

前言
SMU模块是Aurix芯片自带的一个功能安全硬件模块,它能够收集其他模块(PMS, MTU, SCU, CCU, e.g.)由于硬件功能安全机制产生的报警(Alarm),然后,SMU模块通过用户配置能够产生内部或者外部的动作/响应,也可以不产生任何动作。本文将详细介绍SMU模块。
目录
缩略词
简写 | 全称 |
SMU | Safety Management Unit |
FSP | Fault Signaling Protocol |
SCU | System Control Unit |
IR | Interrupt Router |
注:本文章引用了一些第三方工具和文档,若有侵权,请联系作者删除!
正文
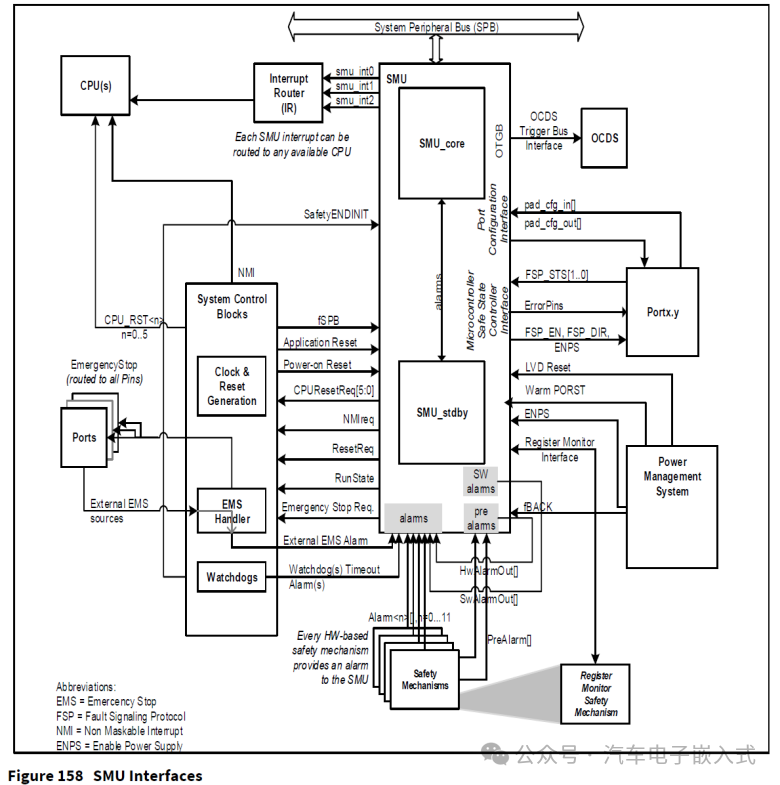
SMU 是安全架构的核心组件,提供通用接口,用于管理存在故障的微控制器的行为。SMU 集中所有与不同的硬件和软件安全机制相关的警报信号。每个警报都可以单独配置为触发内部操作和 / 或通过故障信号协议(FSP, Fault Signaling Protocol)向外部通知存在故障。 每一报警的严重程度应根据安全应用的需要进行配置:默认情况下,除看门狗超时报警外,每一报警反应都被禁用。 为了进行调试和诊断,报警信号设置了一个粘滞位(sticky bit),该粘滞位可适应应用程序或系统重置。 SMU 还实施了一些与专用安全机制的管理和测试相关的内务管理(housekeeping functions)功能。 可以使用特殊测试模式测试 SMU 本身,以检测潜在故障。除了寄存器访问保护外, SMU 还实施了配置锁定机制(configuration locking mechanism)。 此外,为了缓解(mitigate)潜在的常见原因故障, SMU 分为两部分:
. SMU_core: 位于core domain.
. SMU_stdby: 位于stand-by domain.
SMU_CORE 和 SMU_Stdby 的设计方式和时间安排各不相同。SMU 的两个部分之间存在物理隔离。它们位于不同的时钟和电源域中。这允许 SMU 处理任何传入的报警,而不管用于生成此报警的时钟频率如何。此外,在 fSPB (或衍生产品) 上生成的报警事件将由 SMU_CORE 处理,而在 fBACK 上生成的报警事件将由 SMU_Stdby 处理。这样,所有时钟活动监视器警报都将在生成时钟域中处理。此外,与功率和温度有关的报警也以不同的方式处理,因为它们由 SMU_CORE 和 SMU_Stdby 处理。可以在 SMU_CORE 或 SMU_Stdby 中配置对这些报警的一个或多个反应(Actions)。
此外,为了检测 SMU_CORE 中的错误,将从 SMU_core 向 SMU_Stdby 发送警报 SMU_core_alive。对这些警报的反应(Actions)可在两个域中配置。 但是,对于 SMU_Stdby ,只有无反应(no reaction)或将 Errorpins 配置为高阻抗状态作为报警反应。
SMU 与嵌入式安全机制相结合,可以在容错时间间隔内检测并报告超过 99% 的微控制器严重故障模式。可在 SMU 中配置容错时间间隔的计时特性。
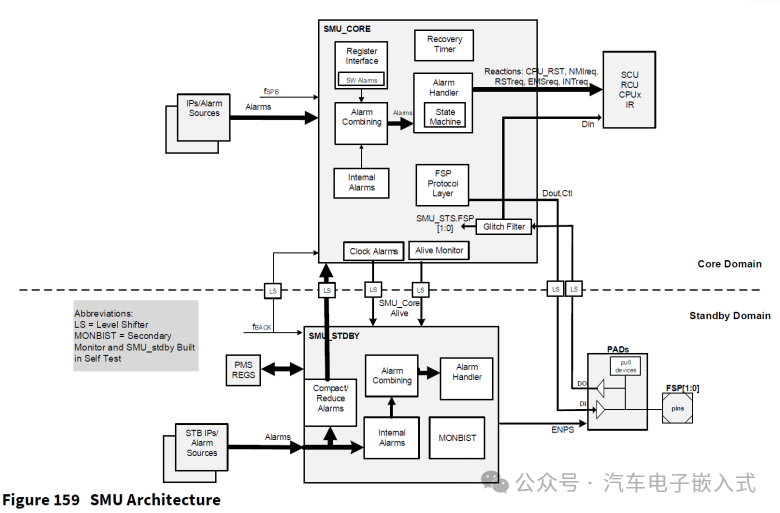
核心域 SMU (也称为 SMU_core) 从安全概念定义的硬件监视器(hardware monitors)的安全机制收集大多数警报信号。 报警映射(Alarm Mapping)部分(后面的章节)指定报警接口(alarm interface)并将其分类为报警组(alarm group)。 报警组定义逻辑映射,用于将报警信号映射到内部状态寄存器。 “报警处理”部分描述了配置选项。配置选项指定检测到报警事件时 SMU_core的行为。警报事件可以触发内部操作和 / 或激活错误针脚,以指示外部环境存在故障。SMU_CORE Control Interface 部分指定了软件如何控制 SMU_CORE 以及硬件操作的相关性。故障信号协议 (FSP) 部分描述了外部故障信号协议的属性,这些属性定义了错误针脚(ErrorPin)的计时和逻辑属性。
备用域 SMU (也称为 SMU_Stdby) 从检测时钟 (无时钟) ,电源 (电压过低 / 过高) 和温度故障 (温度过低 / 过高) 的模块收集警报。SMU_Stdby 还会收集 SMU_Alive 报警信号,当 SMU_CORE 在报警升高后未触发反应时,该信号会发出通知。此外, SMU_Stdby 实现了内置自检功能,允许用户测试 SMU_Stdby 对报警信号的反应以及从次级电压监视器到 SMU_Stdby 的完整报警路径。有关辅助监视器和 SMU_Stdby 内置自检的详细信息,请参阅电源管理系统一章。
