


2024
电机控制技术介绍
-EVH1000-

电气区域中的电机控制区域
(瑞萨电子提供)
提高电动汽车电机控制的效率是开发人员关注的重点。从电池中榨取最后一微安的设计技术可以显著提高电动汽车的续航能力,而提高电机控制的效率则可以减少损耗,减少所需的热管理,从而降低电机的复杂性和重量。
所有这些都取决于控制电机的正弦波的质量。正弦波的产生是一项复杂的任务,而且因电机设计而异。任何与完美正弦波的偏差,从锯齿状峰值到可变定时,都会降低为开关晶体管供电的栅极驱动器的输出效率。这些晶体管可以是 IGBT 硅晶体管、碳化硅 (SiC) MOSFET 或氮化镓 (GaN) 晶体管。
在复杂的硬开关拓扑开发过程中,针对这些不同类型的晶体管对控制算法进行了优化。
硬开关是直流-交流电源转换器最常用的技术,但它有许多缺点,其中最大的缺点是晶体管在 "开 "和 "关 "状态之间完全转换时会产生开关损耗。这些损耗占电源转换器损耗的很大比例。

脉宽调制(PWM)是产生正弦波最常用的硬开关技术。每个脉冲的大小和时序构成波形,在工程师的工作台上可以产生合适的正弦波。然而,随着负载、电流、电压和温度的不断变化,很难降低总谐波失真。
电动汽车大多在中低功率范围内驱动,因此减少该范围内的开关损耗将大大提高电池使用时间和行驶里程方面的效率。
SPWM(正弦 PWM)是逆变器技术中最主要的 PWM 技术。脉冲是通过将作为调制信号的参考正弦信号与载波信号进行比较而产生的。载波决定开关频率,调制波决定输出波的频率。载波的频率和振幅高于调制波。
通过改变调制指数(由所产生脉冲的振幅决定),可将谐波失真降至最低。载波频率越高,输出波形越平滑。IGBT 器件的开关频率仅为 10-20 kHz,SIC 可高达 200 kHz,GaN 可高达 2 MHz。
多相电机有许多优点,例如在不增加每相定子电压的情况下,每相电机的扭矩更平稳,定子电流更低。采用九相驱动系统后,每相的定子电流都会降低,从而减小了传统三相系统中使用的笨重组件的体积,并减少了串联大量电池的需要,提高了系统的安全性。
九相机器由九个定子绕组组成,以 400 相移角(3600 ÷ 9)运行。每个绕组都由独立的逆变器供电,逆变器由单独的 PWM 信号触发,相位相差 400º。
当然,九相逆变器由九条腿组成,每条腿由两个串联的半导体晶体管开关组成。这意味着它们位于同一条腿上,并将根据 PWM 信号产生的控制信号处于开启或关闭状态。SiC MOSFET 作为半导体开关用于较高频率的每条腿;模拟负载为星形连接的 RL 负载。
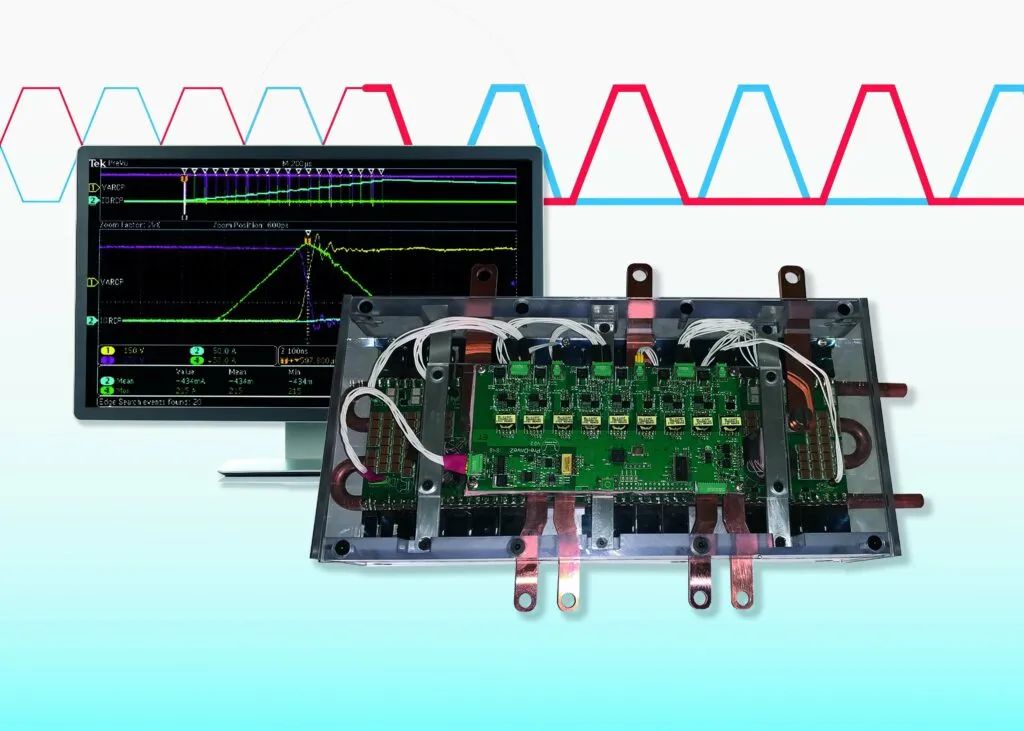
使用机器学习电机控制的 200 千瓦变频器
(由 Pre-Switch 提供)
另一种新的可变开关频率脉宽调制(VSFPWM)策略旨在提高电动汽车逆变器的效率。SiC MOSFET 逆变器具有出色的开关特性,可实现高开关频率的脉宽调制控制。
高开关频率可降低直流链路电容器中的电压纹波,从而使电容器的电容降低。开关频率通常设置在最大输出区域电压纹波的范围内。
