微信公众号:OpenCV学堂
关注获取更多计算机视觉与深度学习知识
OpenCV支持的并行框架
1. Intel TBB (第三方库,需显式启用)2. C=并行C/C++编程语言扩展 (第三方库,需显式启用)3. OpenMP (编译器集成, 需显式启用)4. APPLE GCD (苹果系统自动使用)5. Windows RT并发(Windows RT自动使用)6. Windows并发(运行时部分, Windows,MSVC++ >= 10自动使用)7. Pthreads
在VS IDE中开启OpenMP,只需要右键点击项目,从属性中
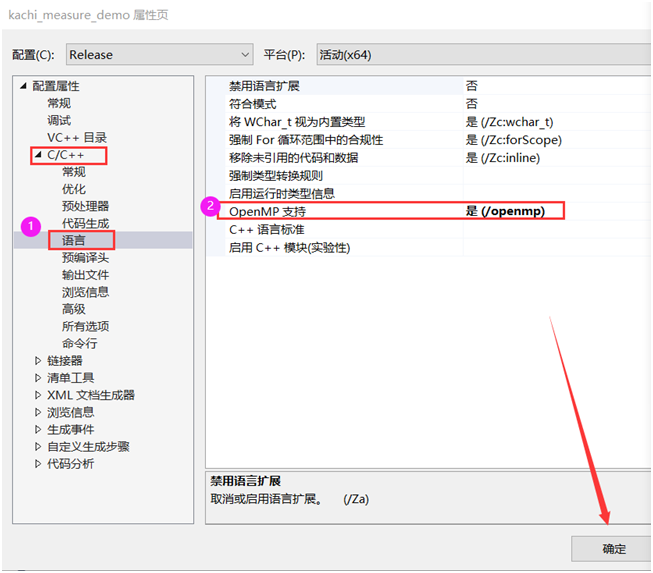
这样就可以开启并行加速。
卷积并行实现与时间比较
parallel_for_ParallelLoopBody
start = (double)cv::getTickCount();for (int row = 0; row < rows; row++) {for (int col = 1; col < cols - 1; col++){int sum = src.at(row, col) + src.at (row - 1, col) + src.at (row + 1, col) + src.at(row, col - 1) + src.at (row - 1, col - 1) + src.at (row + 1, col - 1) + src.at(row, col + 1) + src.at (row - 1, col + 1) + src.at (row + 1, col + 1); int pv = sum / 9;dst.at(row, col) = pv; }}
double start = (double)cv::getTickCount();parallel_for_(Range(0, rows * cols), [&](const Range &range){for (int r = range.start; r < range.end; r++){int i = r / cols, j = r % cols;double value = 0;for (int k = -sz; k <= sz; k++){uchar *sptr = src.ptr(i + sz + k);for (int l = -sz; l <= sz; l++){value += kernel.ptr<double>(k + sz)[l + sz] * sptr[j + sz + l];}}dst.ptr(i)[j] = saturate_cast(value); }});double time = (((double)cv::getTickCount() - start)) / cv::getTickFrequency();std::cout << "parallel_for_conv3x3 execute time: " << time * 1000 << " ms" << std::endl;
class parallelConvolution : public ParallelLoopBody{private:Mat m_src, &m_dst;Mat m_kernel;int sz;public:parallelConvolution(Mat src, Mat &dst, Mat kernel): m_src(src), m_dst(dst), m_kernel(kernel){sz = kernel.rows / 2;}virtual void operator()(const Range &range) const CV_OVERRIDE{for (int r = range.start; r < range.end; r++){int i = r / m_src.cols, j = r % m_src.cols;double value = 0;for (int k = -sz; k <= sz; k++){const uchar *sptr = m_src.ptr(i + sz + k);for (int l = -sz; l <= sz; l++){value += m_kernel.ptr<double>(k + sz)[l + sz] * sptr[j + sz + l];}}m_dst.ptr(i)[j] = saturate_cast(value); }}};
调用方式如下:
start = (double)cv::getTickCount();parallelConvolution obj(src, dst, kernel);parallel_for_(Range(0, rows * cols), obj);time = (((double)cv::getTickCount() - start)) / cv::getTickFrequency();std::cout << "parallelConvolution conv3x3 execute time: " << time * 1000 << " ms" << std::endl;
运行结果如下:

对此,我自己也有一些原因分析,但是更希望大家留言分析一下相关原因,为什么没有加速效果??

推荐阅读
OpenCV4.8+YOLOv8对象检测C++推理演示
总结 | OpenCV4 Mat操作全接触
三行代码实现 TensorRT8.6 C++ 深度学习模型部署
实战 | YOLOv8+OpenCV 实现DM码定位检测与解析
对象检测边界框损失 – 从IOU到ProbIOU
YOLOv8 OBB实现自定义旋转对象检测
初学者必看 | 学习深度学习的五个误区
YOLOv8自定义数据集训练实现安全帽检测