额来看,索尼常年占据了市场 40%以上的份额,其 CMOS 业务主要集中在手机。
但是车载应用 CMOS 的 行业龙头为安森美,韦尔股份旗下的豪威科技紧随其后。
根据数据, 车载 CIS(CIS:CMOS 图像传感器)市场,安森美占据龙头地位,市场占有率高达 60%,韦尔股份旗下的豪威科技占有率也在不断提升。
索尼和三星作为手机 CIS 的 龙头,进入车载市场较晚,正在快速切入。
DSP 芯片作用是将模拟信号转化为数字信号。
DSP 芯片头部厂商主要是德州仪器(TI)、模拟器件公司(ADI)和摩托罗拉(Motorola),其中德州仪器的市场占有率 最高,在 DSP 芯片市场中处于领先位置。
3、中游:分为模组供应商、系统集成商
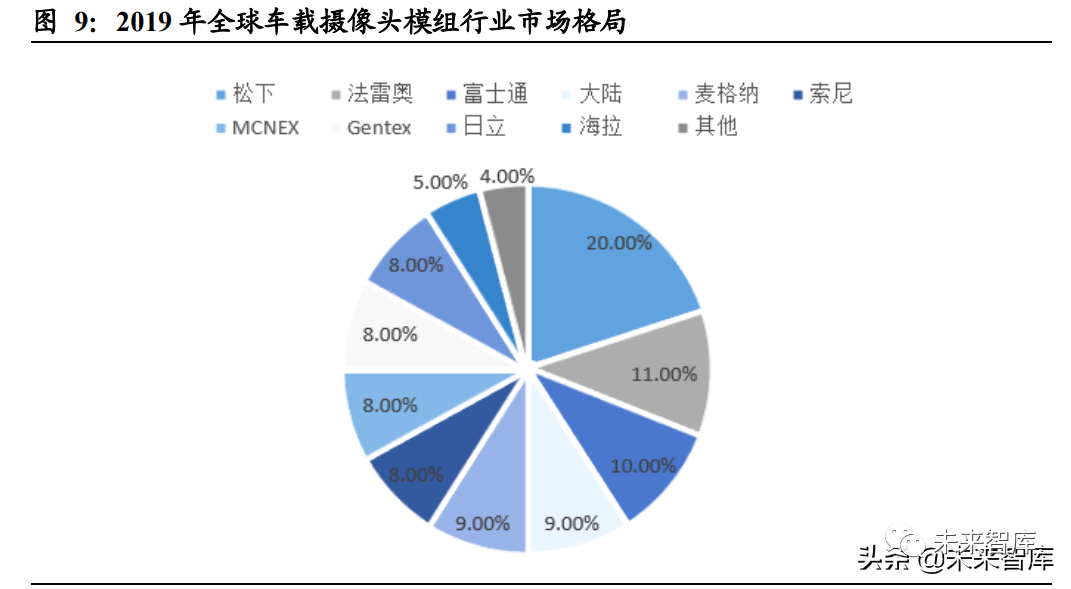
国外厂商在车载摄像头前装市场优势明显,占主要市场份额,头部公司包括索尼、 松下、法雷奥、麦格纳等等。
国内公司逐渐涌现,包括海康威视、德赛西威、舜宇 光学、联创电子、欧菲光、苏州智华、辉创电子、同致电子、信利国际、豪恩汽电 等,但是仍有一定的追赶空间。
国内的模组封装厂商主要包括舜宇光学和欧菲光,两家厂商在手机摄像头模组封装 领域发展迅速,已经进入车载摄像头模组封装领域。
非上市公司如苏州智华、深圳 豪恩、联合光学等模组封装厂商也在发展。
整体来看国产厂商与国外头部厂商存在明显差距。
4、下游:整车厂等
根据数据,全球平均每辆汽车搭载摄像头数量将从 2018 年的 1.7 颗增加至 2023 年的 3 颗。
我国 2020 年汽车摄像头平均搭载数量仅有 1.3 颗,市场空间巨大。根据我们的测算,2025 年国内乘用车车载摄像头市场空间约为 180 亿元。
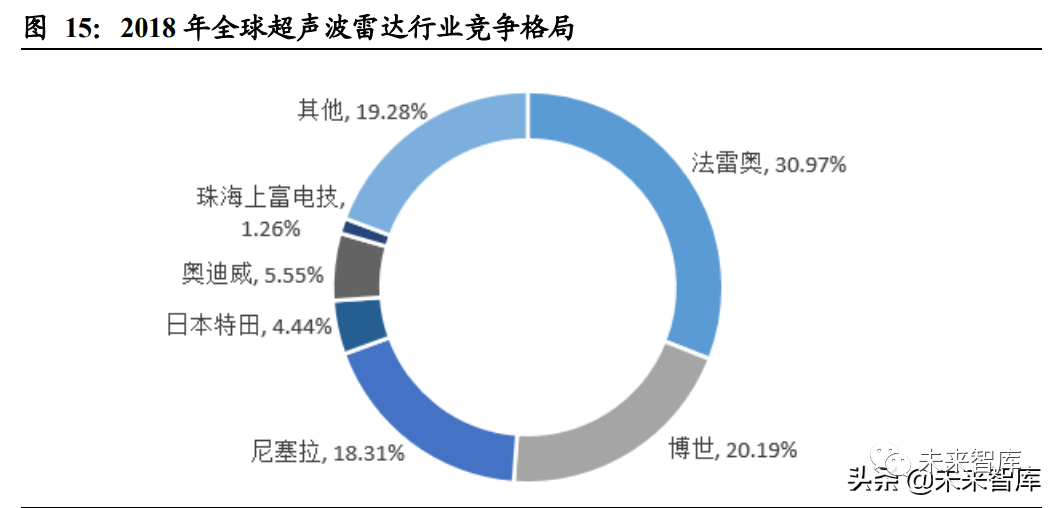
二、超声波雷达:逐步实现国产替代,市场格局几乎定型
超声波雷达常见的工作频率有 40KHz、48KHz、58KHz 等,由于频率越高,水平与 垂直方向的探测角度就越小,探测面积就越小,因此 40KHz 为最常见的频率。
超声 波雷达的探测范围基本在 0.1 米至 3.0 米之间,且超声波雷达技术成熟、性价比高, 是倒车、停车场景下最优的量产方案选择。
超声波雷达的缺点在于测试角度小需要 安装多个、测距短、只适用于低速场景等。
目前阶段,单车约配备 12 个超声波雷达 (倒车雷达安装 4 个超声波传感器,自动泊车系统在倒车雷达系统的基础上再增加 4 个 UPA(超声波驻车辅助,Ultrasonic Parking Assistant)和 4 个 APA(自动泊车 辅助,Automatic Parking Assistant)超声波传感器,合计 12 个)。
超声波雷达技术较为成熟,国内外差距主要在于传感器的稳定性、可靠性等方面。
目前超声波雷达已逐步实现国产替代,但中国超声波雷达厂商的研发能力较海外对 手仍有差距,且超声波雷达市场格局已经定型,中国厂商有望进一步缩小与海外对 手的产品力差距,但是发展空间较为有限。
三、 毫米波雷达:22GHz 转向 77GHz,国内外市场快速增长
上游:分为 MMIC 单片微波集成电路、天线高频 PCB 板、DSP/FPGA。硬件成本占 比约 50%
1、MMIC 单片微波集成电路:
国外:英飞凌 Infineon、TI、ST、ADI、NXP
国内:清能华波、加特兰微电子、厦门意行半导体、矽杰微电子、南京米勒
MMIC 包括多种功能电路,如低噪声放大器(LNA)、功率放大器、混频器、检波器、 调制器、压控振荡器(VCO)、移相器等。
MMIC 具有电路损耗低、噪声低、频带宽、 动态范围大、功率大、抗电磁辐射能力强等特点。MMIC 电路中核心芯片目前基本 来自恩智浦(NXP)、英飞凌、德州仪器(TI)等海外芯片设计公司。
MMIC 成本占比达到约 25%左右。

2、天线高频 PCB 板:
国外:Rogers、Isola、Schweizer
国内:沪电股份(上市)、生益科技(上市)
毫米波雷达天线的主流方案是微带阵列,将多根天线集成在 PCB 基板上实现天线的功能。
由于毫米波频率较高,对于电路尺寸精度有一定要求,因此选用高频板材 PCB 作为印刷电路板。目前雷达天线高频 PCB 板由沪电股份、Rogers(罗杰斯)、Isola、 Schweizer(施瓦茨,目前沪电股份持有公司 19.74%股权)、松下电工、雅龙等少数公司掌握。
国内大多数高频 PCB 板厂商暂无技术储备,只能根据图纸代加工,元器件仍需国外进口。
国内的沪电股份是大陆和博世的 PCB 板材供应商,目前已就 24GHz 和 77GHz 高频雷达用 PCB 产品与国际顶尖厂商 Schweizer 开展合作。
生益科技于 2016 年实现了产品出货,年产 150 万平方米高频 PCB 板一期项目已于 2019 年 3 月试产,预计 2020 年可实现满产。
天线高频 PCB 板成本占比达到约 10%左右。
毫米波雷达的核心部件为 MMIC(Monolithic Microwave Integrated Circuit,单片 微波集成电路)芯片和天线 PCB 板。
技术领先的国家对中国采取了技术封锁的手 段,核心芯片几乎被 TI、英飞凌、NXP、ADI、ST、富士通、安森美、瑞萨等国际 半导体公司垄断。
