


《APM32芯得》系列内容为用户使用APM32系列产品的经验总结,均转载自21ic论坛极海半导体专区,全文未作任何修改,未经原文作者授权禁止转载。
1. 认识MicroPython
说起Python,大家都知道这门语言,它是一款非常容易上手的脚本语言。它凭借其丰富的扩展库,具有非常强大的功能,同时它的语法简单而优雅,应用非常广泛。
而MicroPython,就是Micro + Python 的意思,也就是说是 Python 的精简版。它是专门针对微控制器这种资源有限的设备(降低了RAM和ROM的占用),通过Python3 版本进行优化和裁剪之后的精简版,可以看成是 Python 标准库的一个子集。
借助 MicroPython ,我们完全可以通过 Python 这种脚本语言,实现硬件底层的访问和控制,而不用去了解底层寄存器、数据手册、SoC厂的库函数等,就可以轻松的控制硬件,比如 LED灯、LCD显示、读取电压、读取按键等。
下面是MicroPython的中文社区:
https://www.micropython.org.cn/forum/
2. RT-Thread上的MicroPython
如果手上没有MicroPython官方支持固件的开发板,那么就需要自己来动手制作MicroPython固件了。
但是RT-Thread官方,基于他们的RT-Thread系统上,移植了MicroPython,所以只要是支持了RT-Thread系统的SoC厂商,都可以在搭载了RT-Thread的嵌入式设备上运行MicroPython。并且 MicroPython 底层和硬件绑定时对接了 RT-Thread 驱动框架,通过RT-Thread MicroPython可以很容易的实现对硬件的访问和控制。
注意:RT-Thread MicroPython需要运行在 RT-Thread 3.0 以上的版本。
RT-Thread MicroPython软件包可以去他们的github仓库下载,如下:
https://github.com/RT-Thread-packages/micropython
2.1 支持的硬件模块
根据 RT-Thread 官网的介绍,目前实现的控制模块有:
硬件控制模块:
Pin
I2C
SPI
UART
LCD
RTC
PWM
ADC
WDT
TIMER
网络功能配置模块:
wlan
更多的 RT-Thread MicroPython 介绍可以到他们官方的文档中心了解:
https://www.rt-thread.org/document/site/#/
2.2 占用资源
RT-Thread MicroPython mini 版本占用资源最大不超过:
ROM : 190KB
RAM : 20KB
只要是满足上述要求MCU,都可以运行RT-Thread MicroPython 。
3. 使用RT-Thread MicroPython
3.1 准备
1、RT-Thread源码
2、env使用工具
在使用 RT-Thread MicroPython 之前,首先需要去他们github仓库,把RT-Thread的完整版源码下载下来。
https://github.com/RT-Thread/rt-thread
而且还需要下载他们的env使用工具,具体可以到RT-Thread的文档中心了解。
3.2 使用RT-Thread MicroPython软件包
下面以 apm32f407zg-evalboard 的 BSP 包,讲解如何在RT-Thread上开启MicroPython。
3.2.1 打开 RT-Thread MicroPython 软件包
在 apm32f407zg-evalboard bsp包中,打开env环境,然后输入 menuconfig 命令。然后逐级找到 MicroPython 。