“报警映射”部分指定报警接口,并将它们分为两个报警组。“报警处理”部分描述了可以指定的配置选项。配置选项指定检测到报警事件时 SMU_Stdby 的行为。警报事件可以触发启动 ErrorPins (错误针脚) ,该 ErrorPins (错误针脚) 表示外部环境存在故障。
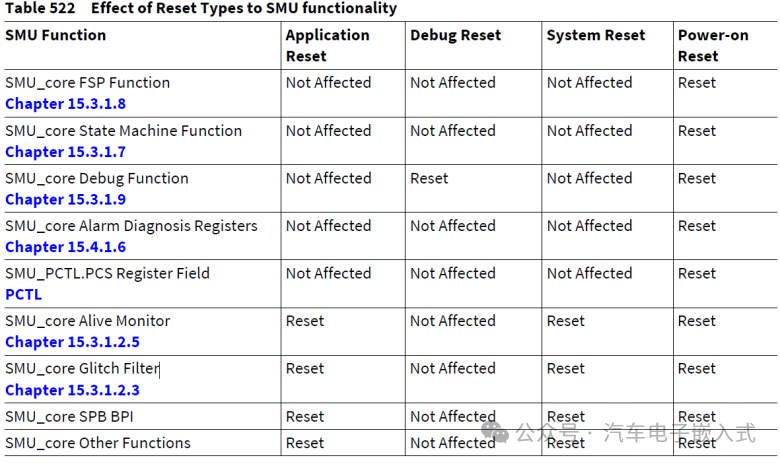
SMU_CORE 需要多种Reset类型。 Reset类型在系统控制单元中完全指定。 SMU_CORE 要求的重置类型为:
. Power-on Reset
. System Reset
. Debug Reset
. Application Reset
下表指定了每个重置(Reset)类型的范围,这些重置类型的配置和逻辑是SMU_core 控的。
这一章描述SMU_core和其他模块之间的接口信号。
与系统控制单元连接的警报事件所导致的内部操作。 接口信号为:
. Emergency Stop Request
. Reset Request
. NMI Request
. CPU Reset Request
与中断路由模块相连的报警事件导致的内部操作。 接口信号为:
. SMU Interrupt Service Request 0
. SMU Interrupt Service Request 1
. SMU Interrupt Service Request 2
SMU 中断服务请求到中断路由 (IR) 中断节点的映射可在中断路由器一章 (SRC_SMUy, y=0.2) 中找到。

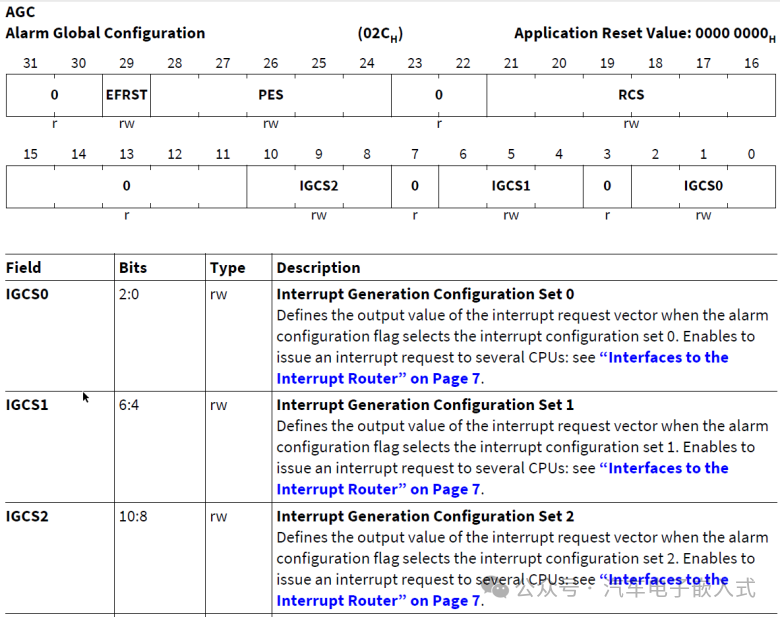
AGC.IGCSx , x= { 0 , 1 , 2 } 寄存器字段提供了软件接口来控制 SMU 如何触发中断路由器的中断请求。
每个AGC.IGCSx是一个3-bits的位域信号:
. AGC.IGCSx[0] shall be set to ‘1’ to trigger SMU Interrupt Service Request 0
. AGC.IGCSx[1] shall be set to ‘1’ to trigger SMU Interrupt Service Request 1
. AGC.IGCSx[2] shall be set to ‘1’ to trigger SMU Interrupt Service Request 2
AGC.IGCSx的使用在Alarm Configuration章节描述。
通用端口结构如下图所示。
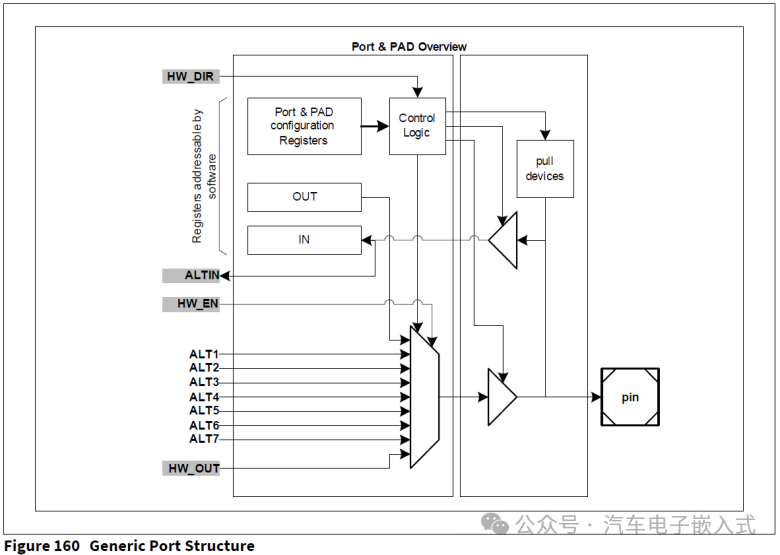
端口引脚(Port Pin)可以通过 ALTx 输出线路连接到外围设备。这是开机重置后端口的默认状态 。SMU_CORE 使用 HW_DIR , AlTIN , HW_EN , HW_OUT 信号连接到端口。当 HW_EN 端口输入由 SMU_CORE 驱动时, SMU_CORE 将完全控制该端口,绕过与 ALTx 输入使用相关的任何其他软件配置。
下图 提供了端口结构的更详细概述,并突出显示了 SMU_CORE 连接中涉及的信号。
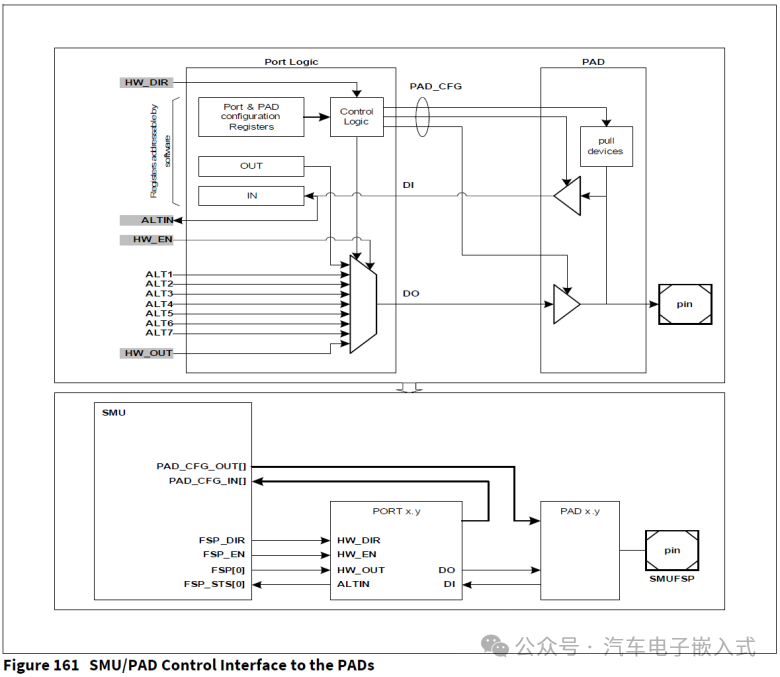
SMU_FSP0(也就是上图中的FSP [0]) 由硬件控制。FSP_DIR和FSP_EN由软件控制,控制寄存器如下:
. PCTL.HWDIR直接驱动FSP_DIR输出。
. PCTL.HWEN直接驱动FSP_EN输出。
PCTL.HWDIR 和PCTL.HWEN同时也会控制SMU_FSP1.
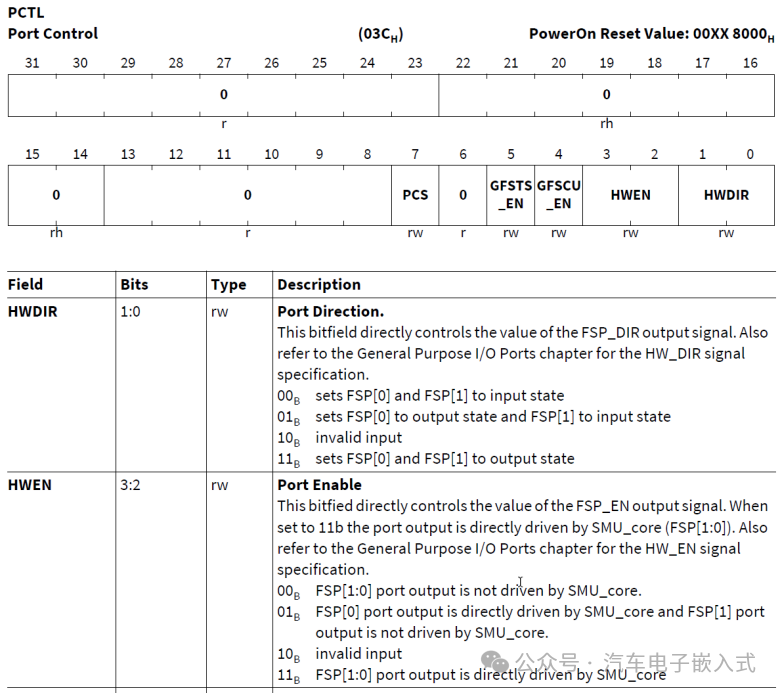
PCTL. PCS 位域 ,与 P33_PCSR.SEL 位字段配合使用,使软件能够更改 FSP [0] 的 PAD 控制。借助 P33_PCSR. SEL , PCTL HWDIR , HWEN 和 PCS 字段,软件可以控制 FPSP [0] PAD 所有权从 GPIO 过渡到 SMU 硬件完全控制。
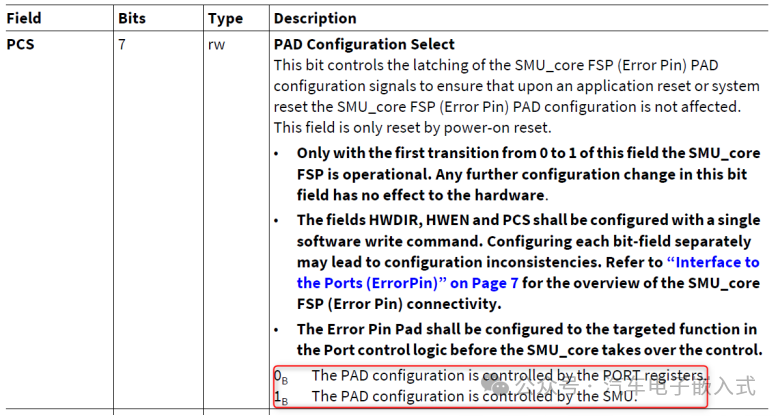
SMU_FSP1 PAD 不在 SMU_CORE 的控制下。通过软件配置PCTL PCS 字段,不能更改 SMU_FSP1 的 PAD 控制。但是, PCTL HWDIR 和 HWEN 字段可用于超控(overrule) PAD 配置。
