高保真度和舒适的电生理(EP)信号记录,以及即时设置,对于医疗保健和人机接口(HMIs)至关重要。微针电极允许直接接触表皮,消除了耗时的皮肤准备。然而,现有的微针电极缺乏弹性和可靠性,这对于在身体运动期间实现长期、高质量的电生理传感构成了挑战。
为解决上述问题,韩国科学技术院(Korea Advanced Institute of Science and Technology)和美国科罗拉多大学波尔德分校(University of Colorado Boulder)介绍了一种可伸缩的微针胶粘贴片(SNAP),它提供了出色的皮肤穿透性和强大的电机械皮肤接口,适用于在不同皮肤条件下进行持久且可靠的电生理监测。结果表明,SNAP能够在皮肤污染下显著降低皮肤接触阻抗,并在运动期间提高佩戴舒适度,优于凝胶和柔性微针电极(FME)。此外,这种无线SNAP可以用于外骨骼机器人控制,显示了其在时间动态皮肤条件下实现高度可靠人机接口的潜力。展望未来,SNAP将为可穿戴电生理传感及其在人机接口中的现实世界应用开辟新的机会。该研究以“Skin preparation–free, stretchable microneedle adhesive patches for reliable electrophysiological sensing and exoskeleton robot control”为题发表在《Science Advances》期刊上。
SNAP的设计与工作原理
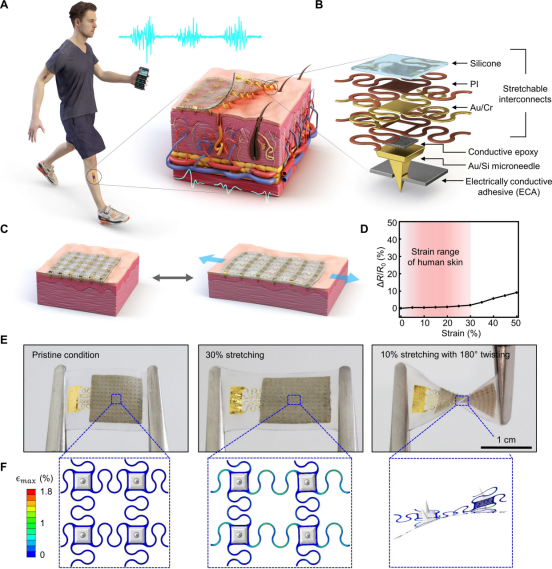
图1描述了SNAP的整体系统配置和应用,以及其工作原理。SNAP的柔性、组织适应性微针阵列能够穿透角质层直接接触表皮,从而无需痛苦和皮肤准备即可进行高质量的电生理信号采集。此外,图1还强调了SNAP在适应组织拉伸方面的能力,这通过其在皮肤变形时的机械特性得到了证明。通过实验和有限元分析(FEA)的结果,可知SNAP能够在人类皮肤的最大拉伸范围内(约30%)拉伸,且相对电阻变化微不足道(<5%),并且金属轨迹的最大主应变仅为1.8%。这些发现证实了SNAP在电气和机械可靠性方面的卓越性能,尤其是在超过人类皮肤典型耐受度(10至20%)的应变水平上。总的来说,SNAP的独特设计,将穿透性微针阵列与组织适应性弹性电极相结合,能够在各种皮肤条件下提供舒适且高度可靠的电生理信号长期监测,且受到的干扰最小。
SNAP的制造、材料和机械性能
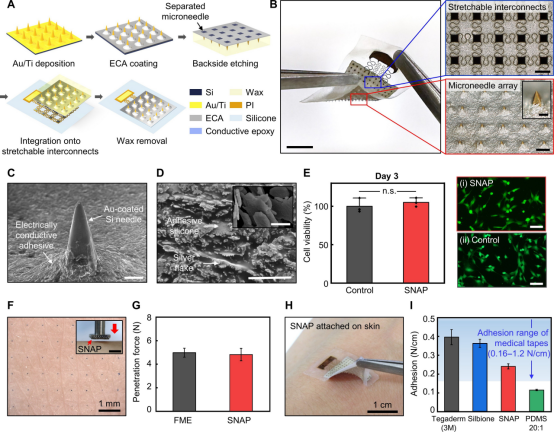