选中 MicroPython 之后,输入 y 选择该软件包。然后按下回车键进入详细的配置界面。
3.2.2 配置MicroPython运行时的堆栈大小
上面说过运行 RT-Thread MicroPython 至少需要 20KB 的堆栈,所以这里我们设置为 20KB 大小。
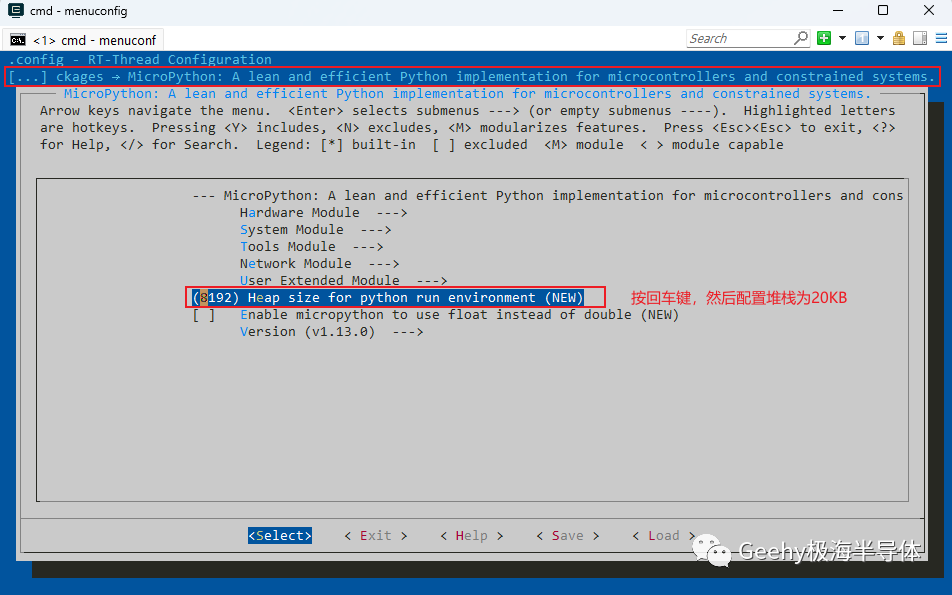
选择 MicroPython 的配置界面,初次配置先分配20KB的堆栈给 MicroPython 运行,如果后续需要运行更多的 Python 代码,可以重新分配。
3.2.3 配置shell线程的堆栈大小
由于我本次的示例,是准备把 MicroPython 通过 RT-Thread 的 shell 命令行输入命令进行启动,所以需要增大 shell 线程的堆栈大小。如果你是直接写代码,通过main线程启动 MicroPython ,那么同样的也需要增大 main 线程的堆栈。

把 shell 线程的堆栈增大到 8KB 。
3.3 在线获取RT-Thread MicroPython和更新mdk工程配置
配置完上面的操作之后,就可以保存退出了。
1、然后先通过 pkgs --update 命令,把 RT-Thread MicroPython 软件包拉取到本地。
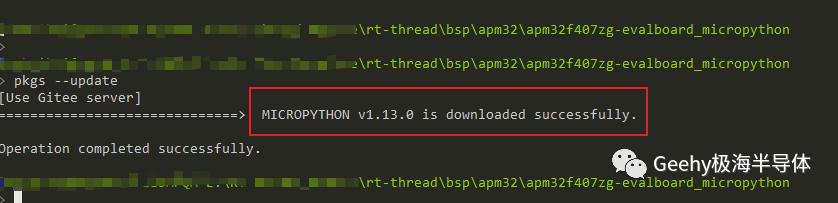
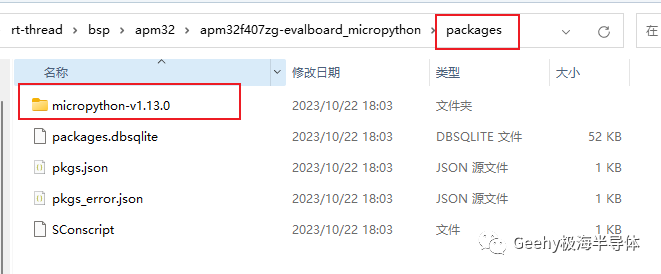
拉取完之后,可以到自己使用的bsp包目录下检查是否多了 .\packages\micropython-v1.13.0 这个目录。如下:
2、然后在 env 命令行中输入 scons --target=mdk5 命令,重新生成mdk5的工程。

3.4 编译报错问题解决
上面已经配置生成了 mdk5 的工程,我们通过keil打开该工程,然后编译出现了很多错误和警告,如下:

这些警告大多数都是 MicroPython 一些数据类型不匹配造成的,警告我这里暂时先不去管了,先把错误解决了。
出现的错误,原因就是因为 RT-Thread 系统进入了 5.0 以上的版本之后,它改了很多内容,但是和它适配的一些软件包,可能官方还没来得及改,所以就出现了这些报错,不过没关系,我们自己检查一些更改即可。
3.4.1 RT_WEAK 宏定义更改为小写 rt_weak
首先是 RT_WEAK 这个宏定义,现在的 5.0 意思版本,好像是被更改为了 小写,所以关于 RT-Thread MicroPython 源码的 RT_WEAK ,都需要更改为小写 rt_weak 。