由于整个工作区域都采用相同的开关频率,因此在中低输出范围的电压纹波限制方面有足够的余量。VSFPWM 的设计考虑了电容器在负载条件下工作时的电压纹波,从而考虑了实时最小开关频率,将开关损耗降至最低。
此外,由于计算时间短,该方法适用于高开关频率控制。由于它不需要额外的硬件,因此也很容易应用于现有的逆变器。
在逆变器设计中,直流链路电容器、功率半导体、冷却系统、连接器和控制单元分别占功率损耗的 23%、17%、20%、15% 和 25%。SiC MOSFET 的开关性能可以减小冷却系统和直流链路电容器的尺寸。
直流链路电容器的设计应考虑其使用寿命和电容量,而电容量是由电容器电流纹波的均方根(RMS)值决定的。均方根电流纹波与开关频率的关系不大。
直流链路电容器的容量由电压纹波决定。由于电压纹波随开关频率的变化很大,并且与开关频率成反比,因此可以通过提高开关频率来降低电容器的容量。
在负载的最大输出范围内,开关频率可满足电容器的电压纹波条件。当逆变器按照恒定开关频率 PWM 策略驱动时,在低于最大输出的工作范围内,电压纹波与极限值相比有足够的余量。
对于 IGBT 逆变器,即使根据电容器电压纹波裕量实时选择单独的开关频率,可变开关频率的典型范围也仅限于 6-10 kHz。如果能为每个工作范围选择最佳开关频率,就能大大改善开关损耗。
目前正在积极研究 VSFPWM 策略,以提高逆变器效率。
电压纹波是电容器的一个关键设计因素,因为它会对逆变器的控制稳定性和电压利用率产生影响。电压纹波问题还会影响电池的健康状态。
不过,采用这种方法时,需要在逆变器的输入侧增加一个单独的电流传感器,通过对感应电流的积分来观察电压纹波。这就增加了逆变器的成本。
此外,将这种方法应用于基于 SiC MOSFET 的高开关频率 PWM 逆变器并不容易,因为感应电流的模数转换和相关信号处理所需的计算时间会增加。
为了解决这些限制,VSFPWM 策略基于电压纹波的数学模型,不需要额外的硬件,如传感器或电路。电压纹波因数被提前提取并纳入算法。
在运行过程中,开关频率通过预先计算的纹波系数和负载相电流之间的最小计算来确定。由于实时计算最小化,因此计算时间很短,适合应用于基于 SiC MOSFET 的 PWM 逆变器,这种逆变器的开关频率很高。
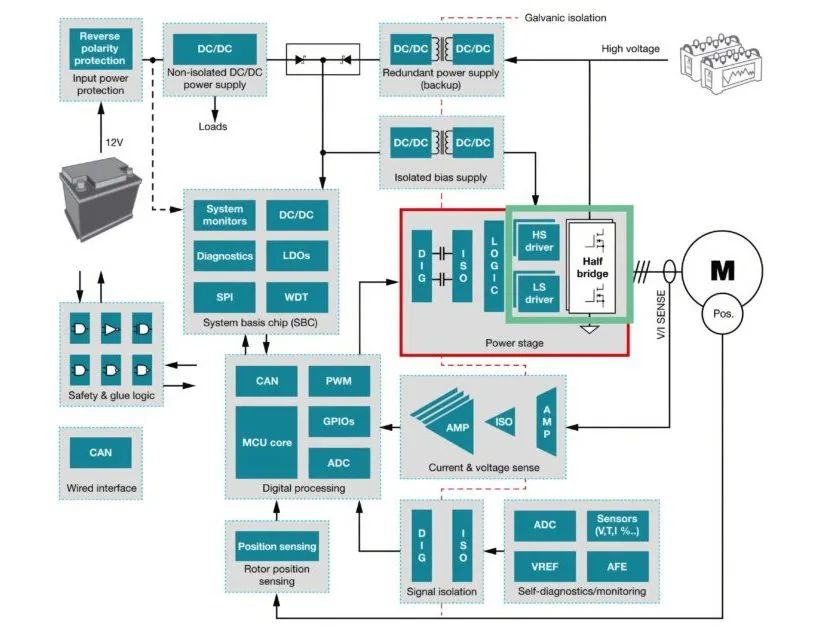
牵引逆变器设计
(德州仪器提供)
产生完美正弦波的一种新兴技术是使用机器学习(ML)进行软开关。这种软开关最大限度地减少了开关损耗,但对于输入电压、温度和负载条件不断变化的直流-交流系统,这种技术还从未成功实施过。
ML 框架已在输入电压、温度和负载条件不断变化的电机和驱动器信号上进行了训练。
训练完成后,该框架可在控制板上运行,并可将典型逆变器的功率输出提高一倍,或将开关速度提高 20 倍。
ML 不断调整开关系统内各元件的相对时间,以强制共振来抵消电流和电压波形,从而将开关损耗降至最低。
这种强制谐振软开关拓扑结构用一块普通的智能控制器板和一个专为 SiC 或 IGBT 晶体管优化的特定谐振功率栅极模块取代了传统的 IGBT 或 SiC 驱动器。