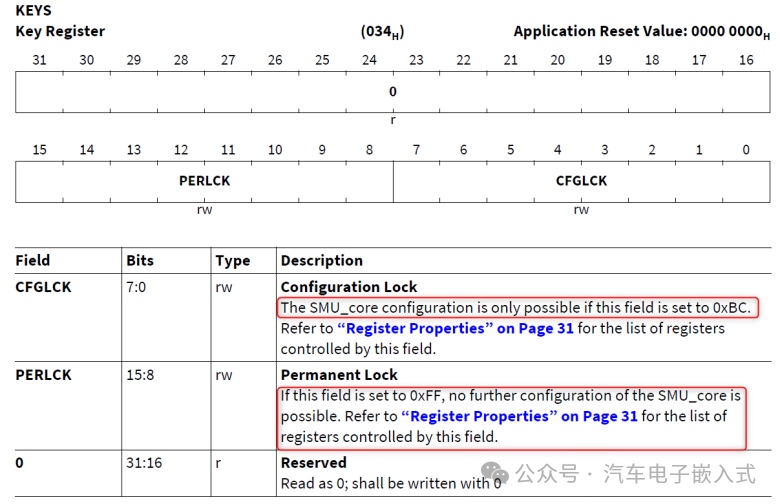
PCTL 寄存器的内容被KEYS寄存器锁定,并且只能通过开机重置(power-on reset)进行重置,因此即使存在应用程序或系统重置, PAD 配置也将保持不变。此外, PCTL 寄存器使用安全触发器安全机制实施,该机制在运行时检测随机硬件故障引起的任何位变化。
参考SMU_core Integration Guidelines章节,描述了使用ErrorPin时的SMU和PORT模块的配置步骤。
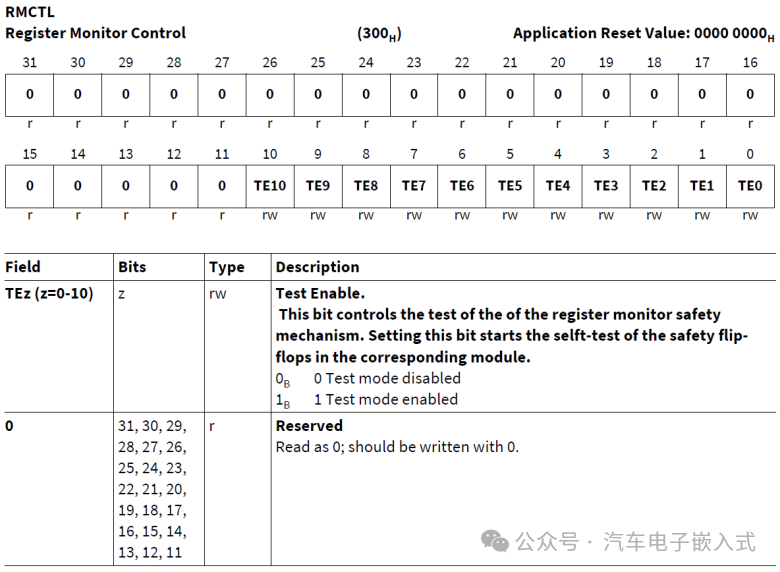
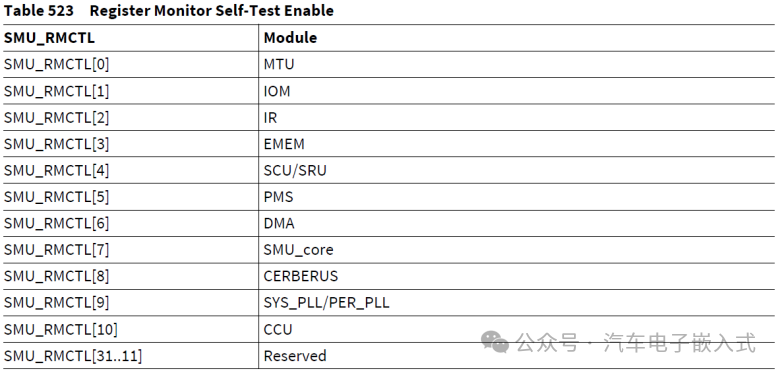
寄存器监视器控制 (RMCTL) ,寄存器监视器错误标志寄存器 (RMEF) 和寄存器监视器自检状态寄存器 (RMSTS) 之间的接口指定如下:
RMCTL.TE[31:0]
-将 RMCTL.TE[i] 设置为 1 将对给定模块的安全触发保护寄存器启动自检 (请参阅表 523) 。
-在自检结束时,必须将这些位设置回 0.
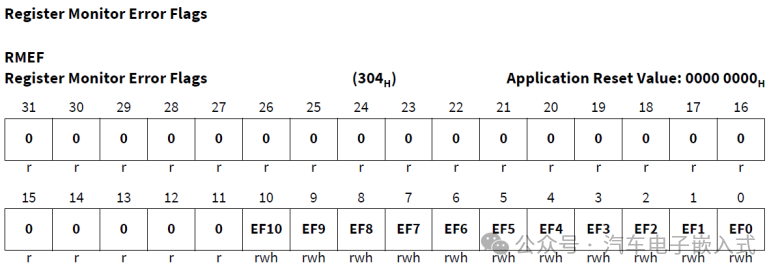
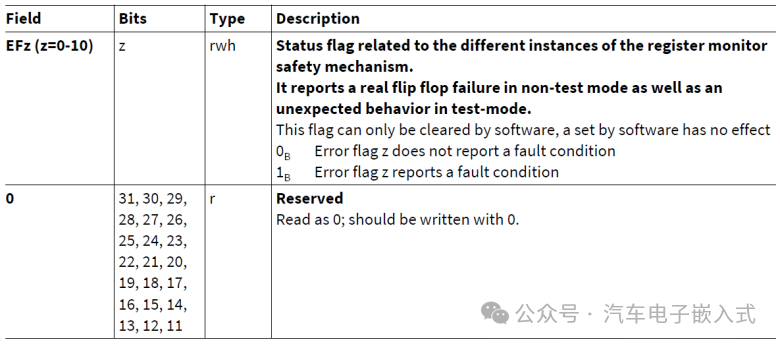
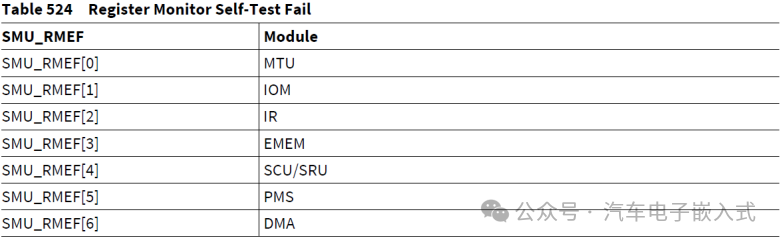
RMEF.EF [31:0]
-无论 RMTL.TE[i] 的状态如何,只要在给定模块的安全触发保护寄存器中检测到故障, RMEF.EF[i] 就会设置为 1 (参见表 524) 。
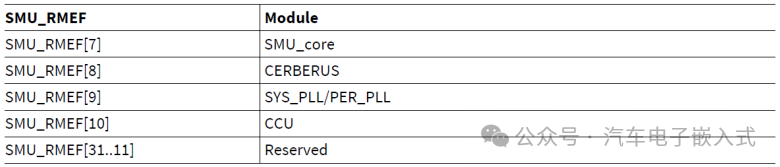
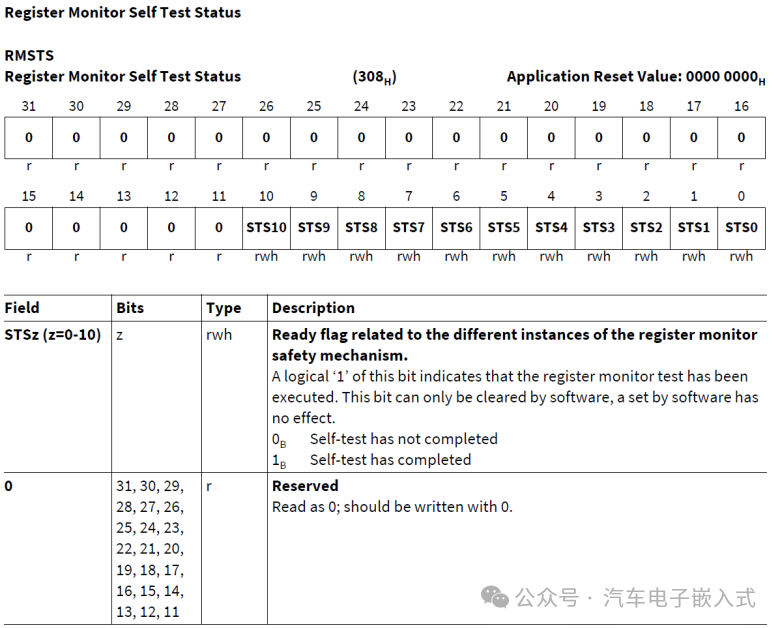
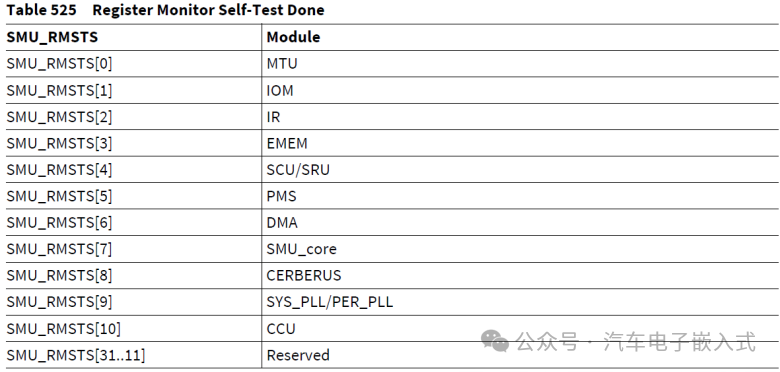
RMSTS.STS [31:0]
-RMSTS.STS[i] 在安全触发自检序列结束时设置为 1 (参见表 525)
安全触发器自检条件
为了防止自检期间出现意外行为,应满足以下条件:
•必须启用要测试的模块的时钟
•自检期间不得修改自检所涉及模块的时钟和时钟比率
•自检序列中所涉及模块的时钟比率应以特定方式设置。有关更多详细信息,请参阅安全触发相关章节
•执行自检时,微控制器不应设置为重置,休眠或调试状态
如果发生故障, SMU_CORE 会向 SMU_Stdby 生成信号 SMU_core_alive。
如果满足以下条件之一,将生成 SMU_core_alive 信号:
•当 SMU_CORE 处于运行(RUN)或故障(FAULT)状态,且 SMU_CORE 活动监视器 (SCAM) 检测到 SMU_CORE 未生成反应时,会发生警报事件。
•当 SMU_CORE 处于启动(START)状态,且SCAM检测到 SMU_CORE 未生成响应时,会发生监视程序或恢复计时器警报事件。
•发送 SMU_ActivateFSP 或 SMU_ActivatePES 命令,但 SMU_CORE 不会生成相应的响应
•在处理此报警时,报警的配置会发生变化
SMU_core_alive 信号可以通过发送 SMU_AliveTest 命令来测试。
事实上,发送 SMU_AliveTest 命令将触发SCAM引发故障并将 SMU_core_alive 警报转发给 SMU_Stdby。无论是否启用 SMU_Stdby (请参阅Interdependency Between SMU_core and SMU_stdby) ,都可以在 AG2i_STDBY (i=1) 中读取 SMU_core_Alive 报警标志。可以通过使用不同的参数发送 SMU_AliveTest 命令来禁用SCAM错误注入 (请参阅表 531)。但是,当真正的故障生成 SMU_core_alive 报警时, SMU_AliveTest 命令无法清除该报警。要清除 SMU_core_alive 警报,至少需要重置应用程序。
对于 TC39xB 和 TC38x ,当 SMU_CORE 处于启动(START)状态时,在处理“恢复计时器 1 ”超时警报时发生故障将不会生成 SMU_core_alive 警报。
本章通过提供有关错误针脚 (故障信号协议 (FSP)) 与微控制器的其他输入 / 输出 (GPIO) 功能以及故障信号协议 (FSP) 配置的更多信息,扩展了接口概述部分。
. 在power-on reset期间, ErrorPin 处于高阻态:the pull devices are disabled.