图2展示了SNAP的制造过程、材料特性和机械性能。这些图像包括了完成的SNAP设备的光学图像,显示了其可伸缩的蛇形互连和金(Au)涂层的微针阵列与电气导电胶(ECA)层。通过这些图像,研究者们说明了SNAP确保了直接、生物相容的表皮接触,同时通过ECA层保持了强大的粘附性、高弹性和低接触阻抗。此外,通过碘化处理的银(Ag)片表面粗糙化,提高了ECA的导电性。这些特性使得SNAP在动态运动中保持稳定的皮肤接触阻抗,即使在30%应变下,接触阻抗的增加也小于5千欧姆·平方厘米。这些结果表明SNAP能够在皮肤变形下保持稳定的电气性能,并且其生物相容性和透气性能也得到了验证。总的来说,SNAP的生物相容性、透气性和机械特性表明,它能够为用户提供舒适且对皮肤友好的界面,同时保持与皮肤的紧密接触。
贴体式SNAP的电气特性
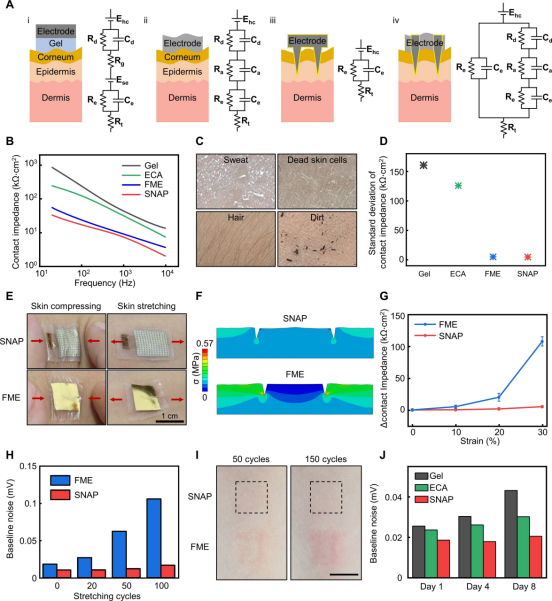
图3描述了SNAP在皮肤上的电气特性。这些图像和图表包括了SNAP与其他电极类型(如凝胶电极、ECA电极和FME电极)在电极-皮肤界面的电路模型比较,以及在不同频率下电极-皮肤接触阻抗的变化。图3还展示了在不同皮肤条件下(如出汗、死皮细胞、头发和污垢)使用不同电生理传感器测量的皮肤接触阻抗的标准差(SD)。此外,还包括了SNAP和FME在皮肤压缩和拉伸时的机械适应性的视觉比较,以及在单轴皮肤应变下微针对周围皮肤组织引起的机械应力的有限元分析(FEA)结果。还提供了在不同拉伸应变下SNAP和FME的皮肤接触阻抗的测量结果,以及SNAP和FME在循环拉伸和释放过程中的基线噪声水平的比较。最后,图3还包括了SNAP和FME在循环拉伸和释放后皮肤表面的视觉图像,以及在8天内使用SNAP、ECA和商业凝胶电极测量的基线噪声水平的比较。通过这些结果,得出的结论是SNAP在皮肤变形和皮肤分泌物的影响下,能够显著降低组织应力和皮肤接触阻抗,同时保持稳定的基线噪声水平,这表明SNAP在动态运动中提供了高保真度的电生理信号测量能力,并且对运动伪影具有良好的免疫力。
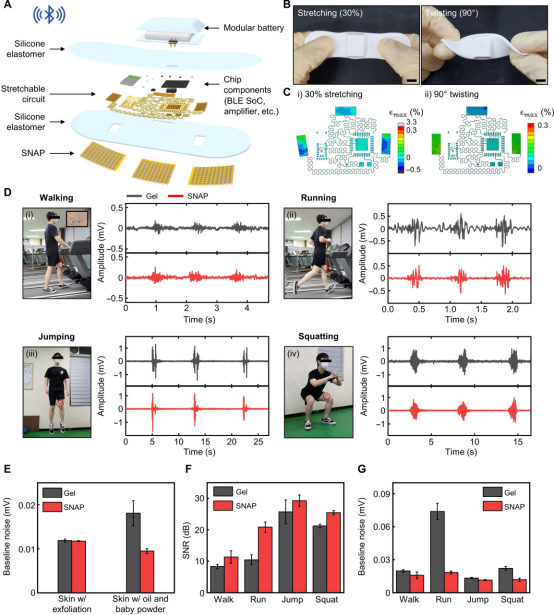
无线SNAP系统,用于在动态运动期间进行可靠的肌电图监测
图4描述了无线SNAP系统在各种动态运动中进行肌电图(EMG)监测的性能。这些图像和图表包括了无线SNAP系统的爆炸视图示意图,展示了其可伸缩的无线电生理信号处理电路和可拆卸的锂聚合物(LiPo)电池,这些组件被柔软、生物相容的弹性体包裹。还展示了设备在拉伸和扭曲时的机械顺应性,以及在不同类型动态运动(如行走、跑步、跳跃和深蹲)期间使用贴片式设备集成凝胶电极和SNAP进行的EMG记录。此外,还包括了在不同皮肤条件下(如预处理和污染皮肤)的EMG信号质量记录,包括基线噪声幅度、信噪比(SNR)值和基线噪声幅度。通过这些结果,可知无线SNAP系统在动态运动中提供了高质量的EMG信号,其基线噪声水平在各种运动和皮肤条件下都得到了显著的抑制,并且对运动伪影的敏感性极低。这表明无线SNAP系统在健康监测、运动员训练、肌肉骨骼康复和人机接口等领域具有广泛的应用潜力。