3、基带数字信号处理器(DSP/FPGA):
国外:英飞凌 Infineon、TI、ST、ADI、瑞萨 Renesas
国内:无
毫米波雷达的数字信号处理功能通过 DSP 芯片或 FPGA 芯片实现。
高端 DSP 芯 片和 FPGA 芯片主要被国外企业垄断,DSP 芯片供应商有飞思卡尔、英飞凌、亚德 诺半导体、意法半导体等公司,FPGA 芯片供应商有赛灵思、阿尔特拉、美高森美、 莱迪思等公司。
数字信号处理器(DSP/FPGA)成本占比达到约 10%左右。
中游:主要是毫米波雷达生产企业,软件成本占比达到 50%。
中游企业主要进行毫米波雷达算法研发。
算法需要大量数据支持,研发投入需求较大,是雷达性能的决定性因素之一。
根据波的传播理论,频率越高,分辨率越高,穿透力越强。
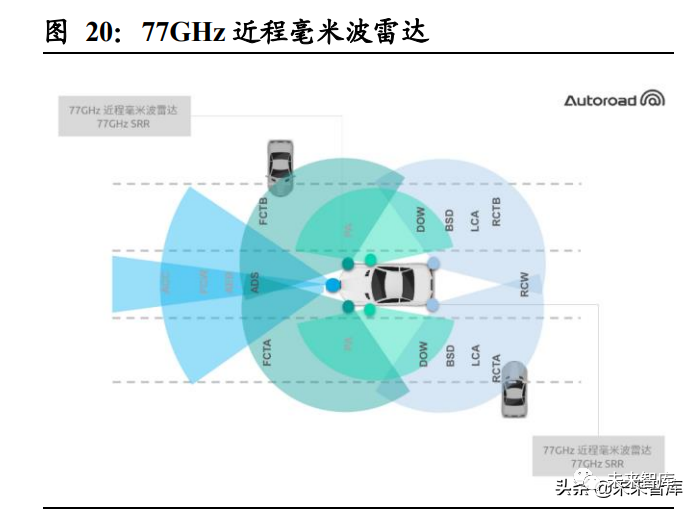
车用毫米波雷达工作频段为 21.65-26.65GHz 和 76~81GHz,主流车的工作频率是在 24GHz、77GH、79GHz 三个频率段附近。
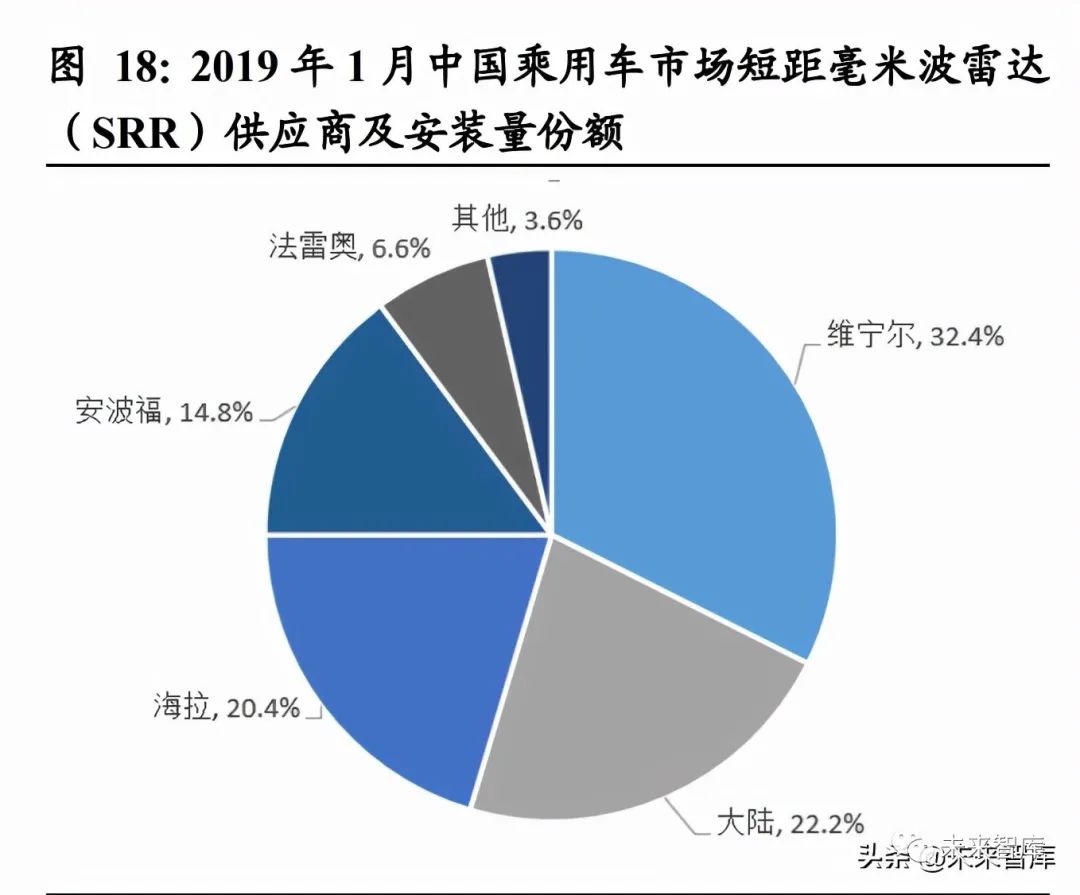
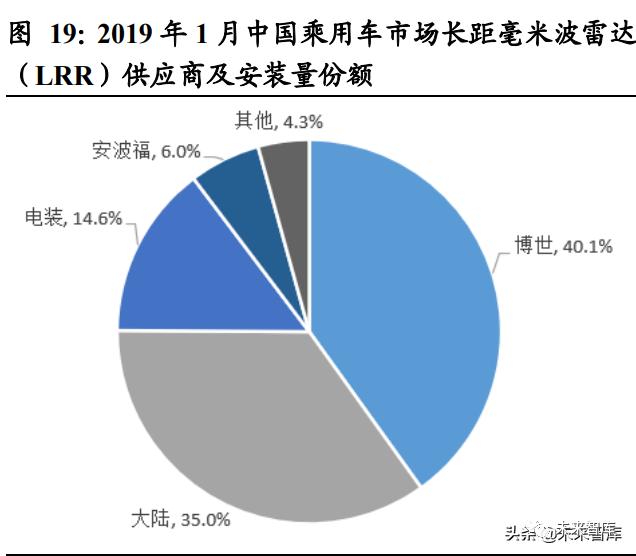
此前,各国给毫米波雷达分配的频段主要集中在 24GHz 和 77GHz, 24GHz 主要用于中短程探测(SRR、MRR);77GHZ 主要用于中远程的探测(LRR)。
从行业趋势来看,毫米波雷达的第一个发展方向是从 24GHz 转向 77GHz,79GHz 毫米波雷达则为更进一步的发展目标。
根据观察者网引用的第三方数据,中国市场中,24GHz 市场主要由法雷奥(Valeo)、 海拉(Hella)和博世(Bosch)主导,合计出货量占总出货量的 60% 以上;77GHz 雷达主要由大陆集团(Continental)、博世(Bosch)和德尔福(Delphi)主导。
根据数据,2018 年这三家在中国市场占据总出货量份额 80%。
2020 年我国毫米波雷达的市场规模为 180 亿元。
2021 年 1-11 月国内上市新车搭载前向/角毫米波雷达上险量为 1,186.91 万颗,同比增长 44.55%。
国内毫米波雷达产品总体仍处于研制阶段,2018 年开始能量产 24GHz 毫米波雷达, 目前 24GHz 毫米波雷达的产品体系已经相对成熟,供应链已经相对稳定。
24GHz 的核心芯片射频芯片能从英飞凌、飞思卡尔等芯片供应商获得。
中国华域汽车、森思泰克、湖南华纳、安智杰等企业已实现 24GHz 毫米波雷达产品大规模量化。
但英飞凌、飞思卡尔、意法半导体等芯片商对中国并没有放开 77GHz 毫米波雷达芯片 的供应,因此国内 77GHz 毫米波雷达的发展较慢。
国内布局毫米波雷达领域的公司包括传统零部件企业和初创企业两类。
传统零部件 公司包括德赛西威、华域汽车、保隆科技等。
初创公司包括森思泰克、行易道、安 智杰、安智汽车、承泰科技、楚航科技、川速微波等。
部分企业已实现 24GHz 和 77GHz 毫米波雷达传感器量产。
相较于激光雷达、摄像头等,毫米波雷达具备全天候全天时的探测能力,即使在雨雪、尘雾等恶劣环境条件下依旧可以正常工作,且毫米波雷达直接测量距离和速度, 对目标运动状态的检测更为方便。
我们认为国内外毫米波雷达市场仍将保持快速增长:
(1)单车装载数量提升:
基于其技术优势,我们认为毫米波雷达的单车搭载量将随着 汽车智能化的发展而不断攀升。根据中国产业信息网数据,2015 年,中国车载毫米 波雷达销量为 180 万颗,平均每 12 辆车配装 1 颗。现阶段大多数智能化程度更高 的汽车采用 4 个短距毫米波雷达+1 个长距毫米波雷达的装配模式,如小鹏 P5、蔚 来 ES8 和 ET7 均装配 5 颗毫米波雷达。
(2)单价提升:
从单价来看,24GHz 毫米波雷达在 500 元左右,而 77GHz 的毫米波 雷达系统在 1,000 元左右。由于 24GHz 将被逐渐替换为 77GHz、79GHz,因此单车 价值进一步提升。
(3)汽车智能化渗透率提升:
目前 L2 渗透率较低,2020 年国内约为 15%。汽车智能 化为大势所趋,我们认为 L2 以上的渗透率将逐年稳定、快速提升。智能汽车渗透 率的提升将强势拉动毫米波雷达需求。
四、激光雷达:迎来量产元年,国产有望弯道超车
上游:主要由激光器、探测器、主控芯片、模拟芯片及光学部件 5 个部件组成。芯 片(主控芯片 FPGA 及模拟芯片)领域国内外差距比较大,国外厂商占据主要市场;光学部件、激光器与探测器等领域,国内相关公司可以做到国产替代,可实现灵活 定制,成本优势比较明显。
1、激光器(属于发射系统,分为固体激光器、半导体激光器、气体激光器等):
OSRAM (欧司朗)、AMS(艾迈斯半导体)、lumentum(鲁门特姆)、瑞波光电子(力合科创 (上市)持股 9.13%)、纵慧芯光(VCSEL 芯片,是激光雷达的光源,华为投资)、 炬光科技(上市)
激光器实现发射光束的光源作用。
激光器从发射维度看可以分为两大类:边发射(EEL)和垂直腔面发射(VCSEL)。