. power-on reset后, ErrorPin 连接到的端口(PORT)的默认模式为 GPIO.
. 在将 PAD 的所有权更改为 SMU 之前,软件应配置端口寄存器,包括:
-如果未使用 GPIO ,请disable the pull devices.
-通过软件编程GPIO 寄存器,将 ErrorPin强驱动输出低电平.
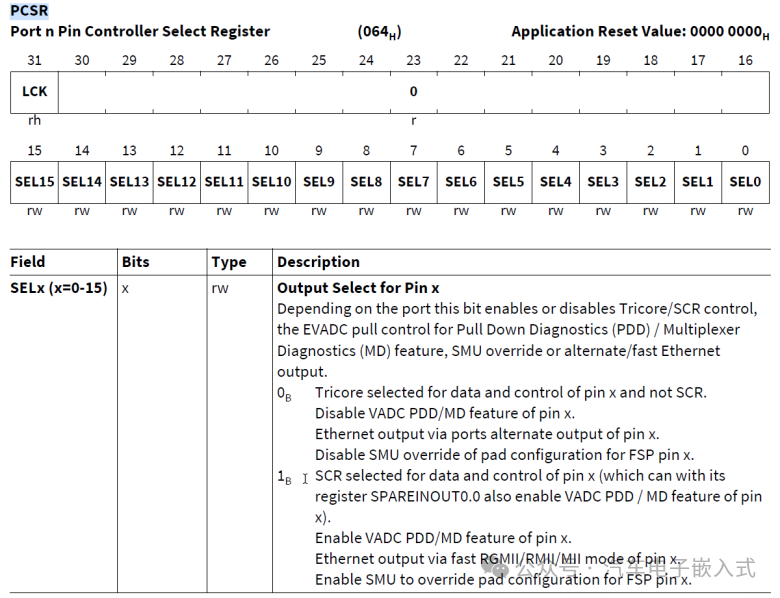
-设置P33_PCSR.SEL8为1
-设置P33_PCSR.SEL10为0.
要使 SMU 能够控制 ErrorPin PAD ,软件应激活 PAD 配置保护处理(configuration safeguarding process)。
-保护处理需要一个软件操作,包括在 PCTL.PCS 字段中写入 1。只有从 0 到 1 的第一个上升沿会使得保护处理生效。新的端口配置以及从 0 到 1 的 PCTL.PCS 的新转换对硬件没有影响。
此外,需要按照以下步骤重新配置故障信号协议 (FSP) 设置:
-当处于无故障状态(Fault Free State)且正在使用时间切换(Time Switching)或Dual Rail协议(时:
. 通过将 FSP 设置为Bi-stable协议模式 (FSP.MODE = 00B) 来禁用时间切换(Time Switching)或Dual Rail协议
. 等待Bi-stable协议模式激活 (读取FSP寄存器 两次)
. 写入想写入的值到PRE1, PRE2或者TFSP_HIGH.
. 切换FSP.MODE到想要的协议
-当处于无故障状态且正在使用Bi-stable协议时:
. 写入想写入的值到PRE1, PRE2或者TFSP_HIGH.
. 切换FSP.MODE到想要的协议
其他外设模块产生的Alarm都几种映射到SMU模块。为此,定义了报警组。报警组索引 ALM< n >[index] 信号与报警配置和状态寄存器 (AG< n >[index]) 之间存在一对一关系。一个组由多达 32 个警报组成。
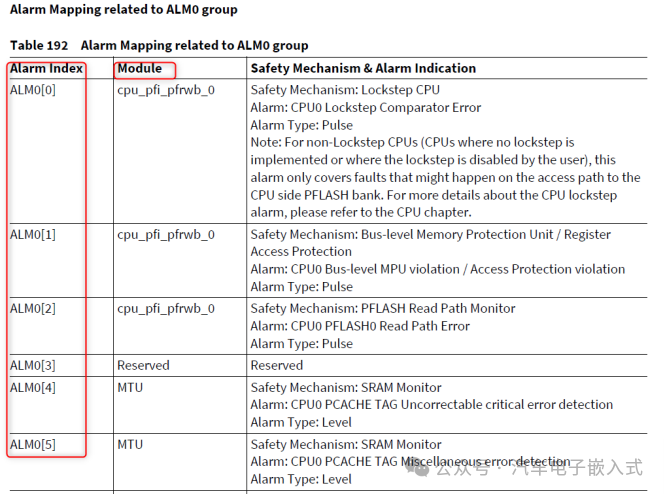
TC37x模块拥有Alarm Group 0-11, Group 20, Group 21共14组Alarm, 每组Group有32个Alarm.
