人体触觉的产生需要通过皮肤上的多种机械感受器获得大量复杂的数据,经过大脑处理之后给予人们丰富的触感。如何使用触觉反馈器件精确地再现真实的触觉非常具有挑战性。现有的科学研究已经探索了多种用于触觉反馈的硬件设施,包括接地设备、可以调控形貌的动态表面、手柄和可穿戴器件等。其中,可穿戴器件可以给用户提供最大的移动性以及与现实世界互动的可能性。此外,反馈设备与皮肤建立保形接触可以最大限度地减少对人体与真实世界交互的影响,并在用户和设备之间提供有效的信息传输路径。然而,贴皮式触觉界面的发展仍处于早期阶段。
人体的皮肤包含多种触觉感受器,根据其功能和形状特征可以分为不同的类型。神经末梢广泛地分布于皮肤表层,它们是无髓鞘的神经末梢分支,对温度和疼痛等刺激敏感。此外,有五种被髓鞘包裹的机械感受器专门向大脑提供各种触觉信息,包括Meissner's corpuscles, Merkel's disks, Pacinian corpuscles, Ruffini endings, Krause end bulbs。触觉的产生与接触表面的多维度参数有关,包括精细粗糙度、宏观粗糙度、硬度、滑度和温度等。因此,实现真实的触觉再现需要一个反馈界面能够尽可能多地提供多维度的信息。
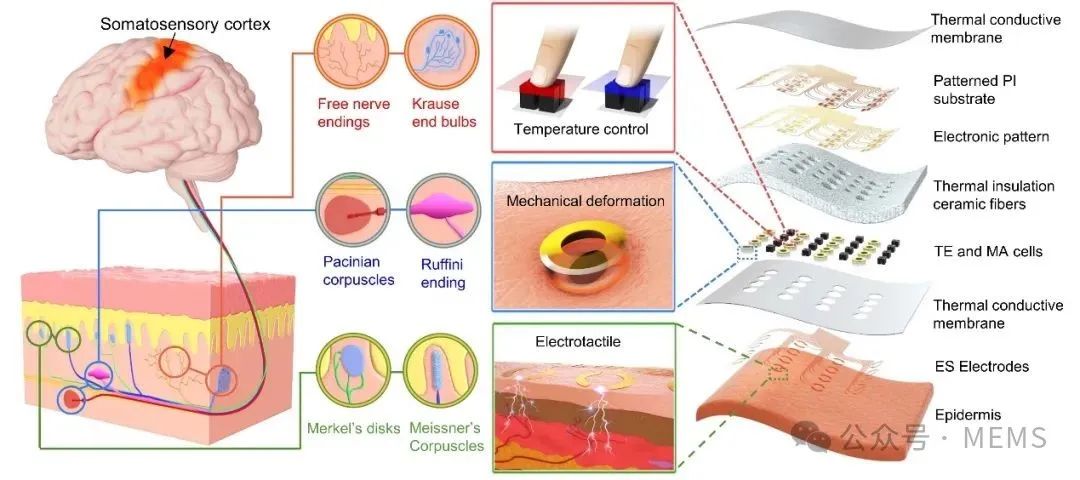
皮下触觉传感器及其对应的三种刺激模式。多模态触觉反馈界面的分层结构图,每个反馈单元包括一个机械致动器(MA),两对热电(TE)元件和一对电触觉(ES)电极。
为了解决这些挑战并改善触觉反馈界面的性能,香港城市大学于欣格教授团队联合香港城市大学朱克宁教授和大连理工大学解兆谦教授团队开发了一种贴皮式多模态触觉反馈接口,该接口包括三种驱动模式: 温度、机械变形和电触觉刺激来激活皮肤中的不同触觉受体的信号。热电单元可以控制皮肤上的温度变化,从而再现皮肤和物体之间的热触感。器件的夹层结构有助于高效散热,确保有效的热反馈。机械感觉可以通过使用机械致动器诱导皮肤变形产生,特别是针对Pacinian corpuscles和Ruffini endings的激活。