EEL 作为探测光源具有高发光功率密度的优势,但 EEL 激光器因为其发光面位于 半导体晶圆的侧面,使用过程中需要进行切割、翻转、镀膜、再切割的工艺步骤, 往往只能通过单颗一一贴装的方式和电路板整合,而且每颗激光器需要使用分立的 光学器件进行光束发散角的压缩和独立手工装调,极大地依赖产线工人的手工装调 技术,生产成本高且一致性难以保障。
垂直腔面发射激光器(Vertical Cavity Surface Emitting Laser,VCSEL)其发光面与半导体晶圆平行,具有面上发光的特性,其所 形成的激光器阵列易于与平面化的电路芯片键合,在精度层面由半导体加工设备保 障,无需再进行每个激光器的单独装调,且易于和面上工艺的硅材料微型透镜进行整合,提升光束质量。
传统的 VCSEL 激光器存在发光密度功率低的缺陷,导致只在对测距要求近的应用 领域有相应的激光雷达产品(通常小于 50m)。
近年来国内外多家 VCSEL 激光器公 司纷纷开发了多层结 VCSEL 激光器,将其发光功率密度提升了 5~10 倍,这为应 用 VCSEL 开发长距激光雷达提供了可能。结合其平面化所带来的生产成本和产品 可靠性方面的收益,VCSEL 未来将有望逐渐取代 EEL。
目前市场主要参与者仍以海外厂商为主,包括 OSRAM(欧司朗)、AMS(艾迈斯半 导体)、Lumentum(鲁门特姆)等;国产厂商包括深圳瑞波光电子有限公司、常州 纵慧芯光半导体科技有限公司等。
2 探测器:
sony、First Sensor、Hamamatsu 滨松光子、ON Semiconductor 安森美、量 芯集成、灵明光子(小米投资)、南京芯视界(SPAD,华为投资)。
从竞争格局来看, 目前探测器领域仍以国外厂商为主。
探测器属于接收系统,分为 SiPM 探测器(硅光电倍增管)、APD 探测器(雪崩光电 二极管)、SPAD 探测器(单光子雪崩二极管)等。
单光子器件(SPAD)具有极强的感光能力,在生物医学的荧光探测领域和核磁影像领域已经取得了广泛的应用,然而由于硅材料对激光雷达所采用的近红外光波段的 吸收系数较弱,导致在激光雷达接收端的测量灵敏度不及当前在激光雷达中广泛 使用的线性雪崩二极管探测器 APD。
近年来,因为激光雷达行业的兴起,国内外多家探测器公司在不断优化单光子器件在近红外波段的量子效率,在实际探测灵敏度 方面已经逐渐超越了 APD。
未来几年内,随着设计和工艺的进一步优化,单光子探 测器对 APD 性能的优势将越发明显。
3FPGA(信息处理):Intel、Xilinx(两个海外巨头)、紫光国微(上市)、智多晶(小米投资)

一、硬件——芯片:智能驾驶核心
智能驾驶汽车芯片按照产品功能可以分为三类:
第一类是 ADAS 芯片。
ADAS 意为高级驾驶辅助系统,用于实现 L1-L2 级别的辅助驾驶功能。
目前智能驾驶汽车芯片的主要市场集中在 ADAS 驾驶辅助领域。
第二种是基于 GPU 的智能驾驶汽车芯片。
目前 Mobileye、英伟达和特斯拉等公司推出商用产品。
第三种是支持智能驾驶功能的外围芯片。
如 5G 芯片、V2X 芯片、数字座舱芯片、 虚拟仪表芯片、信息安全芯片、胎压监测芯片和域控制器芯片等。这些芯片起到为 智能驾驶提供辅助、支持的作用。
1、智能驾驶芯片的发展趋势
CPU、GPU、FPGA、ASIC 将依次成为智能驾驶芯片的发展趋势。
过去汽车的电控 单元 ECU 使用 CPU,随着数据量的提升,传统 CPU 的算力不足以支撑,因此 GPU 逐渐开始替代 CPU。
由于智能驾驶需要进行大量的计算处理,算力需求进一步增加, FPGA 与 GPU 相结合成为当前的主流方案;
着眼未来,当现有方案难以支撑计算需求的时候,ASIC 或将成为未来的发展方向。
对于 L0/L1 级系统,传统的车规级 CPU 即可满足需求;对于 L2 至 L3 级别,目前采用的主流方案是 FPGA 和 GPU 相结合,但是 FPGA 芯片硬件编程复杂性太高, GPU 算力也强,但功耗和价格太高,不适合大规模量产,因此仍需要进一步发展。
2、竞争格局
智能驾驶芯片行业参与者较为多样化。
有以恩智浦、德州仪器为代表的传统汽车芯片厂商,有英特尔、高通、英伟达等电子芯片巨头,有以特斯拉为代表的车企,以 及以地平线、芯驰科技为代表的创业公司。
英特尔、英伟达等是较早布局智能驾驶芯片的企业,目前占据了全球智能驾驶芯片 市场的较大份额,从市场份额出发,属于汽车芯片市场的第一梯队。
英伟达定位在 L3 及以上等级的智能驾驶,作为 GPU 的发明者,在汽车主控芯片的 GPU 市场处于垄断地位,常年保持 70%的市场占有率。
目前英伟达的 Orin 芯片是技术最为成熟的智能驾驶域控制器芯片,在 L2+以上的智能驾驶领域具有较大的技术优势,目前国内的主机厂要进行 L3 与 L4 级别的智能驾驶的开发基本只能选择英伟达的芯片。
目前奥迪车型、特斯拉前期车型、小鹏、威马,以及大量的主流新能源乘用车都是基于英伟达的 Xavier 或者 Orin 芯片,算力级别主要是 30TOPs,2022 年推出的蔚来 ET7、小鹏 G9 等高端车型可能高达 500-1000Tops。
高通和华为位于第二梯队。
高通与英特尔、英伟达同属世界芯片巨头,但是高通在智能驾驶芯片领域相较于竞争对手少了筹码。
2016 年,高通拟以 440 亿美元天价收购半导体公司恩智浦(NXP),并申请 9 个国家的反垄断批准。
