毫米波雷达,从3D到4D,从稀疏点云到接近成像级别的密集点云输出,下一个阶段的变革,将是围绕整车电子架构的升级匹配。
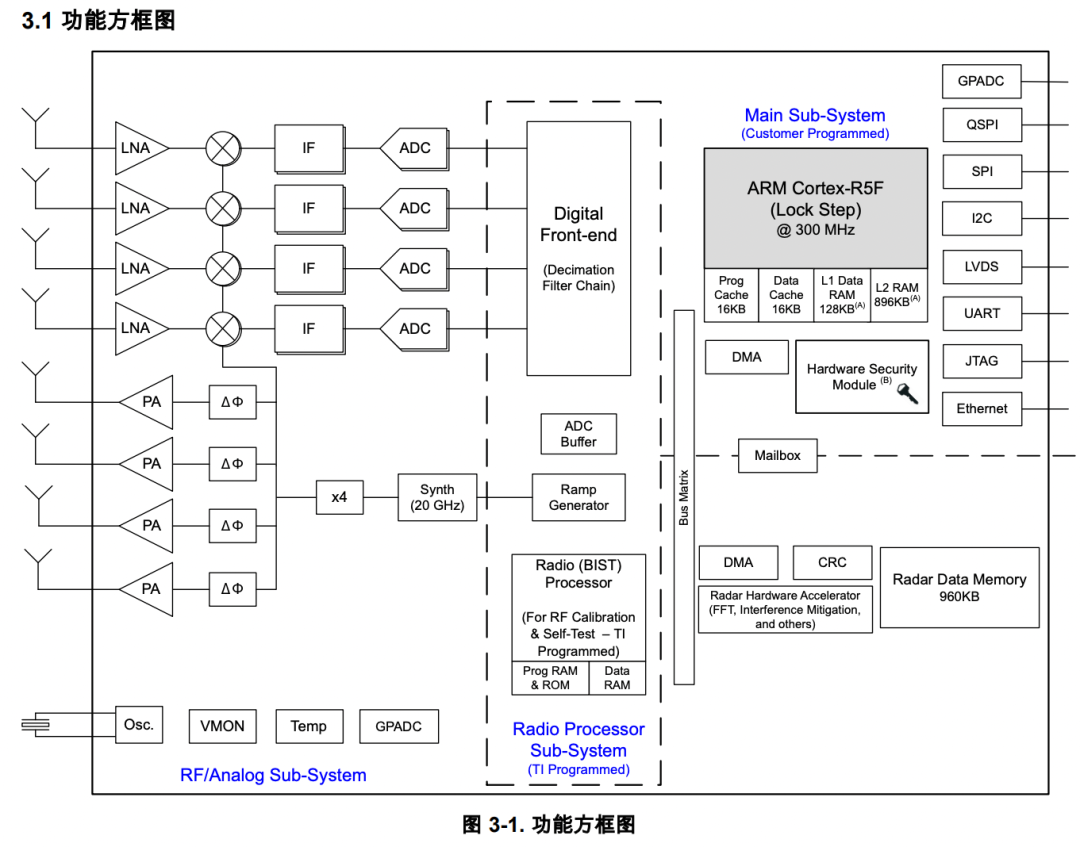
在今年的CES展期间,全球主要的毫米波雷达芯片供应商—TI宣布,正式推出第一代可用于卫星雷达架构(中后段数据处理集中至域控制器)的芯片方案(命名为:AWR2544)。
AWR2544,也是业界首款采用LOP技术的单芯片方案。这种技术通过在印刷电路板的另一侧集成3D波导天线(也就是封装上装载波导接口),将传感器的尺寸缩小了30%。
AWR2544官方介绍资料
同时,AWR2544采用低功耗45nm RFCMOS工艺制造,能够在小型封装中以超低BOM数量实现高集成度(包括PLL、VCO、混频器以及基带ADC)。
众所周知,目前,已经上车的4D成像雷达,大多数都是采用FPGA作为端侧的大数据处理,成本高昂。而,相比而言,卫星架构的雷达本身不需要这种额外增加成本处理能力。
比如,由于点云数量的大幅增加,卫星架构可以充分利用域控制器的算力冗余,用于目标检测、分类和跟踪的高级算法。
此外,目前,部分车企只是尝试在前向或者盲区升级部分雷达来进行4D成像的验证测试。同时,出于成本考量,5R/6R配置不会全部采用4D成像。
而采用卫星架构,从数量的角度,可以帮助雷达供应商实现更快规模化的前装上车;对于车企来说,也是降本增效的一种途径。
“成像雷达已经引发了市场的高度关注。与此同时,我们也发现市场对实现最佳性能的成像雷达有强烈需求。”法雷奥认为。而从去年的行业进展来看,4D雷达的成本大幅下降,预期将带动市场真正起量。
而在今年的CES展上,一家来自中国的4D雷达初创公司—Altos Radar(傲图科技)带来了两款高性能4D成像毫米波雷达,价格仅为激光雷达的1/10。
比如,Altos V系列的最新产品Altos V2(前向4D雷达),是全球首个采用非FPGA方案量产的4D雷达,基于TI的TDA4完成芯片级联设计。按照目前的市场价位,预计可以降本20%以上。
而此外,Altos RF系列就是一款非计算前端雷达模块(也就是常说的卫星式传感器架构),基于域控制器的计算资源来进行数据处理,大幅降低端侧的硬件成本,预计可实现50%的降本。