下表描述了 SMU_CORE 生成的警报。
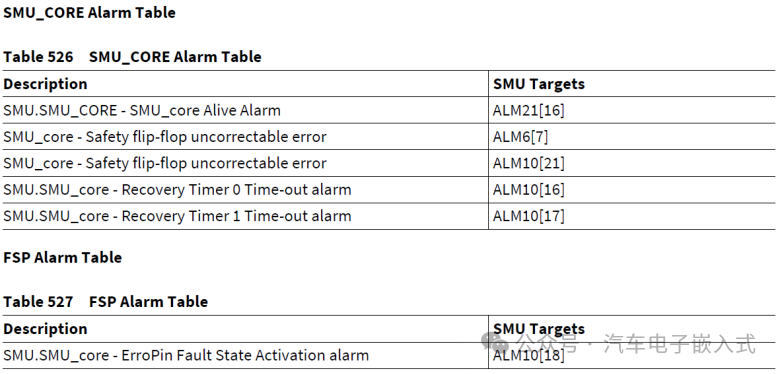
每个安全机制都应使用预定义的协议与 SMU_CORE 连接。该协议允许以可靠的方式跨越时钟域。协议的操作对软件层没有影响。
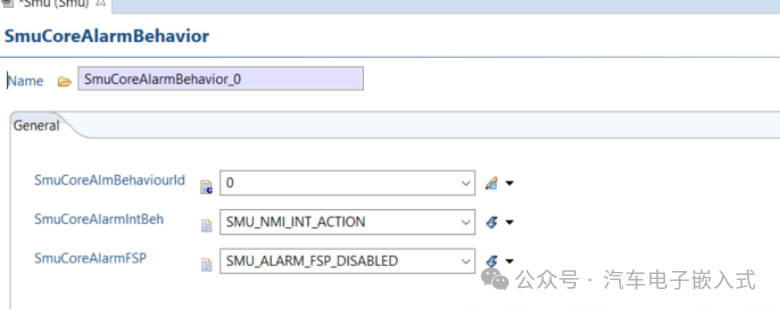
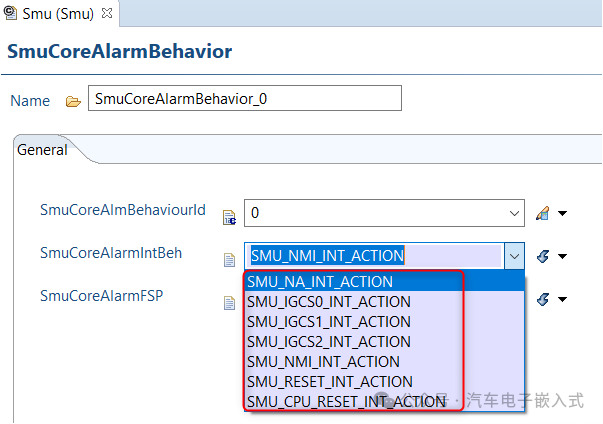
收到报警事件后, SMU_CORE 会对要执行的操作进行解码。该操作可以分为内部行为和外部行为。可以为每个报警配置内部和外部行为。
外部行为与故障信号协议相关 (请参阅故障信号协议 (FSP))。外部行为通过以下寄存器配置:
. AGiFSP (i=0-11)
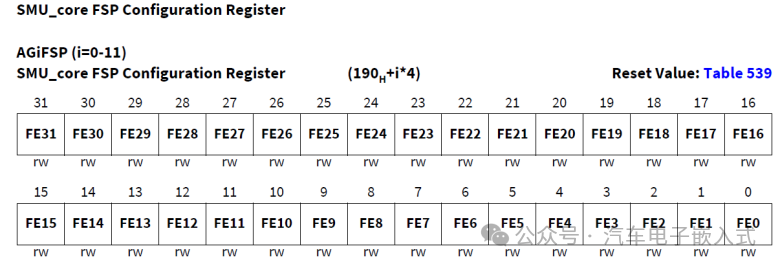
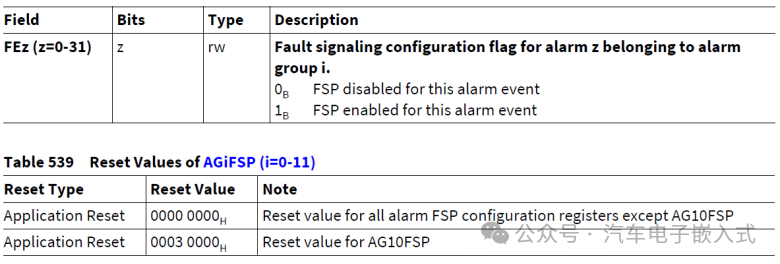
SMU 在出现报警时的内部行为通过以下寄存器进行控制:
. AGiCFj (i=0-11;j=0-2)
内部行为由 3 位代码指定,如下所示:
. Code = SMU_AG
三个bit组成0x0 – 0x7共8种组合。
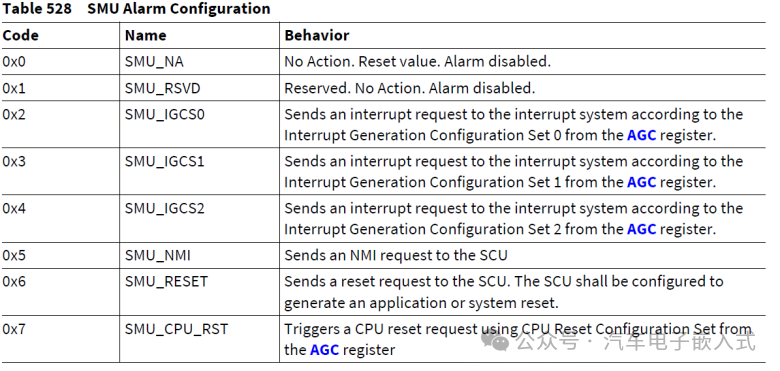
每当检测到输入报警事件且 SMU_CORE 状态机器处于运行(RUN)或故障(FAULT)状态时, SMU 会同时检查要为内部操作和 FSP 执行的相应操作。如果检测到输入报警事件,但未指定报警的操作,则相应的状态位也应设置为 1 ,但不会发生任何操作。
传入报警事件的处理过程如下所示:
•同时扫描所有报警组(Alarm Group)和每个报警。
•挂起的报警(Alarm)的执行是同时进行的。
•报警组内的报警处理可能需要几个 fSPB 周期。
•如果完成了故障处理,则会在 SMU_AEX 寄存器中设置相应的位。只要设置了位,相应的故障处理就会被阻止。故障处理完成后,此位需要由 SW 重置。
–如果SMU_AEX寄存器中与挂起报警相关的报警执行位已设置,则报警事件被忽略,但状态位和相应的报警错过事件位已设置。
–如果与报警事件相关的状态标志已设置为1,则报警事件将被忽略。
–无论何时处理报警事件,AG
表529规定了根据SMU_core状态机状态在AG
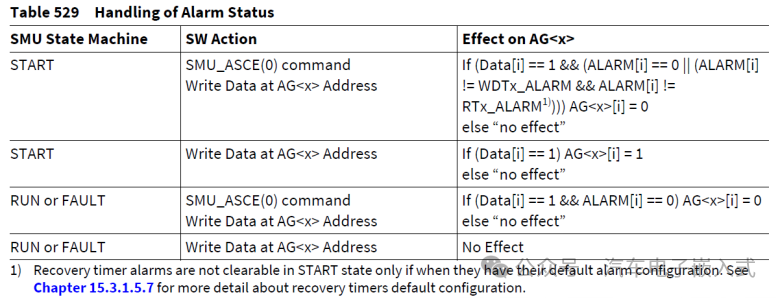
在START状态下,软件可以通过在AG
要清除各个报警标志,请仅使用32位写入。
报警诊断寄存器使应用程序能够改进对导致故障的根本原因的诊断。在这种情况下,如果应用程序允许,它们可能有助于实施恢复策略。当出现以下情况时,SMU_ADx诊断寄存器应生成SMU_AGx寄存器的快照:
. 当SMU处于RUN(运行)或FAULT(故障)状态时,SMU要执行的动作是复位
. 发生将SMU_core状态机(SSMSSM)切换到FAULT状态(RUN->FAULT,FAULT->FAULT)的条件,由SMU硬件或软件命令控制
SMU_ADx寄存器只有在power-on reset后才会被清除。
注:在触发SMU对SMU_AGx寄存器进行快照的每个条件之后,SMU_ADx诊断寄存器将被当前SMU_AGx寄存器值覆盖。如果SMU已经处于FAULT(故障)状态,并且FSP再次激活,则这也是有效的。
Port紧急停止功能可强制Pad进入通用输入模式(General Purpose Input Mode)。SCU的端口紧急停止请求可通过以下任何情况激活:
. SMU_ActivatePES()软件命令。
. SMU_AG< x >FSP 启用且 FSP 启用的报警事件。
. 在 SMU_AG
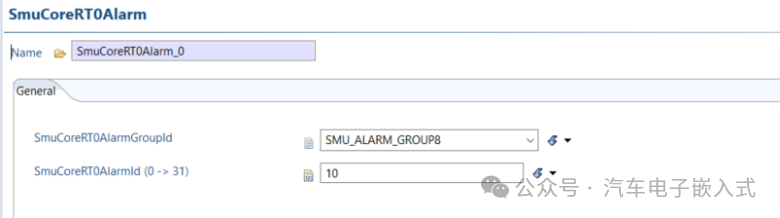
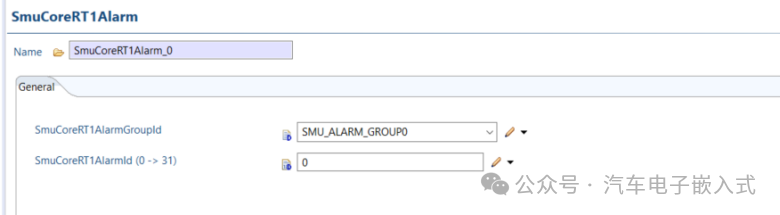
恢复计时器 (RT) 可用于监控通过警报, NMI 或中断操作激活的持续时间或内部错误处理程序。 在当前 SMU_CORE 实现中有两个独立实例 (RT0 和 RT1) 可用。恢复计时器持续时间 (所有实例相同) 在寄存器 RTC 中配置。可以启用或禁用每个实例,但默认情况下,这两个实例都已启用,因为操作 CPU 监视程序时需要使用它们 (另请参阅Watchdog Alarms)。除了 RTC 之外,每个恢复计时器实例还可以使用附加配置寄存器 (RTC00 , RTC01 , RTC10 和 RTC11) 来配置警报映射。
警报映射由一对参数 {GIDi, ALIDi} (i = 0..3) 组成,其中 GIDi 是组标识符,而 ALIDi 是属于组的警报标识符。每个恢复计时器实例可以配置四个 { GIDi , ALIDi } 对。可以多次配置相同的组标识符。如果需要将少于四个报警映射到恢复计时器,则应多次配置相同的 {GIDi, ALIDi}。
注:只有当内部操作是中断或 NMI 时,才可以使用恢复计时器。然而,没有进行硬件检查,而是由软件以适当的方式配置SMU_core.