但因未获得中国地区的反垄断批准,最终高通的收购计划落空,向恩智浦赔付 20 亿美元解约费。
在智能驾驶领域,高通于 2020 年 1 月推出了 Snapdragon Ride 平台,可提供不同等级的算力,包括以小于 5 瓦的功耗提供的 L1 级别的 10 TOPS 算力,以及 100 多瓦功耗、 700 TOPS 算力的配置下,整个系统的功耗差不多会在 100 多瓦左右,但这更多是瞄准 2023 年之后的车型。
不过高通凭借在通信及消费电子领域的优势,基于智能手机芯片的经验,成为智能座舱芯片领域的行业龙头。
长城汽车车载智能芯片由高通公司负责,长城汽车在 2022 年推出的高端车型上将会率先采用高通 Snapdragon Ride 平台,应用到其智能驾驶系统中。
长城汽车的另一 个合作伙伴是华为,其将为长城汽车提供以 MDC 为基础的高算力智能驾驶计算平台。

华为面向智能驾驶领域推出多款 MDC 计算平台系列。硬件平台内部包含了两个核 心芯片,分别是 CPU 处理器和 AI 处理器。
CPU 采用鲲鹏芯片。
业界推测 AI 芯片采用的是昇腾 310 芯片。
除了长城汽车外,北汽、长安也与华为有深度合作,2021年新车型或有望逐步推出。
第三梯队是其他的第三方芯片厂商,其中就包括地平线、云途、黑芝麻等国产公司。
以地平线为例,地平线的“征程 3”智能驾驶芯片进入 2021 款理想 ONE,取代了理想 原来采用的 Mobileye 芯片。
截至 2020 年底,地平线征程系列芯片出货量已经超过 16 万片,继征程 2、征程 3 之后,面向 L4 高等级智能驾驶的征程 5 芯片也已一次 性流片成功,将于年内正式发布。
国内芯片厂商成长很快,众多车企考虑地平线、黑芝麻等作为 back-up plan,避免 出现芯片供应问题;同时国际芯片大厂研发部门不在国内,车企难以从国际芯片厂 商学习芯片相关技术,这是本土芯片厂商的优势。
除此之外,越来越多的车企也开始尝试自主研发智能驾驶芯片。
国外车企以特斯拉为代表。
特斯拉早期搭载的芯片包括 Mobileye EyeQ3 与英伟达 DRIVE PX2,后期选择自研 FSD 芯片自用。
在国内市场,蔚来汽车在今年 10 月被曝出有意涉足智能 驾驶芯片这一领域,造车新势力零跑汽车推出了具有自主知识产权的凌芯 01 智能驾驶芯片。
吉利集团旗下亿咖通科技与云知声共同出资成立合资公司芯智科技。此外比亚迪、长城汽车等也在芯片业务上有所布局。
促使车企自主研发的原因有很多。首先,以 Mobileye 为代表的芯片供应商提供的芯 片和算法紧密耦合且打包出售,车企希望通过自主研发获得更多自主权。
其次, 企自研智能驾驶芯片可以降低成本、积累人才,增强品牌效应。此外,车企自研芯 片可以节省采购开支。
二、硬件——域控制器:智能驾驶大势所趋
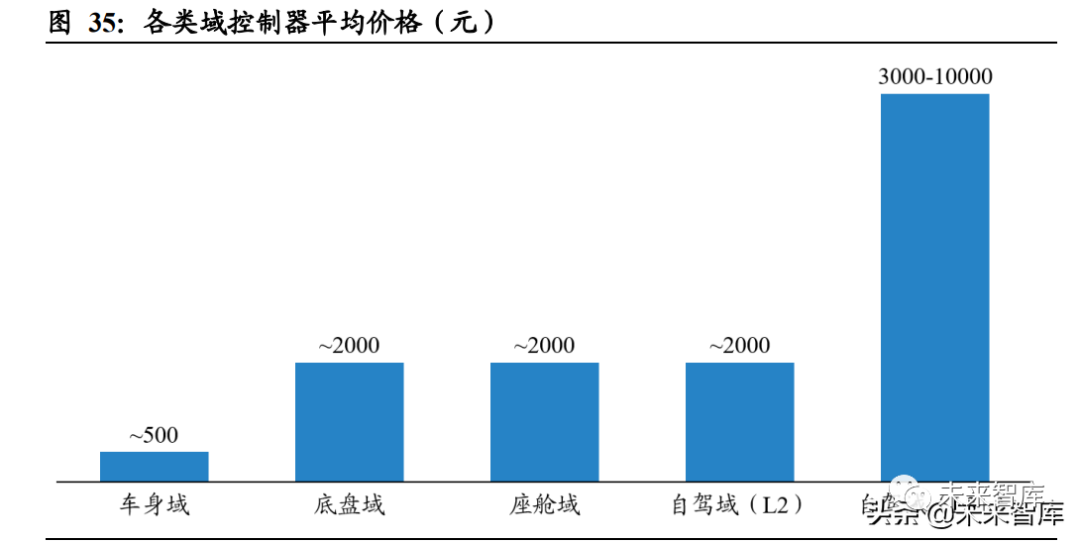
从单车价值量看,自驾域单车价值量较大。
目前市面 L3 级以上的智能驾驶域控制器的单价在 3,000 元~10,000 元左右,L2 级自驾域单价 2,000 元左右;座舱域控制器的单价在 2,000 元左右;底盘域由于需要达到 ASIL-D 安全等级,故价格和座舱域相当,也是 2,000 元左右;车身域控制器单价在 500 元左右。
国内外巨头纷纷布局智能驾驶域控制器。
目前智能驾驶域控制器主要有四类玩家:
1、头部新势力企业,如特斯拉自研智能驾驶芯片,蔚来自研域控制器然后找第三方 代工;
2、国际 Tier1,自己与芯片商合作,做方案整合后研发域控制器并向整车厂 销售,例如大陆 ADCU、采埃孚 ProAI、麦格纳 MAX4 等;
3、域控软件供应商,例 如 TTTech 与上汽集团合资成立了创时智驾,为上汽成员企业配套智能驾驶域控制 器产品;
4、本土 Tier1,根据英伟达在 10 月云栖大会上公布的信息,目前采用英 伟达 Orin 系列方案的车企客户包括奔驰、沃尔沃、蔚来汽车、小鹏汽车、理想汽 车、上汽智己以及 R 汽车,德赛西威拿到了其中大部分的域控制器定点订单。此外 还有华为、经纬恒润、福瑞泰克等企业布局了这一领域。
市场空间:根据产业链调查,智能驾驶域控制器方面,预计国内市场 2025 年出货量 将超 400 万套,随着支持 L3 级智能驾驶的域控制器逐渐放量,平均价格有望从现 在 2000 元左右提升 3000 元以上;座舱域控制器方面,预计 2025 年出货量将超 500 万套,随着入局者增多行业区域成熟,价格略微下滑。预计国内市场 2025 年座舱+ 智能驾驶域控制器市场规模将超 200 亿元。
三、软件——底层软件、中间件、上层应用软件:软件定义汽车
E/E 架构:分布式架构向域集中架构演进
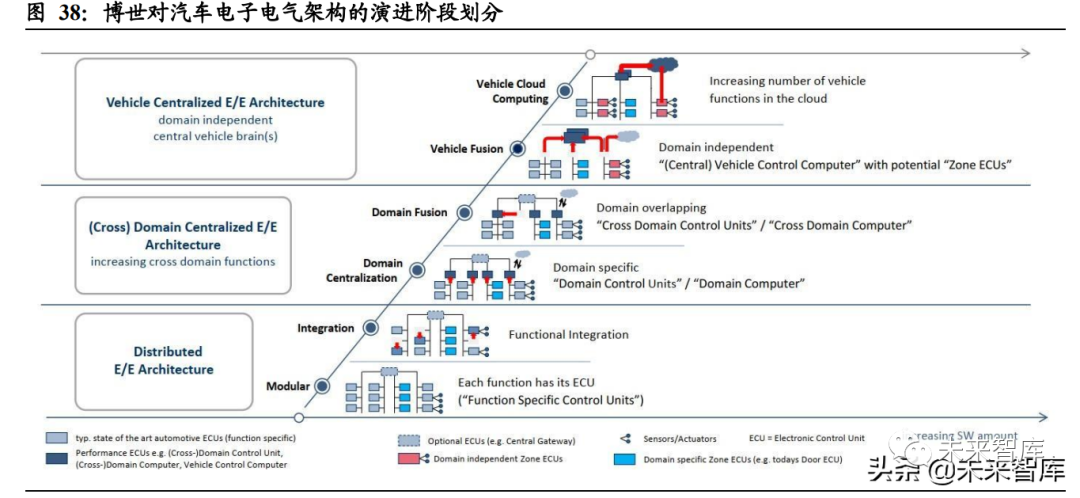
博世提出 E/E 架构的演进有三个阶段:分布式电子电气架构、域集中电子电气架构、 车辆集中电子电气架构。
过去以及现在的绝大多数车企的车型都仍然处于分布式电 子电器架构阶段,目前已经有少部分车型进入域集中电子电气架构。因此现阶段域 控成为车企的转变方向。
分布式电子电气架构朝域集中电子电气架构演进主要有以下几点优势:
1、提升算力利用率。