RT_WEAK 的错误是上面两处。
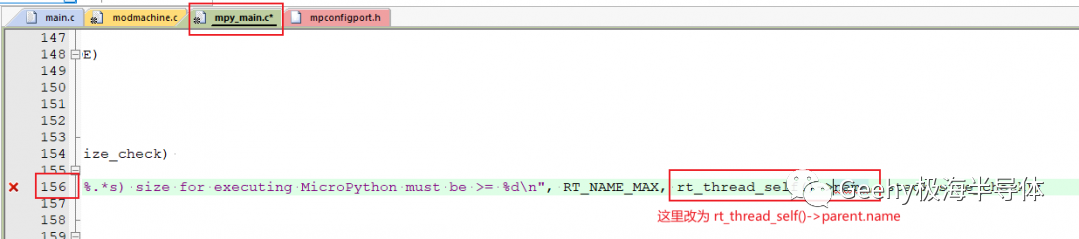
3.4.2 mpy_main.c 文件的 rt_thread_self()->name 需要改为 rt_thread_self()->parent.name
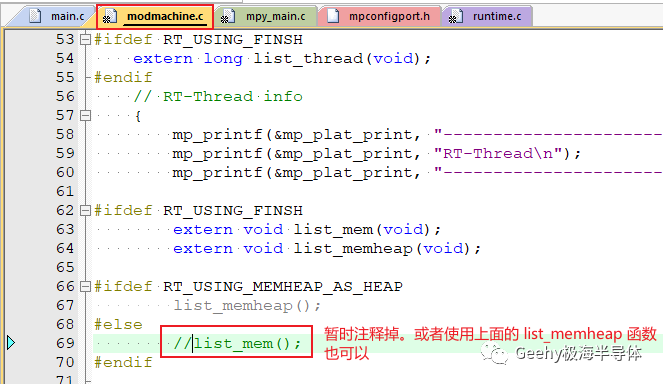
3.4.3 list_mem 函数没有定义的链接错误

关于 list_mem 这个函数本来在 4.0 几的版本,是在RT-Thread 源码的 mem.c 文件定义的,现在它升级到了 5.0 以上的版本,不知道为什么又没有这个函数了。
这个函数的主要作用其实就是列出当前系统的内存使用情况,现在新的RT-Thread系统,去掉了这个函数。那么没办法,我们暂时先注释掉这个函数,或者开启 RT_USING_MEMHEAP_AS_HEAP 这个宏定义,然后使用 list_memheap 这个函数也可以。
下面我暂时先注释掉这个函数。
最后,就可以编译通过了,如下:

还有很多的警告,这个是因为 MicroPython 的源码,很多数据类型说不匹配,这个我没有研究怎么才能去掉这些警告。
3.5 MicroPython 简单使用
把上面编译好的源码,下载到 APM32F407-EVAL 的开发板,然后可以在串口终端看到如下的输出信息,输入 help 命令,可以看到系统上已经有了 python 可以使用了。
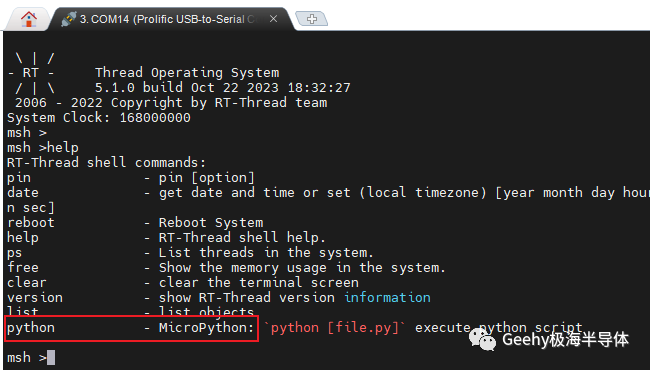
输入 python 命令,然后就可以在 python 下面进行编程了。