如果已启用恢复计时器,并且任何 { GIDi , ALIDi } 对都将发生警报事件,并且配置了内部操作导致内部操作 (警报状态应清除) ,则恢复计时器将由硬件自动启动。这种情况称为恢复计时器事件。无内部操作的报警不应启动恢复计时器。
一旦发生恢复计时器事件,恢复计时器将启动并计数,直到软件使用 SMU_RTStop() 停止它。如果计时器超时,将发出内部 SMU 报警 (恢复计时器超时)。在恢复计时器运行期间,请求恢复计时器的任何其他操作都将被忽略。如果发生此类事件, STS 寄存器中的硬件将位 RTME (恢复计时器未接来电事件) 设置为 ‘1 ’。RTME bit 只能通过软件清除。在恢复计时器运行期间, STS 寄存器中的硬件将 RTS bit (恢复计时器状态) 设置为 ‘1 ’:从计时器激活到收到 SMU_RTStop() 或计时器过期。收到 SMU_RTStop() 或计时器到期时,硬件将清除该位 RTS。
如果在恢复计时器未处于活动状态时收到 SMU_RTStop() 命令,该命令将返回错误响应。
注:如果应写入 RTC.RTD ,请确保没有运行恢复计时器 (恢复计时器状态由 STS 寄存器中的 BITS RTS0 和 RTS1 指示)。
如果看门狗 (WDT) 不是由软件或固件提供服务,则需要对监视狗 (WDT) 超时警报进行特殊处理,以确保微控制器行为正确。应确保微控制器在预警阶段后重置,在此阶段,软件仍可以执行一些关键操作。
•每个超时警报都应激活 NMI
•恢复计时器 0 应配置为为安全 WDT , CPU0 WDT , CPU1 WDT 和 CPU2 WDT 的 WDT 超时警报提供服务
•恢复计时器 1 应配置为为维修 CPU3 WDT 的 WDT 超时警报, CPU4 WDT 和 CPU5 WDT
•应将恢复计时器 0 和恢复计时器 1 超时警报配置为发出重置请求并激活故障信号协议。
上述属性作为监视程序超时警报以及恢复计时器 0 和 1 的重置值实现。
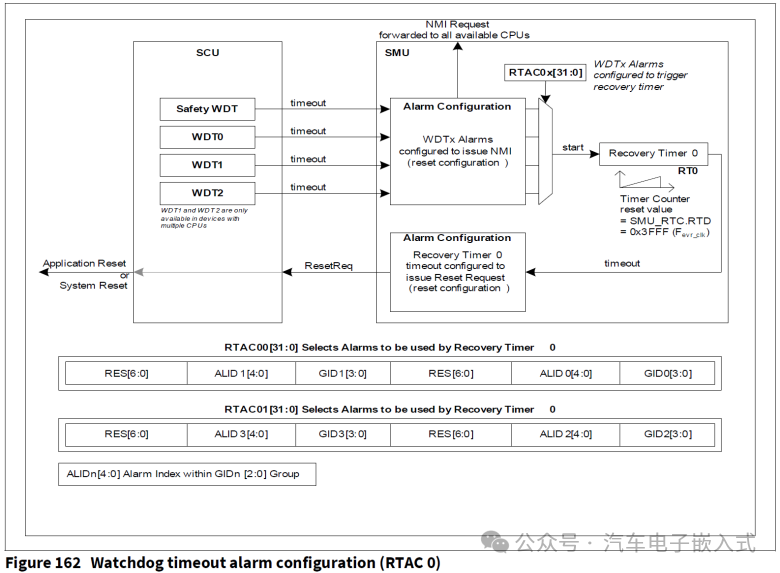
图中仅显示 RTAC 0 和相关的四个 WDT 的示例。同样, RTAC 1 与相关 WDT3 , WDT4 和 WDT5 的设置方式也是如此。
由于也需要从 CPU 执行的第一个指令中检测看门狗超时, SMU 应在启动状态期间处理任何看门狗超时警报。
注:如果所有 WDT 警报都需要相同的行为,建议使用实施逻辑或所有 WDT 超时警报的全局 WDT 超时警报,从而释放 RTC00 , RTC01 , RTC10 和 RTC11 中的某些 {GIDi , ALIDi } 配置对,以用于其他用途。
通过控制接口引入SMU_CORE 的核心功能。控制接口定义了软件如何控制 SMU_CORE ,如表 530 所示。控制接口直接连接到 SMU_CORE 状态机 (SSM) 中所述的 SMU_CORE 状态机 (SSM) 操作和故障信号协议 (FSP) 中所述的故障信号协议 (FSP)。控制接口由 CMD 寄存器使用 CMD 和 ARG 字段实现。命令完成状态可通过 STS 寄存器获取。
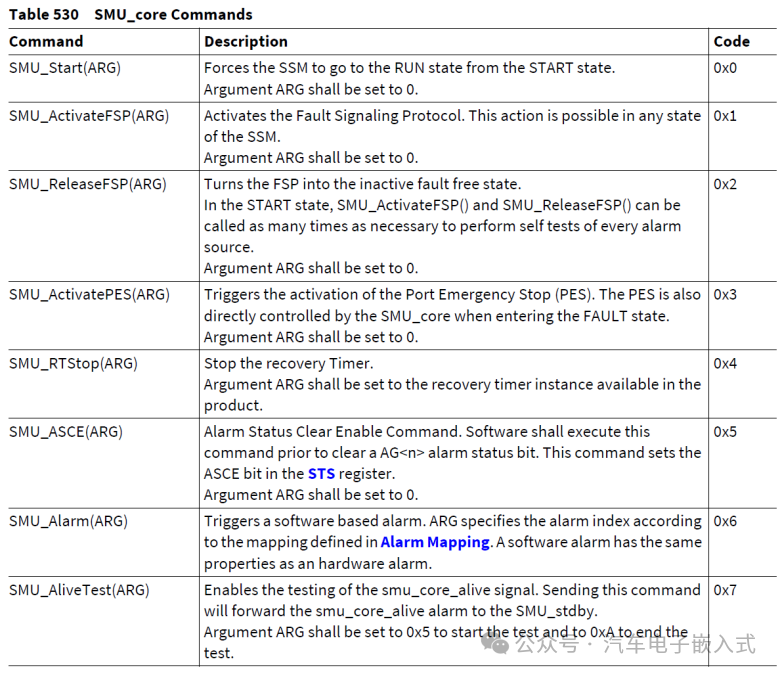
注:如果参数不符合命令规范,则该命令将被忽略并返回错误代码。
下表提供了执行命令的合法条件。 条件取决于 SMU_CORE 状态机器 (SSM) 状态 (参见 SMU_CORE 状态机器)。任何未指定的情况都会导致错误代码。
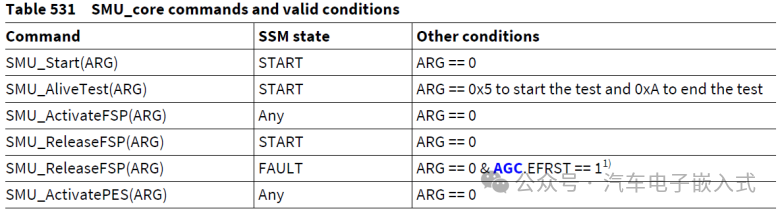
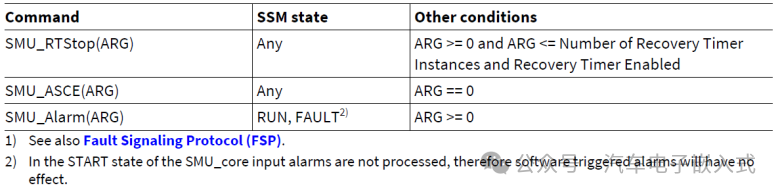
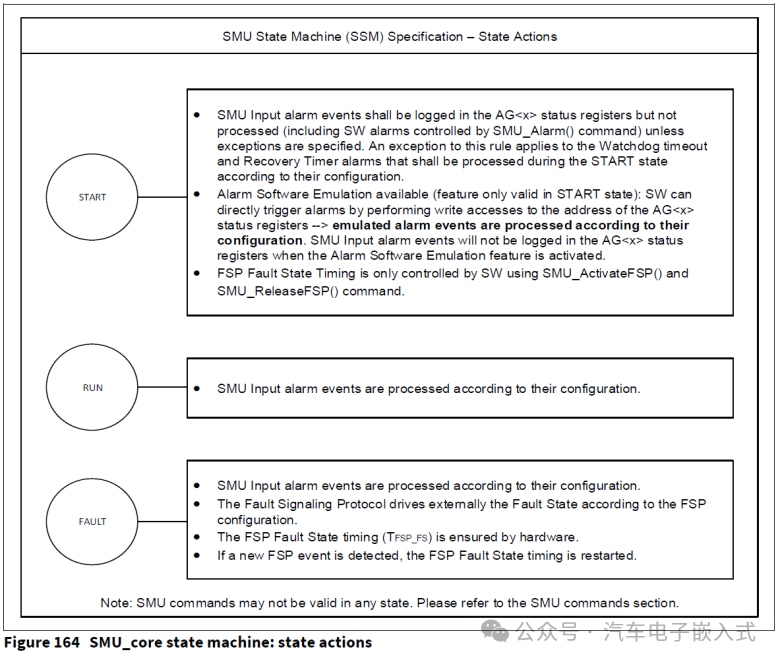
图 163 和图 164 描述了 SMU_CORE 状态机 (SSM) 的行为。
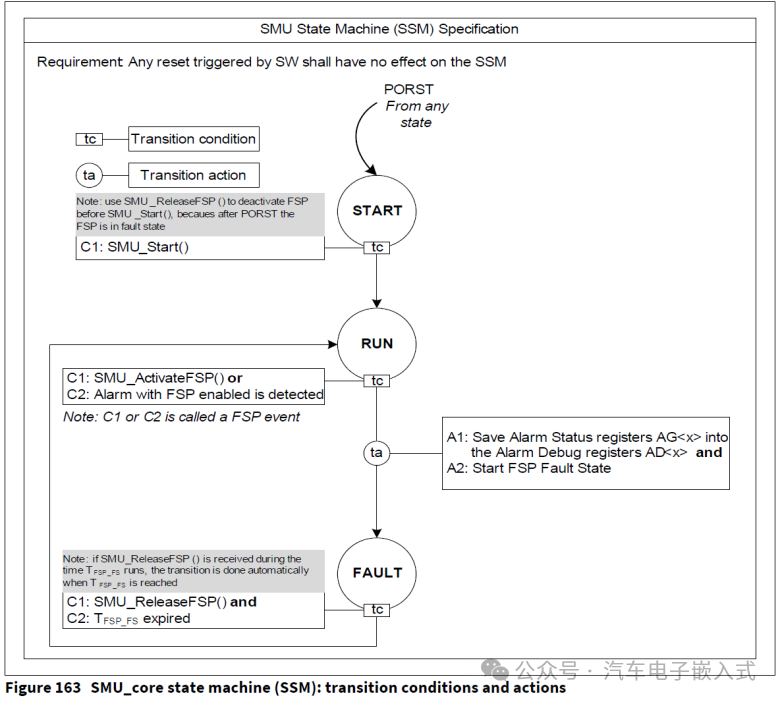
Fault Counter
SMU 实现了一个故障计数器 (AFCNT) ,该计数计数了从运行状态到故障状态的转换次数。故障计数器寄存器只能通过热启动重置来重置。
故障信号协议使微控制器能够向外部安全控制器设备报告紧急情况,以控制安全系统的安全状态。