分布式的汽车电子电气架构中,各类电子控制单元(ECU)的 芯片仅在对应功能运行期间执行运算工作,其余时段芯片处理能力处于闲置状态, 算力的利用效率较低。在汽车功能日趋丰富的趋势下,采用分布式的汽车电子电气 架构将导致电子控制单元(ECU)数量的增加,造成更大的算力闲置。
而域集中式的芯片算力的利用效率大幅提高;
2、信息处理能力更强。
域集中式架构提高了汽车对各类信息的融合处理能力,整车功能协同得以强化。
分布式汽车电子电气架构中,通常采用一个功能对应一套硬件, 功能间交互困难。
而在域集中式汽车电子电气架构中,处于同一域中的功能对应一 个域控制器,同域功能间实现协同交互;
3、域集中式的汽车电子电气架构将同一功能域下的电子控制单元(ECU)集成,线束的长度和数量较分布式汽车电子电气架构大幅减少,减少了车身重量,符合轻量 化的趋势,也减少了成本。
在分布式架构中,ECU 被运用在制动系统、变速系统、 悬架系统、安全系统、驱动系统等方方面面,几乎车辆的每一个独立功能和传感器都需要配备一个 ECU。
2019 年,中国汽车单车 ECU 数量为 25 个,目前在高端车型与智能化程度高的车型中主要 ECU 的数量达到 100 多个,加上一些简单功能的 ECU 总数可以超过 200 个。
除此之外,同一车辆上的不同 ECU 之间也需要通过 CAN 和 LIN 总线连接在一起,因此 ECU 数量的增多也导致了总线线束的数量和复杂程度的大幅提升。
总线线束的增加首先会增加车重,同时由于线束的主要材料为铜,线束的增多会较显著地提高单车成本。
域控架构将模块内多个 ECU 的功能集成到了 一个域控制器中,可以很大程度地控制 ECU 数量,简化线束。
4、方便 OTA 升级。
分布式架构中 ECU 分散,而域集中式的汽车电子电气架构将同 一功能域下的电子控制单元(ECU)集成,能够应对 OTA 的升级需求。
E/E 架构的演变可以分为三个维度:硬件架构(分布式向域集中发展)、软件架构(软 硬件耦合向解耦发展)和通信架构(LIN/CAN 总线向以太网发展)。由于公司处于 汽车软件赛道,因此重点探讨软件架构的变革。
软件架构:高度耦合转为分层解耦
软件架构从软硬件高度耦合向分层解耦方向发展。在过去的分布式电子电气架构阶 段,软件嵌入于硬件中,嵌入式状态下难以对软件进行改变。在域集中电子电气架 构阶段,由域控制器完成域内的协调工作。
由于域控制器需要控制整个域,因此来自不同供应商的软硬件必须要解耦才能方便对软件部分进行修改,以求达到基础软 件可以复用、硬件接近即插即用的效果。因此软硬件解耦成为域集中式架构下的重要趋势。
在分层软件的理念中,整个软件架构建立于硬件之上,软件架构内又大致可以分为 三层结构:
1、系统软件层:包括虚拟机、系统内核、POSIX、Autosar 等;
2、功能软件层:多为中间件和开发框架;
3、应用软件层:包括智能座舱 HMI、ADAS/AD 算法、网联算法、云平台,以及其他应用软件。
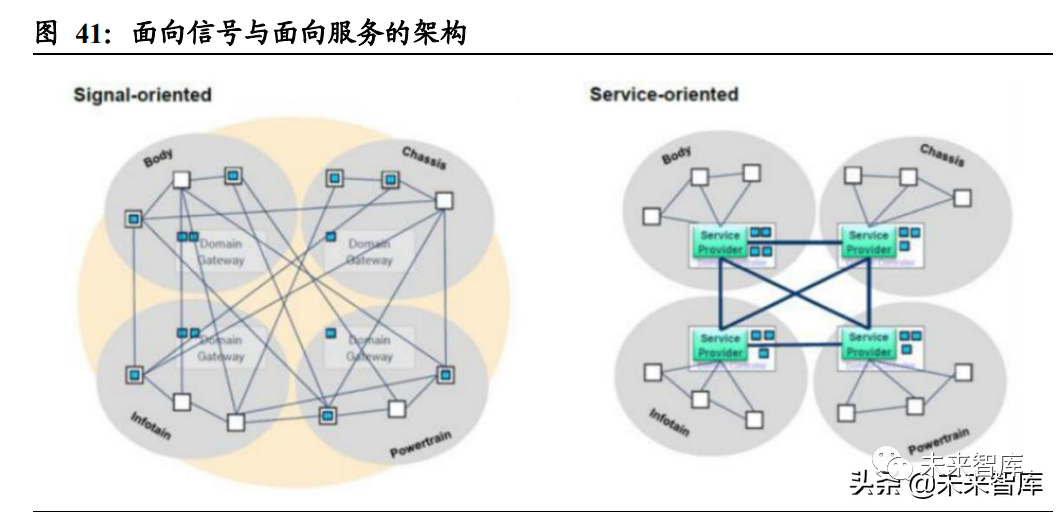
“软件定义汽车”的时代,具备高速通信、更高算力、丰富图像感知能力的各种硬件 给软件提供了强大的基础运行平台,汽车电子软件将由单一功能架构演变为面向服 务架构(SOA)。
SOA 正在成为软件架构的新主流,引领着汽车软件架构朝着分层、 模块的方向发展。
Gartner 把 SOA 定义为一种软件设计方法。
SOA 与大多数通用的 C/S 架构模型不同,它着重强调构件的松散耦合,并强调模块化,使用独立的标准接口。
将应用程 序的不同功能单元(称为服务)通过这些服务之间定义良好的接口和契约联系起来。
接口是采用中立的方式进行定义的,它独立于实现服务的硬件平台、操作系统和编程语言。
SOA 将汽车各子系统中最小功能的逻辑单位抽离出来,封装成服务,组成一种粗粒度小、松耦合的服务架构。
SOA 的优势在于将原本分散的 ECU 和对应的软件进行模块化,在硬件更换的情况下,软件、接口等依旧存在,避免了过去软硬件结合情况下,更换了硬件后软件也 跟着被完全替换的问题。
经典AUTOSAR(Classic AUTOSAR)及自适应 AUTOSAR(Adaptive AUTOSAR)混合方式是实现软硬分离的主要途径。
AUTOSAR 可提供标准的接口定义、软件模 块化设计,从而令软件及其组件不受硬件影响。经典 AUTOSAR 主要面向基于电 子控制单元 (ECU)的传统汽车嵌入式软件,自适应 AUTOSAR 主要面向更为复 杂的基于域控制器或中央计算平台的汽车电子软件。
其中,自适应 AUTOSAR 相 较于经典 AUTOSAR 能够更好支持强大算力的多核 SoC、服务可灵活部署、支持空中升级(OTA)等优势,更符合“软件定义汽车”理念下对汽车电子软件的要求。
四、高精度地图:资质壁垒下行业集中度高
高精度地图是面向智能驾驶汽车的地图数据范式,其高精度体现为:
1、坐标精度更 高,其绝对位置精度接近 1m,相对位置精度在厘米级别(能够达到 10~20cm);
2、包含更多的道路交通信息元素,例如准确的道路形状、车道线的种类及颜色、每条 车道的限速要求等特质特性。
高精度地图具备定位、感知、规划及决策四大功能,通过三大图层架构及在线服务 面向智能驾驶使用场景。
基于三大图层架构,高精度地图可以实现定位、感知、规划及决策,以匹配智能驾驶场景下的需求。
为什么高精度地图是实现智能驾驶的关键组成?