可以看到,能够执行一些Python的运算了,说明以及成功把 MicroPython 在 APM32F407 运行起来了。
4. MicroPython控制硬件示例
关于 RT-Thread MicroPython 目前支持哪些硬件外设的控制,以及这些硬件模块都有哪些 Python 函数接口,怎么使用这些接口等等,都可以去RT-Thread 的文档中心中查阅。
下面我就使用 Pin 模块介绍下如何实现 LED 的控制,以及如何读取按键的电平。
4.1 Pin模块接口介绍
1、Pin构造函数定义
class machine.Pin( id, mode = -1, pull = -1,value);
函数参数:
id :由用户自定义的引脚名和 Pin设备引脚号组成,如 ("PB15", 31),"PB15" 为用户自定义的引脚名,31 为 RT-Thread Pin 设备驱动在本次移植中的引脚号。
mode :指定引脚模式,可以是以下几种:
pull :如果指定的引脚连接了上拉下拉电阻,那么可以配置成下面的状态:
value :value 的值只对输出模式和开漏输出模式有效,用来设置初始输出值。
比如说,我定义一个 LED 的 Pin对象,那么代码如下:
led = Pin(("led_red", pin_num("PE4")), Pin.OUT_PP)
ed_red 是你自己自定义的名称,然后 pin_num("PE4") 这个,是RT-Thread的引脚号,对于APM32F407 来说 PA0 引脚号是0,PB15引脚号就是31。Pin.OUT_PP 是输出模式,其他两个参数不需要就可以不指定。
2、Pin模块提供的方法:
方法 | 作用 |
Pin.init(mode= -1, pull= -1, *, value, drive, alt) | 根据输入的参数重新初始化引脚 |
Pin.value([x]) | 输出高低电平。如果没有给定参数,那么该方法可以获取引脚电平。 |
Pin.name() | 返回引脚对象在构造时用户自定义的引脚名 |
Pin.irq(handler=None, trigger=(Pin.IRQ_RISING)) | 配置在引脚的触发源处于活动状态时调用的中断处理程序 |
4.2 控制LED示例
上面简单介绍了下 Pin 模块的使用,下面我们用该模块控制 LED 闪烁示例。
LED 闪烁的 Python 代码如下:
import utime as time
from machine import Pin
# 获取引脚号,比如 PA0 引脚号为 0,PB15 引脚号为 31
def pin_num(pin_index):
return (ord(pin_index[1]) - ord('A')) * 16 + int(pin_index[2:])
# 构造 led 对象
led = Pin(("led_red", pin_num("PE4")), Pin.OUT_PP)
while True:
led.value(0) # Set led turn on
time.sleep(0.5)
led.value(1) # Set led turn off
time.sleep(0.5)
我们在串口终端中启动 Python ,然后把上面的代码复制到 Python 中运行。
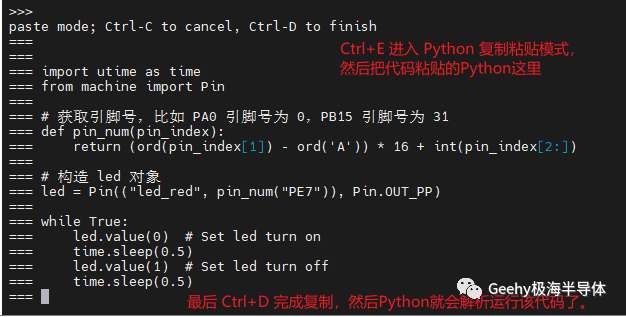
MicroPython会解析并运行上述代码,然后可以看到对应的 LED 灯在闪烁了。
4.3 读取按键
上面已经使用 Pin 模块,输出电平控制 LED 了。下面是 Pin 模块读取按键输入的电平,Python 代码如下:
from machine import Pin
import utime as time
# 获取引脚号,比如 PA0 引脚号为 0,PB15 引脚号为 31
def pin_num(pin_index):
return (ord(pin_index[1]) - ord('A')) * 16 + int(pin_index[2:])
# 构造 LED 和 KEY 对象
led = Pin(("led_red", pin_num("PE4")), Pin.OUT_PP)
key_0 = Pin(("key_0", pin_num("PF9")), Pin.IN, Pin.PULL_UP)
while True:
if key_0.value() == 0:
led.value(0)
print("key_0 is pressed")
time.sleep(0.5)
else:
led.value(1)
同样,把上述代码复制到 Python 解析器上面运行,当按下按键的时候,就可以看到LED点亮了,而且在终端中输出按下的信息。

上面就是Pin模块的使用示例。
另外,如果我们想要把写好的代码,作为一个 Python 文件,让 MicroPython 去执行,那么需要把文件系统加入 MicroPython 中,具体可以看 RT-Thread 文档中心的介绍。
注:文章作者在原帖中提供了工程文件,有需要请至原文21ic论坛下载
原文地址:https://bbs.21ic.com/icview-3334974-1-1.html
或点击下方 阅读原文 跳转


 0756 6299999
0756 6299999
info@geehy.com

www.geehy.com
广东省珠海市香洲区广湾街83号01栋