故障信号协议通过 FSP 命令寄存器进行配置。FSP 状态由 STS 寄存器中的 FSP 标志指示。FSP有三种状态:
•开机重置状态。在热启动重置(warm power-on reset)后, SMU 与端口断开连接 (请参阅 SMU_CORE Integration Guidelines)。在热启动重置后, SMU FSP 输出应为故障状态。
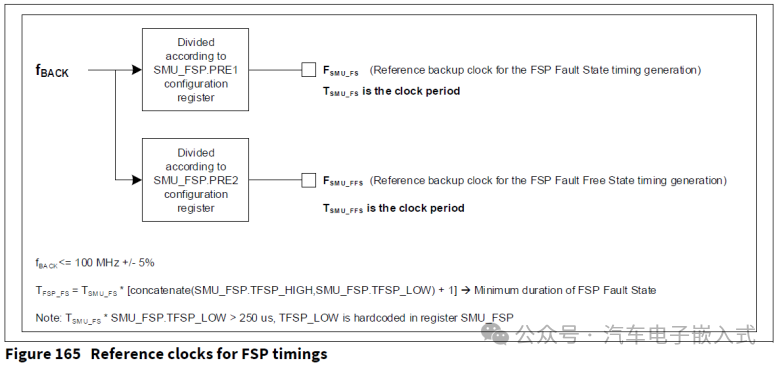
•无故障状态。无故障状态由一个定时器控制,定时器被称为 TFSP_FFS ,并由 FSP 寄存器控制。
•故障状态。故障状态的时间由 FSP 寄存器控制。最小活动故障状态时间称为 TFSP_FS。
无故障和故障状态行为可以使用以下协议进行配置:
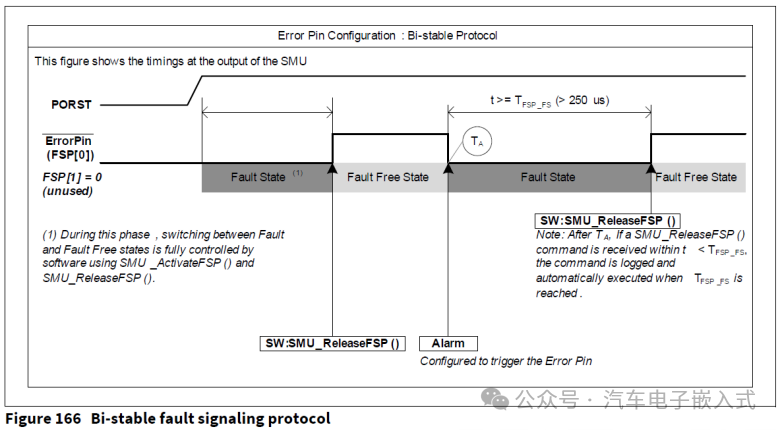
. Bi-stable protocol (default)
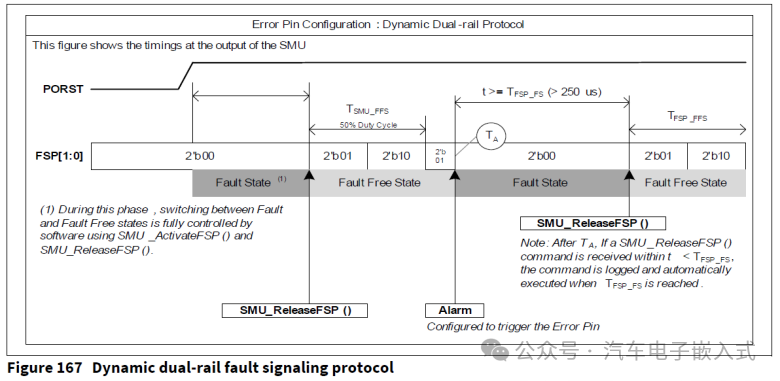
. Dynamic dual-rail protocol
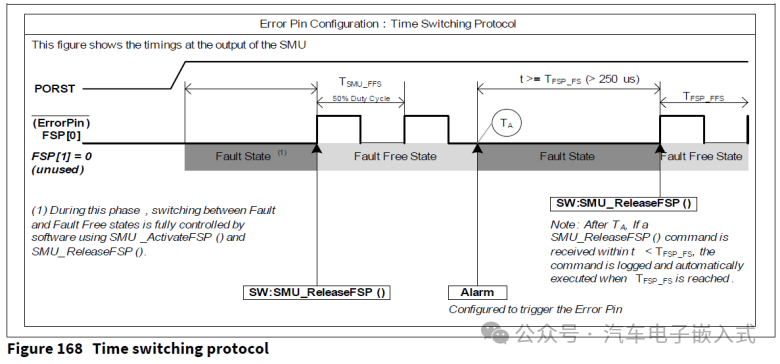
. Time-switching protocol
FSP 可通过以下方式控制:
. 软件方式,通过CMD寄存器使用SMU_ActivateFSP()和SMU_ReleaseFSP()命令。
. 硬件方式,通过AGiFSP(I = 0-11)配置寄存器。
为避免意外报警,仅当 SMU 未处于故障状态且 FSP 处于双稳定协议模式 (FSP 模式 = 00B) 时,才可执行 PRE1 , PRE2 或 TFSP_HIGH 字段的配置。模式切换和配置不应使用相同的写入访问权限来注册 FSP。如果应写入 FSP.PRE1字段,请确保没有运行恢复计时器 (恢复计时器状态由 STS 寄存器中的 BITS RTS0 和 RTS1 指示)。
图 165 指定了生成 TFSP_FFS 和 TFSP_FS 计时的中间时钟。
操作
•在通电重置过程中, FSP[0] =0 (故障状态)。
•通电后重置 FSP[0] 保持故障状态。
• FSP[0] 必须设置为每个软件的无故障状态 (SMU_ReleaseFSP ())。
•在检测到配置为激活 FSP 的报警事件时, FSP [0] 会进入故障状态并保持此状态,直到收到 SMU_ReleaseFSP () 命令,并且满足 TFS_FS 或发生开机重置。
•在故障状态下,如果收到配置为激活 FSP 的新警报事件,但尚未达到 TFSP_FS ,则应重新启动 TFSP_FS 计时。
•在故障状态下,如果收到配置为激活 FSP 的新报警事件,并且已经达到 TFSP_FS ,则应启动 TFSP_FS 计时。
操作
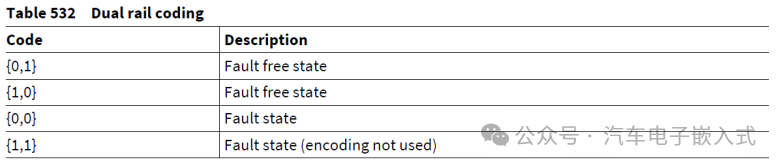
双轨编码是对位进行编码的另一种方法。 双轨代码使用两个信号来定义逻辑状态。
•在通电重置过程中, FSP[1:0]=2'B00 (故障状态) •通电重置后, FSP[1:0] 保持故障状态。
• FSP[1:0] 必须设置为每个软件的无故障状态 (SMU_ReleaseFSP ())。
•故障无状态由 FSP[1:0] 在 2'B01 和 2'B10 之间振荡定义,其定义频率通过 FSP 寄存器配置,占空比为 50% (参见图 167)。
•在检测到配置为激活 FSP 的报警事件时, FSP [1:0] 会立即进入故障状态,并保持此状态,直到收到 SMU_ReleaseFSP () 命令且 TFS_FS 满足或启动
重置发生。
使用定义的频率在逻辑级别 0 和逻辑级别 1 之间切换 FP[0]。当 SMU_CORE 进入故障状态时,将违反此频率调制协议。
•在通电重置过程中, FSP[0] =0 (故障状态)。
•加电后重置 FSP[0] 保持故障状态。
• FSP[0] 必须设置为每个软件的无故障状态 (SMU_ReleaseFSP ())。
•在无故障状态下,使用通过 FSP 寄存器配置的频率, FSP[0] 在逻辑级别 0 和逻辑级别 1 之间振荡 (参见图 168)。
•在检测到配置为激活 FSP 的报警事件时, FSP [0] 会立即进入故障状态,并保持此状态,直到收到 SMU_ReleaseFSP () 命令且 TFS_FS 满足或启动要求重置发生。