目前,行业内主要有三种方案来实现降本。
一是开发定制的ASIC来代替FPGA;比如,NXP推出的业界首款专用16nm成像雷达处理器S32R45,配置4个Arm® A53内核,3个锁步Arm M7内核以及8MB SRAM+LPDDR4+外部闪存。
第二种解决方案,主要是减少级联以及国产化芯片方案;比如,楚航科技推出的两片级联方案,基于传统3D毫米波雷达工艺设计和硬件结构,多增加了一颗射频芯片,能够在算法、射频天线和硬件升级上大幅提升产品性能,并做到有效的成本控制。
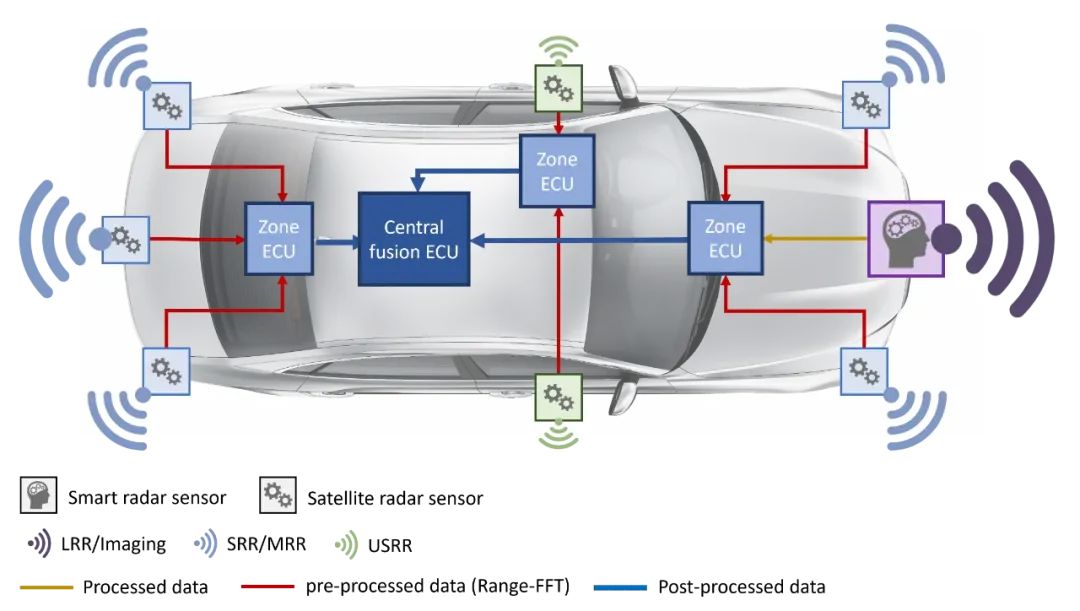
第三种解决方案,就是分布式+中央计算架构,将车身上搭载的多颗环绕4D雷达的数据在中央域控制器(比如,智驾域控制器)进行协同融合处理,从而降低端侧数据处理要求。
尤其是4D成像雷达带来的密集点云,以及俯仰角带来的测高能力,则是为深度神经网络模型训练带来可能。同时,借助雷达的BEV特征图,更是可以与图像BEV特征融合,进一步增强目标检测的置信度。
“通过降低汽车架构的复杂性,行业才能够继续应对功能丰富、高度自动化带来的快速增长的软硬件复杂性,比如,更多的传感器配置。”在业内人士看来,软硬解耦的关键,在于不断简化端侧的复杂性,将更多的处理能力集中到中央域。
在安波福看来,传统汽车时代,数量不多的传感器被设计成独立数据处理输出,是符合现实需求的,同时可以适配不同平台、不同定位的车型。典型的代表,就是前视一体机方案。
然而,随着传感器数量的增加、功能的进阶,当下的传感器分布式处理架构意味着,独立开发和碎片化的软件算法功能部署和额外的芯片成本。
这也就诞生了今天的卫星式处理架构。
该架构将智能化从传感器中分离出来,并将其集中在一个强大的中央域控制器中,保留“卫星”传感器,其中仅包含数据采集(比如,毫米波雷达的收发器件)的必要硬件,而处理和决策则在域控制器中进行。
同时,软硬解耦的趋势,也在影响传感器的架构设计,一旦实现标准化的点云处理软件开发,就可以实现即插即用,极大缩短系统的整个开发周期。