在 L3 以上的高阶智能驾驶中,对于车身环境的监控主体从驾驶员变为了系统。
只有当系统能够自动地探查与分析附近区域的状况时,高阶智能驾驶才具备实现基础。若没有高精度地图的辅助,仅依靠汽车传感器、惯性导航、计算单元等,智能驾驶 传感系统存在鲁棒性缺陷。
而搭配高精度地图,基于定位图层的 Landmark,通过与感知结果匹配并计算距离,可以精确计算出车辆当前的位置,与其他技术手段得出 的高精度定位结果相互冗余,保证车辆时刻知晓自身位置。
此外,高精度地图不存 在距离和视觉的缺陷,在特殊天气条件下依旧可使用。
高精度地图与普通电子地图的区别是什么?
两者的本质差别在于面向对象的不同。
普通电子地图面向对象为人,以人的认知为基础,解决的需求包括规划路线、确认地点、辨别方位等,而高精度地图面向对象为智能驾驶算法,面向的是“一台机器”,数据将作为智能驾驶算法的输入端,解决 的需求包括环境感知、高精度定位、规划与决策等,是智能驾驶汽车行驶上路的“行 动指南”。
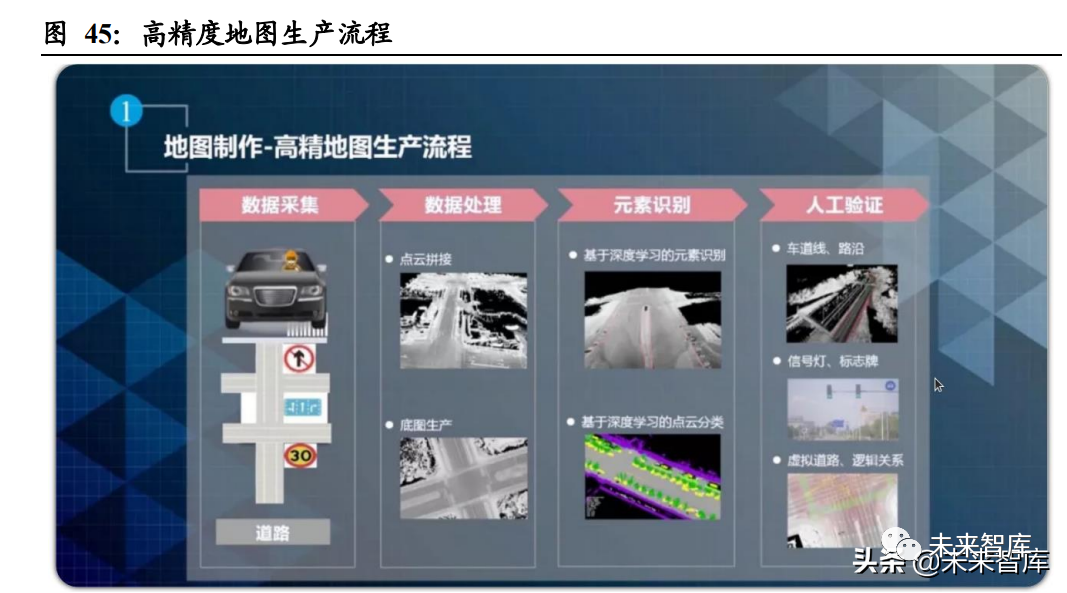
高精度地图制作的技术门槛及成本较高。
普通电子地图主要依据 GPS+卫星图片进 行制作,其制作流程相对简单。
反观高精度地图,其生产步骤包括:(1)数据采集、( 2)数据处理、(3)元素识别、(4)人工验证。
数据采集依赖高精度地图采集车,其具备采集点云数据的激光雷达装置、进行高精定位的 RTK 装置、获取车辆角度和加速度的惯导系统等,单车成本在百万级别;
数据处理方面,数据分为点云和图像两类, 因为高精度要求,所以制图以点云为主。
点云图像处理后得到一个高精度图像,基于图像可以做精确的车道线识别,获得车道线的形状特征;元素识别方面,基本上都是使用深度学习来获取地图的要素识别,例如尝试从点云中提取车道线、灯杆、 红绿灯等;人工验证方面,这一环节由人工完成,自动化处理的数据还不能百分百 准确,需要人工在进行最后一步的确认和完善。
对于修正后的数据,需要上传到云端,最终形成的高精度地图也通过云平台进行分发。
除了精度提升至厘米级外,高精度地图的更新频率远高于普通地图。
普通地图更新 频率一般是一个季度,而高精度地图的理想更新频率是 1 个小时。
高更新频率所带来的技术难点主要为:
(1)图商需要足够数量的采集车辆去更新数据;
(2)高精度地图的数据量巨大,对于车机的芯片存储及传输能力要求高。

执行层是汽车驾驶的最底层,其核心运行机制是通过驱动、制动及转向控制系统的 相互配合,使汽车能够稳定行驶。
当驾驶员将车辆的驾驶操控完全移交给智能驾驶 车辆的车载计算机系统后,电子信号就代替机械液压方式去对方向盘、油门和制动 系统进行控制。
上述运行机制称之为线控执行,其主要包括线控油门、转向及制动。智能化浪潮下,电信号替代机械力的线控技术在智能驾驶时代的渗透率大幅攀升。
三大独立线控系统中,驱动方面,线控油门渗透率最高,在具备 ACC(Adaptive Cruise Control,自适应巡航控制)及 TCS(Traction Control System,牵引力控制系统)功 能的车辆上,线控油门已成为“标配”,而线控换挡的技术门槛较低,也基础实现全覆盖;制动方面,线控制动的普及率相对较低,技术门槛较高,对于实现智能驾驶的意义最为关键;转向方面,EPS(电助力转向系统)可以满足目前的智能驾驶需求,线控转向仍处于量产前夜。
我们认为,未来线控系统或将全部集成至底盘域控 制器内,以匹配更高阶的智能驾驶需求。
线控技术成为实现智能驾驶关键一环的核心原因:
一是电信号传递快于机械连接,线控可为智能驾驶提供更高级别的安全守护;
二是线控更适应高集成的发展趋 势,以实现底盘域控的目标。
一、线控制动:匹配高阶智能驾驶需求,技术更迭尚存较大空间
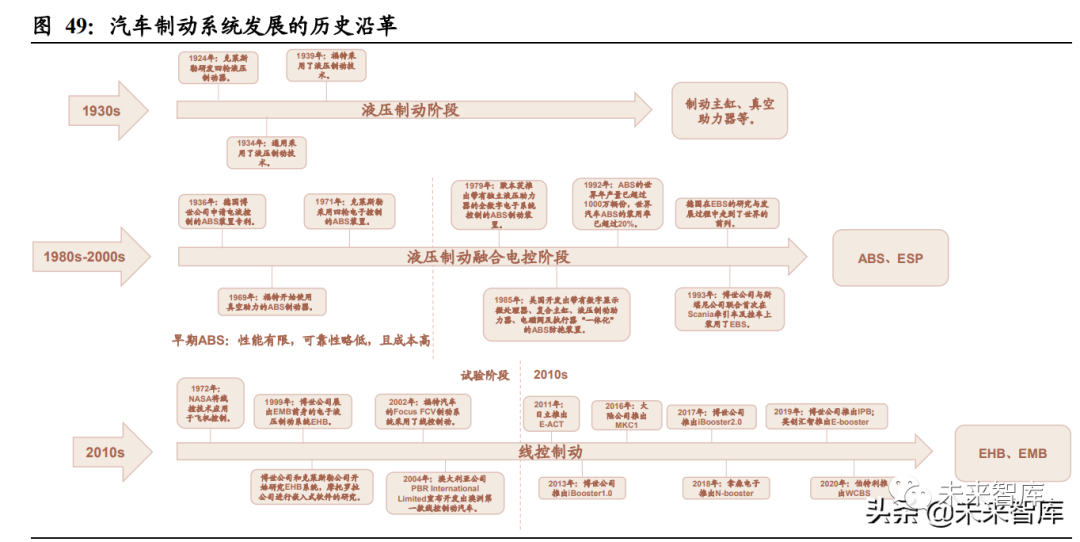
汽车制动系统的发展主要经历了“液压制动——液压制动融合电控——线控制动”三 个阶段。
未来制动系统的发展会进入第四阶段,即带冗余机制的线控制动,主要是 为适应更高水平的智能驾驶而开发。
1、为什么线控制动系统是迈向智能驾驶的关键一环?