当警报配置为激活 FSP 时, SMU_CORE 会自动切换到故障状态。在此期间,安全相关软件还可以尝试分析根本原因 (当微控制器仍在运行时) ,并确定错误的严重程度。由于 FSP 至少对 TFSP_FS 处于活动状态,因此可以确保通过独立于微控制器的外部机制 (除了 FSP 本身) 输入系统的安全状态。在 TFSP_FS FSP 处于故障状态期间,软件可能已断定故障不严重,并决定发SMU_ReleaseFSP () 命令,通知 SMU_CORE 它可以返回到运行状态 (软件错误处理程序的运行时间与 TFSP_FS 的持续时间没有直接关联,在实践中应该要短得多)。
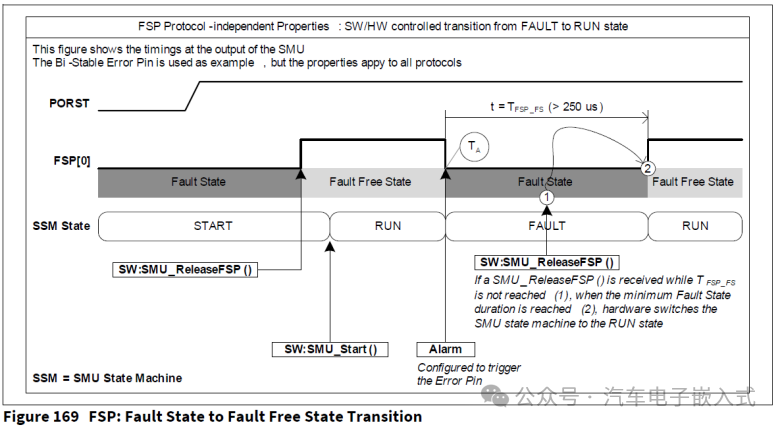
应谨慎使用此功能,当 SMU 报告的故障被评估为不严重时,强烈建议重置微控制器以重新启动安全功能的操作。因此,默认情况下,此功能处于禁用状态,应使用 AGC 寄存器中的 EFRST (启用故障到运行状态转换) 字段进行配置。
图 170 显示了一个典型的使用案例,其中 FSP 在故障状态和无故障状态之间的转换由软件使用 SMU_ReleaseFSP() 和 SMU_ActivateFSP() 命令进行控制。
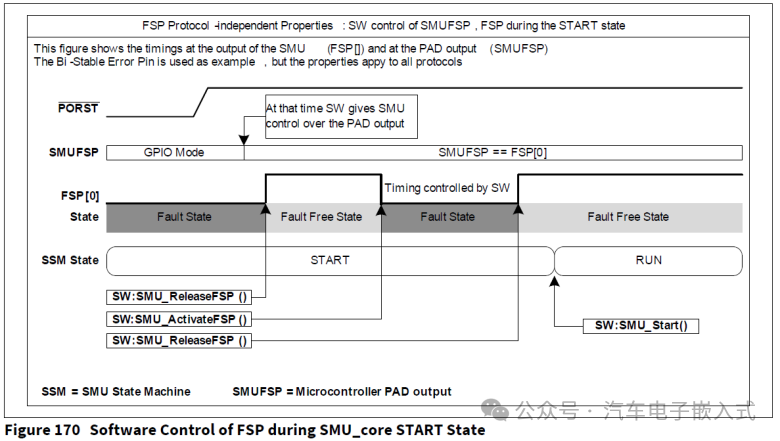
使用条件:
软件应确保 FSP 处于无故障状态,然后使用 SMU_Start() 命令输入运行状态。
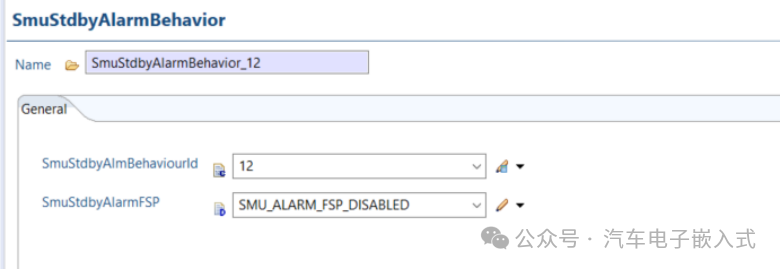
概念和SMU_core基本一样,参考芯片手册。
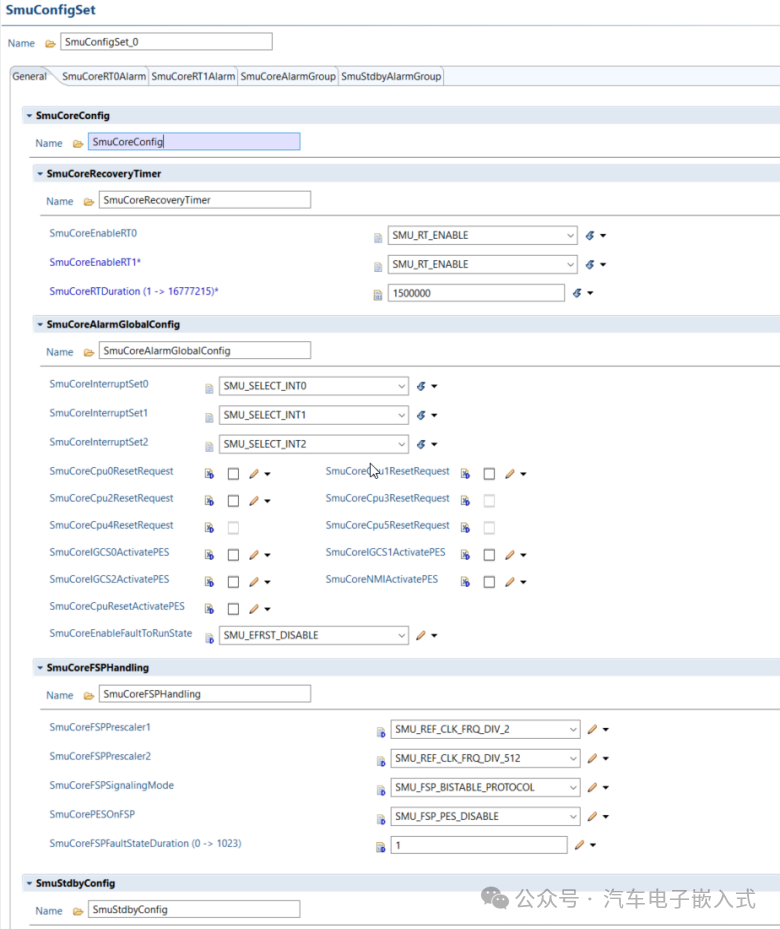
和其他硬件模块一样,理解了模块的原理和基本概念后,模块配置就是按照项目的需求配置模块相关的寄存器,只不过提供了图形化的配置工具。
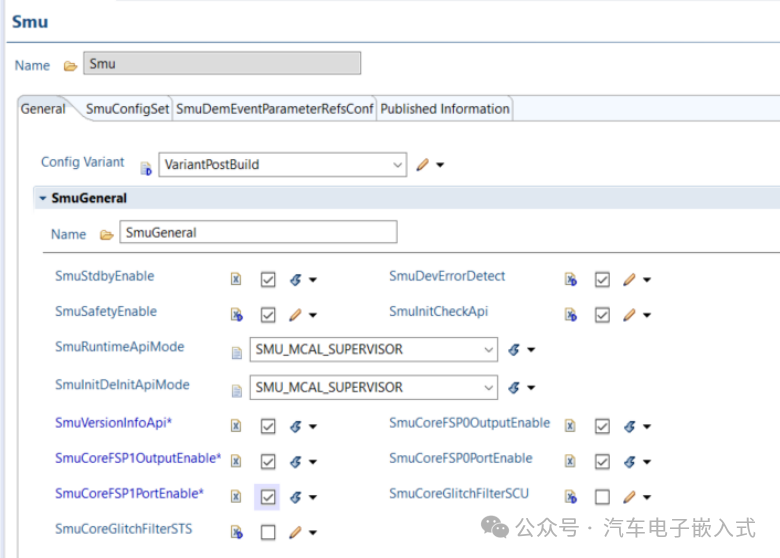
SMU General主要配置一些全局的属性,以及是否使能一些SMU的功能,是否要使能一些API.
SMU模块是Aurix芯片自带的一个功能安全硬件模块,它能够收集其他模块(PMS, MTU, SCU, CCU, e.g.)由于硬件功能安全机制产生的报警(Alarm),然后,SMU模块通过用户配置能够产生内部或者外部的动作/响应,也可以不产生任何动作。对于使用SMU的用户而言,外部响应一般都很少使用,主要就是查对应芯片手册,知道哪一个硬件模块可以产生一个对应SMU的Alarm,然后配置该Alarm产生后需要执行的动作即可。
End
「汽车电子嵌入式在CSDN上同步推出AUTOSAR精进之路专栏,本专栏每个模块完全按实际项目中开发及维护过程来详细介绍。模块核心概念介绍、实际需求描述、实际工程配置、特殊需求介绍及背后原理、实际工程使用经验总结。目的是让读者看完每一个章节后能理解原理后根据需求完成一个模块的配置或者解决一个问题。」
点击文章最后左下角的阅读原文可以获取更多信息
或者复制如下链接到浏览器获取更多信息
https://blog.csdn.net/qq_36056498/article/details/132125693
文末福利
2.为便于技术交流,创建了汽车电子嵌入式技术交流群,可尽情探讨AP,CP,DDS,SOME/IP等前沿热点话题,后台回复“加群”即可加入;
注:本文引用了一些第三方工具和文档,若有侵权,请联系作者删除!
推荐阅读
汽车电子嵌入式精彩文章汇总第一期:20210530-20230703
汽车电子嵌入式精彩文章汇总第2期
TC3xx芯片GTM模块-CMU,CCM,TBU详解
TC3xx芯片GTM模块-TOM详解
AUTOSAR架构下PWM模块配置实践
TC3xx芯片GTM模块-TIM详解
AUTOSAR架构下ICU模块配置实践
TC3xx芯片电源管理系统PMS详解
TC3xx DMA模块详解
编译链接专题第1篇-make和makefile介绍
编译链接专题第2篇-初识makefile结构
编译链接专题第3篇-初识makefile中的伪目标
编译链接专题第4篇-变量和变量的不同赋值方式
End
欢迎点赞,关注,转发,在看,您的每一次鼓励,都是我最大的动力!
汽车电子嵌入式
微信扫描二维码,关注我的公众号