另一方面,电刺激可以激活皮肤较浅层的Merkel's disks和Meissner's corpuscles相关的神经活动。与单一机械或者电刺激模式相比,电触觉和机械振动器之间的联合交互增强了它们的综合性能,从而提高了0-250 Hz频率范围内触觉反馈的真实性。
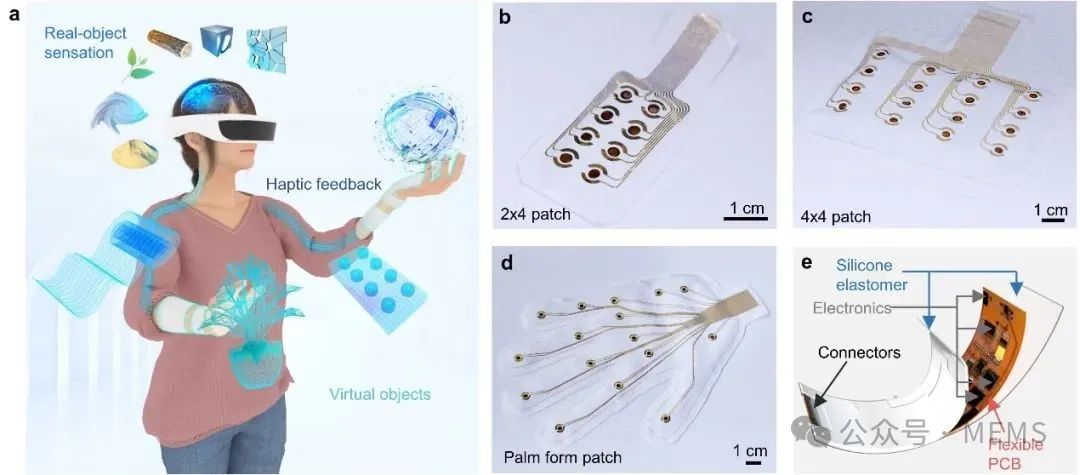
多模态触觉反馈界面的应用场景。a,通过在VR中使用该触觉反馈界面,用户可以感受到虚拟物体的感觉。不同排布结构的触觉反馈器件的照片,2x4阵列(b)、4x4阵列(c)和手掌形阵列(d). e, 无线控制电路的三维图形。
用户实验结果表明该界面成功提供了精细粗糙度、宏观粗糙度、滑度和温度等维度上的高保真触觉反馈。
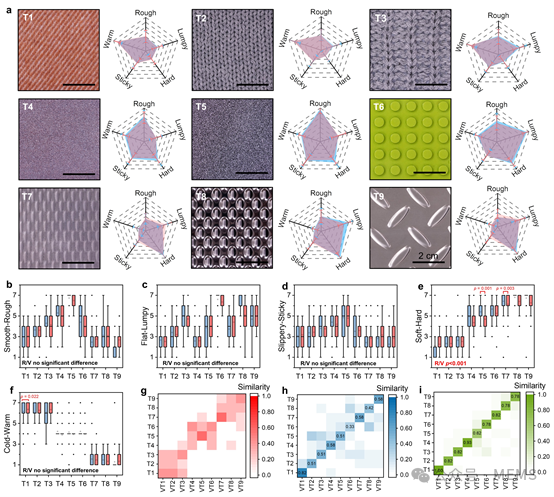
多维度真实材质触感再现的用户实验结果
这种贴皮式多模态触觉反馈界面的开发可以使用户更身临其境地参与虚拟世界,构建进入虚拟世界的“门”。其应用范围从线上工作和娱乐到外科机器人手术以及工业技术培训都具有很大前景。
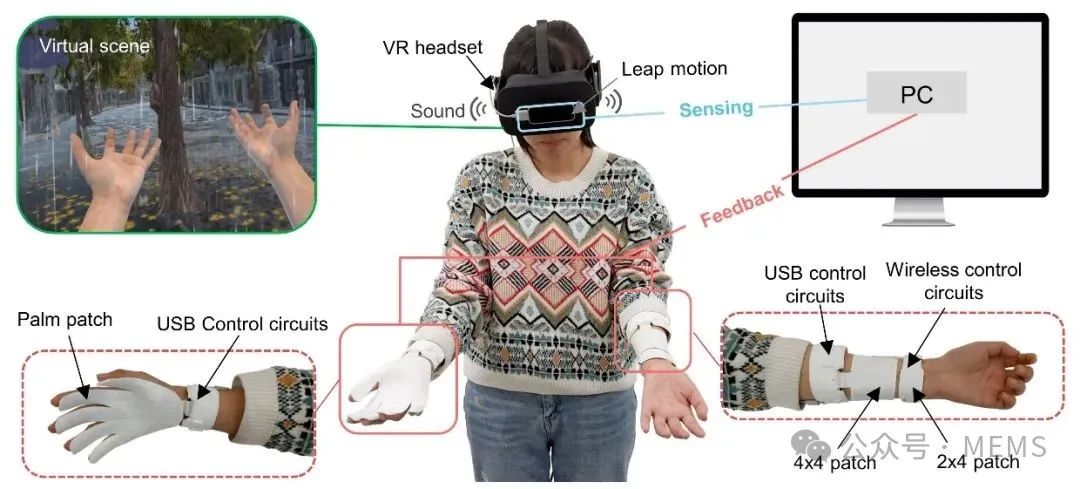
一个被试者戴着虚拟现实眼镜,可以获得视觉和听觉反馈。同时跟踪她的手部运动,当手部与虚拟物体接触的时候向计算机发送信息,控制中心可以向触觉反馈界面发送命令,以激活用户在虚拟世界中触摸不同的虚拟物体时手部和手臂的触觉反馈。
于欣格教授团队已经为这项发明提交了美国专利申请。该研究小组将继续致力于开发高性能反馈接口及其实际应用。这一结果已经发表在科学杂志《Nature Electronics》上,标题为“A skin-integrated multimodal haptic interface for immersive tactile feedback”。
论文链接:
https://doi.org/10.1038/s41928-023-01074-z