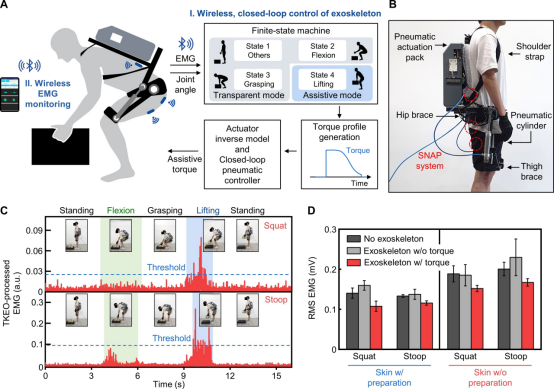
使用无线SNAP系统的外骨骼机器人闭环肌电图控制应用演示
图5描述了使用无线SNAP系统作为人机界面(HMI)来实现外骨骼机器人的闭环EMG控制。这些图像和图表包括了外骨骼机器人的系统架构和控制策略的说明,以及使用无线SNAP系统进行智能假肢、手动劳动辅助和其他HMI领域的外骨骼机器人控制的硬件配置。还展示了在蹲举和弯腰举重过程中,通过SNAP系统监测的EMG信号的实时测量,以及在有和没有机器人辅助的情况下,背部肌肉活动(RMS EMG)的比较。结果表明,SNAP系统在动态人机接口操作中提供了强大的感应接口,即使在皮肤出汗和变形的情况下,也能保持稳定。此外,配备SNAP系统的外骨骼机器人在减轻肌肉疲劳方面表现出积极影响,强调了其在协助需要帮助搬运重物的个体方面提高功能性移动性的潜力。总的来说,将一个无需准备、低轮廓和无线的电生理信号监测系统集成到辅助外骨骼机器人中,为人机接口,特别是在无线假肢控制领域,提供了一个有前景的解决方案,有助于人体的物理增强。
综上所述,该研究探讨了SNAP的概念和设计策略,用于无需皮肤准备的长期电生理信号监测。具有刚性微针的电生理传感器能够轻松穿透皮肤,但可能导致皮肤刺激和皮疹等副作用,因为机械不匹配;而具有软性微针的传感器能够适应组织动态,但可能妨碍强健且均匀的皮肤穿透,这对获取高质量的电生理信号构成挑战。SNAP的刚柔混合结构,包括可穿透的刚性微针阵列和一个柔软、可伸缩的粘附平台,展示了独特的特性,如通过角质层直接接触表皮和组织适应性。这些特性不仅确保了对皮脂分泌和污染的高度免疫,还提供了长时间舒适的佩戴体验。带有ECA(电气导电胶)的SNAP提供了改进的坚固皮肤界面,由于其高导电性和粘附性,与商业凝胶电极相比,其运动伪影和基线噪声显著降低。通过无线闭环操作的外骨骼机器人与SNAP系统的演示,进一步验证了该设备在复杂、现实世界的人机界面(HMI)应用中的实用价值。为了广泛部署,需要研究适合大规模生产的新材料和更简单的制造方法,以降低当前依赖微机电系统(MEMS)过程的制造成本和复杂性。此外,开发具有刚度可调微针的可伸缩电极,这些微针在穿透皮肤时是刚性的,之后变得柔软以适应组织,对于完全消除微针-皮肤界面的机械不匹配至关重要,确保长时间佩戴的舒适感。