PHEV、EV 较难支持真空助力。线控制动的初期发展主要是由于混动和纯电汽车没 有持续工作的发动机提供稳定的负压支持真空助力器。
因此,第一代的线控制动系 统采用电子真空泵解决对发动机提供负压的依赖,但是会有噪音大、高海拔情况下 效果不佳的问题,行业当下的主流产品,如博世 iBooster 已经摆脱了对于真空助力依赖。
由电子信号传递制动执行信息是实现智能驾驶的基础。
线控制动系统的制动信号可 以来自踏板,踏板行程传感器测量到输入推杆的位移后,将该位移信号发送到 ECU, 由 ECU 计算制动请求;也可以由 ECU 根据场景需要主动生成制动需求,并单独对 制动器进行控制。较传统制动系统而言,线控制动由电子信号代替机械力,无需外力介入即可实现制动。
“响应时间短+可扩展性强”为高阶智能驾驶所必须的特性。
由于电子信号传递快于 机械连接,线控可为智能驾驶提供更高级别的安全守护。
对比来看,传统制动系统 响应时间为 300~500 毫秒,博世 ibooster 的响应时间为 120~150 毫秒,布雷博的线 控制动系统响应时间可以做到 90 毫秒,与此对应的是线控制动的距离相应缩短。
高阶智能驾驶对于制动系统的响应速度要求更为严苛,更短的制动响应时间是支撑汽 车走向高阶智能驾驶的关键参数;“可扩展性强”主要体现为可以通过程序赋予线控 制动系统更多功能。
具体来看:
(1)线控制动有备用制动系统,可提供冗余功能。
L4 级智能驾驶必须具备电子冗余,不能单纯依靠机械冗余。冗余备份将是智能驾驶的 基石,制动系统中任一系统失效,备份方紧急启动,根据需求主动制动,保证智能 驾驶过程中车辆的稳定、人员的安全;
(2)可实现自动驻车、陡坡缓降和坡道起步辅 助等附加功能,且性能更好更稳定。
“集成度高+能量回收+定制化刹车系统”对于新能源汽车意义颇深。线控制动系统集成度较高,整体结构紧凑,体积小自重轻。
由于以液压助力取代了真空助力器及真空泵,线控制动的能耗较小,可以提升新能车续航里程。
线控制动可以搭配制动能量回收系统,显著提高制动能量回收率,大幅增加新能车续航里程。
值得一提的是, 线控制动系统可以实现制动解耦,与非解耦式解决方案相比,解耦式方案的制动需 求可以进行自定义,即制动力可以在电机制动(能量回收)和液压制动(能量损耗) 间进行分配。
在实际驾驶体验中,非解耦式方案会在驾驶员松开油门踏板时就进行能量回收,其劣势在于这种能量回收力度波动性较大,影响驾驶舒适度,增大安全隐患;而解耦式方案下,当驾驶员松开油门时,车辆并不会大幅减速,只有踩了制动踏板,才有能量回收,其安全性更高,即该种方案可以保证在产生制动需求时, 优先将能量回收作为主要制动力提供者,液压作为制动力补充者,从而提高电机制 动的占比,进而提升能量回收效率。
定制化刹车方面,线控制动系统取消了踏板与轮胎的物理连接,能根据路面的附着情况和车轮转速,通过电子决策系统对四轮进行制动力的精准控制,从而可以更为充分地利用车轮和地面间的摩擦力,缩短制动距离。
2、为什么 EMB 是最理想的线控制动技术,但当下以 EHB 替代为主?
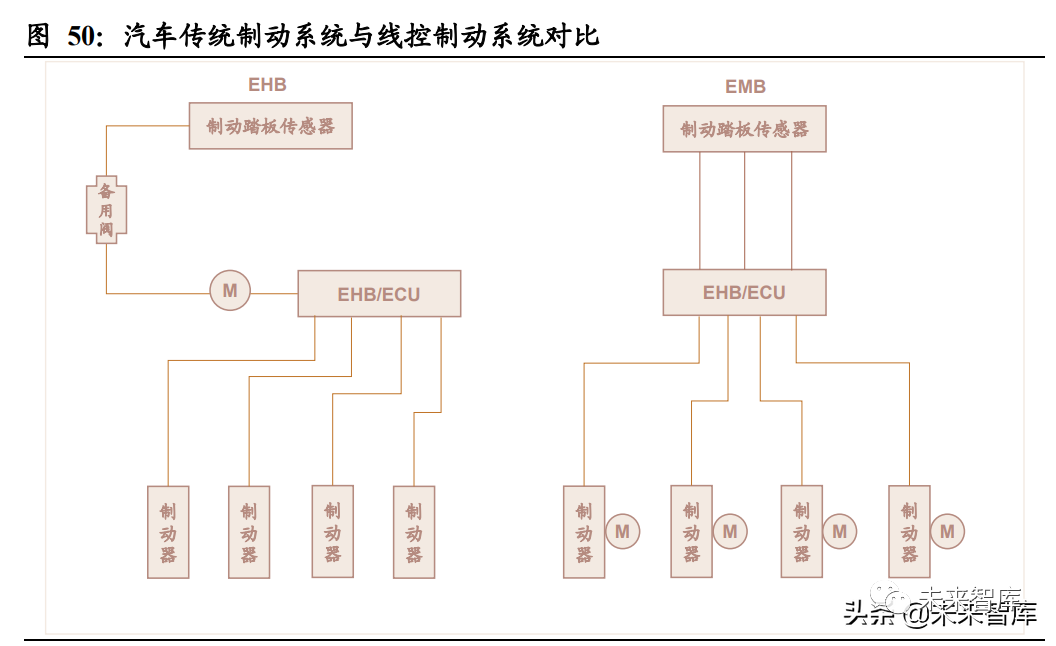
线控制动系统主要包含:
非纯线控的液压式线控制动(Electro-Hydraulic Brake, EHB)以及纯线控的机械式线控制动(Electro-Mechanical Brake, EMB)两种。
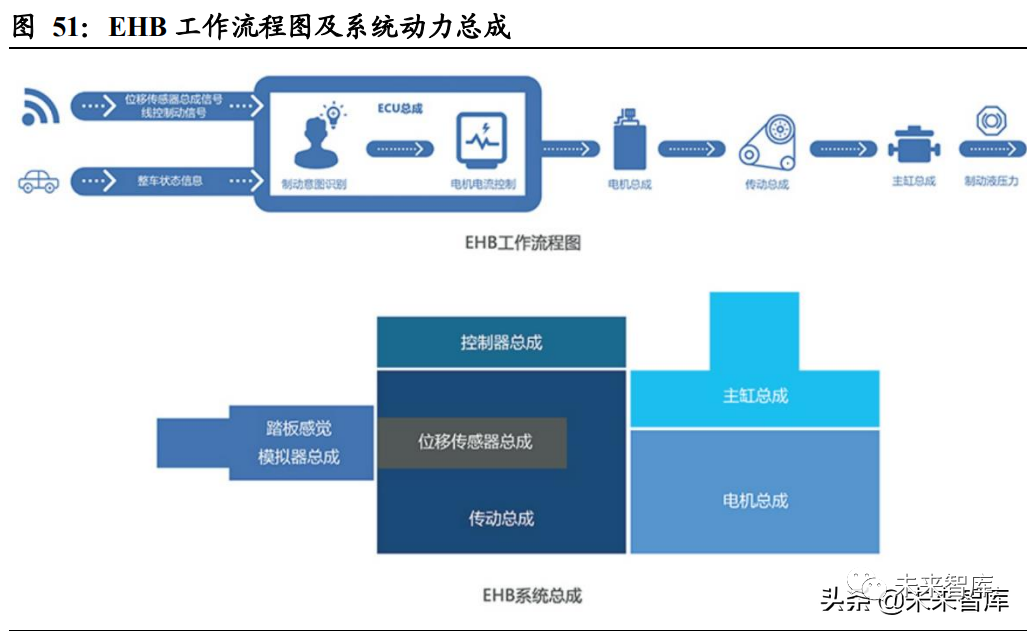
对比来看,EHB 保留传统的液压工作方式,由 ECU 计算出电机应产生的扭矩,二级齿轮传动装置将该扭矩转化为助力器阀体的伺服制动力,通过电机转化为强大的直 线推力,推动制动主缸推杆;EMB 直接取消了制动主缸和液压管路,将电机集成在 制动钳上,制动信号直接输入到制动钳。
完全电子化下整合性及响应速度更为精进,成本较高成为应用推广掣肘。