此外,从传统3D到4D成像的技术升级,软件算法能力成为过去更多依靠硬件设计开发和制造的毫米波雷达企业的短板。(尤其是从4D到成像,对于软件的要求,也是一个质的变化)
比如,4D成像雷达在点云密度增加的情况下,如何增加检测的成功概率,减少回声的噪音,并实现远处信号反射较弱物体的检测,还需要解决多信号的干扰问题。
同时,相比于传统3D雷达的检测(由于角分辨率不足,无法区分静态目标,以及分类不准的问题),4D雷达还需要增加额外的从点云到聚类,目标精准识别分类的能力。
此前,Arbe公司就直言:我们正在尽可能提供软件堆栈,帮助我们的最终客户(汽车制造商)尽快适应这项技术。而对于车企和Tier1来说,同样也需要时间来优化软硬件性能。
同样,特斯拉此前也对外证实:目前,公司仅在Model S和X两款车型上进行相关验证工作,来评估产品的实际性能,目前还没有计划将4D雷达搭载至Model 3和Y两款走量车型。
不过,4D成像市场本身也在分层。
比如,去年,标准版4D成像雷达的交付价格已经下降至500-1000元,最低甚至已经跌破了500元,价格正在快速向3D前向雷达靠近。多位企业人士透露,预计2024年的价格还会下降30%-40%。
这种产品的需求,主要来自于直接替换传统雷达。但,性能本身不会对整车算力产生太大的影响(比如,增加测高能力,输出比之前更多的点云)。
原因是,“目前来看,4D毫米波雷达作为主传感器,面临的最大的问题是4D成像雷达还处于前装导入的早期阶段,未来性能还需要大幅提升,同时主机厂和Tier1并不知道4D点云能做什么?“
比如,双芯片级联方案在成本和性能上面可以做到很好的平衡,未来几年内将是4D成像雷达规模化上车的主流方案。但,也有企业在寻求技术突破。
安波福在去年推出了第七代4D毫米波角雷达,由中国本土团队主导开发,搭载了国内首颗一体式集成雷达芯片以及业界首款空气波导天线方案。
此外,安波福也是全球最早提出传感器卫星架构概念的供应商之一。该公司给出的数据显示,上述架构可以使雷达传感器体积缩小70%,重量减轻30%,同时,也更有利于未来对传感器的OTA升级。
同时,这种架构的优势还在于,更能够适应未来车端硬件可插拔的概念。因为软硬真正分离,意味着,硬件的增减不需要车企重新开发软件。