EMB 取消 了液压系统,符合汽车电子化潮流,更易与汽车电控系统进行整合,其主要优点体 现为响应时间短(约为 90 毫秒),整体设计构造较简单,体积及自重较小。
EMB 当下面临的主要技术难题包括:
(1)无冗余系统,需要解决电路、电源、模拟器无法正 常工作下的意外状况、
(2)制动功能高度集成化后的算法优先级设置、
(3)制动能量回 收系统与制动系统之间交错的识别问题等。
整体来看,EMB 方案需要大量传感器及 控制芯片支持,当前的成本较高,且技术层面还有待突破,而 EHB 方案可以认为是 一种折中方案,用电子器件取代了部分机械部件,EHB 与冗余方案均失效时,仍可变为无助力液压制动,安全性较高、成本较低且技术相对成熟。
3、为什么 EHB 的 One-box 方案会成为主流趋势?
定义 One-box 和 Two-box 方案的标准在于 AEB(自动紧急制动)/ESP(电子稳定) 系统是否和电子助力器集成在一起。
在 Two-box 方案下,作为冗余的 ESP 和电子助 力器是相互独立的,而在 One-box 下,电子助力器本身就集成了 ESP。
One-box 方 案由于技术问题量产时间较晚,当前主流产品为博世最新一代 IPB、大陆 MK C1、 伯特利 WCBS。
基于 One-box 方案集成度更高、体积小及重量轻、能量回收效率更高且成本更低(博世的 IPB 比 ibooster+ESP 便宜 300 元左右),我们认为 One-box 方案是行业未来的主流趋势。
需要指出的是,One-box 方案需要踏板解耦,由于踏板仅用于输入信号,不作用于主缸,而由传感器感受踏板力度带动电机推动活塞,踏 板感受需要软件调教,可能伴随安全隐患。
二、线控转向:行业仍处量产前夜,传统 Tier 1 优势较难撼动
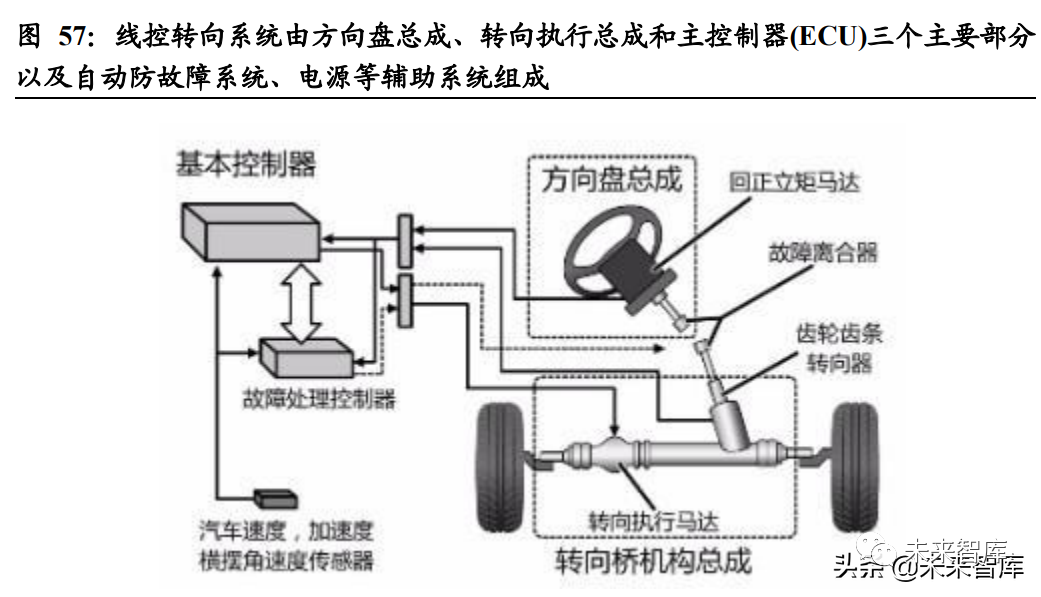
与汽车制动系统类似,转向系统也经历了“机械式——电子辅助式——线控式”的发展历程,线控转向系统(SBW)在电子助力转向系统(EPS)的基础之上发展而来, 将驾驶员的操纵输入转化为电信号,无需通过机械连接装置,转向时方向盘上的阻 力矩也由电机模拟产生,可以自由地设计转向系统的角传递特性和力传递特性,完 全实现由电线或者电信号实现指令传递从而操纵汽车。
整体来看,线控转向系统取消了转向盘与转向轮之间的机械连接,完全由电信号实现转向的信息传递和控制, 呈现操作更灵敏、结构更可靠和功率消耗更低的特性。
1、SBW 对于智能驾驶的意义是什么?
与 EPS 相比,SBW 的最大不同是取消了方向盘和转向轮之间的物理连接,它的转向力矩完全依靠下转向执行器来输出,而下转向执行器输出力的方向和大小依赖于 控制算法给定的控制信号。
算法可以依赖方向盘的输入信号,也可以脱离方向盘, 根据智能驾驶的转向要求而独立转向。
整体来看,相比于线控制动,线控转向对于 智能驾驶的性能提升有限,叠加线控转向系统的较高成本,EPS 仍是当前智能驾驶 的主流解决方案。
2、制约 SBW 大面积推广应用的原因是什么?
SBW 的渗透率仍位于低位的核心原因在于其较高的成本。
为了保证可靠性和模拟路感,线控转向必须设计机械冗余系统或者电气冗余系统,以及路面信息回馈系统, 这会带来额外成本。
目前 EPS 单车价值量约为 1,500 元,而线控转向系统则为 3,000~4,000 元。
3、未来的市场格局将如何演绎?
国内的线控转向行业仍处于萌芽期,头部玩家的线控转向产品已完成技术积累,具备线控转向的量产能力,但尚未进入量产阶段,如博世、捷太格特、耐世特等公司 均已完成了所有研发和测试过程。
我们认为,线控转向系统与 EPS 系统存在诸多技 术共通点,传统的 Tier 1 EPS 供应商具备较为深厚的技术积累,在线控转向系统的 技术研发上占据先发优势,预计短期内市场仍将呈现为类似传统 EPS 行业的高集中 度竞争格局。
-END-