该拓扑是辅助谐振换向极(ARCP)软开关转换器设计的变体,内嵌人工智能,可动态解决复杂的开关系统时序计算,确保在输入电压、输出负载、器件公差和温度变化的情况下实现精确的软开关。在逐个周期的基础上进行调整,以最大限度地减少损耗和提高效率。
这可以减少电机铁芯在巡航扭矩下的损耗,从而将电动汽车的续航里程增加 12%。200 千瓦逆变器参考设计显示,该技术可将系统总开关损耗降低 90% 或更多。
这样,开关频率就比硬开关 IGBT 系统快四到五倍,比硬开关 SiC 和 GaN 系统快 35 倍,而且所需的晶体管数量仅为原来的一半。更高的频率还能提高效率,减小磁性元件的尺寸,从而减轻动力系统的重量。
就基于碳化硅的电动汽车逆变器而言,将开关频率从 10 kHz 提高到 100 kHz 或 300 kHz,可产生近乎完美的正弦波,无需任何输出滤波器,效率可达 99%。 其结果是消除了不必要的电机铁损,提高了电机在低扭矩和低转速时的效率。 更高的开关频率还能使电机转速更高,重量更轻,成本更低。
该逆变器在 100 kHz 时的效率超过 99.3%,仅使用三个分立的低成本 35 mΩ SiC MOSFET,每相一个。
ML 算法可持续预测零电压开关点。控制器逐周期分析多个输入,对小型强制谐振晶体管进行实时调整,从而在恶劣的变化环境中实现完美的软开关。系统温度变化、器件老化、输入电压变化和突发性电流波动都会在 ML 算法中得到考虑和优化。
该算法可在零电压、零电流点控制对电容器充电约 100 ns 的电流。这样就能以每个周期 2 ns 的精度调整开关时间。其他算法可以在功率的某些点上做到这一点,但问题在于无限变化的条件,这就是使用 ML 进行预测的原因。
它接收不完整和嘈杂环境中的数据,并计算出开关的位置。它可以监控设备温度和设备开关速度,并测量其随着时间推移的反应和退化情况,以便让算法对这些变化进行补偿。虽然有一些模式匹配,但算法会逐个周期计算每个晶体管的响应。
评估数据显示,在采用 100 kHz 开关频率的 200 kW 逆变器设计中,开关技术的峰值效率为 99.57%,5% 负载时的效率为 98.5%。
低负载时的效率以及为电机提供的高频正弦波的低失真度是提高 WLTP 范围性能的关键。
IGBT 和 SIC MOSFET 对电机控制的要求相似。 IGBT 在关断状态下需要 -8 V 电压,在接通状态下需要 +15 V 电压,而 SiC MOSFET 的电压略有不同,从接通状态下的 +18 或 +20 V 到关断状态下的 -5 V。如果设计得当,单栅极驱动器足以驱动这两种晶体管。另一方面,氮化镓晶体管需要的驱动器电压范围为 -2 至 -5 或 -6 V,因此需要不同的栅极驱动器设计。
栅极驱动器集成电路必须尽可能高效地开启 SiC FET,同时将开关和传导损耗降至最低,其中包括 "开启 "和 "关闭 "过程中使用的能量,这一过程必须尽可能快速和高效。
控制和改变栅极驱动电流强度的能力可减少开关损耗,但代价是增加开关节点在开关期间的瞬态过冲。改变栅极驱动电流可控制 SiC FET 的压摆率。
栅极驱动电流的实时变化可实现瞬态过冲管理以及整个高压电池能量周期的设计优化。
完全充电的电池,其充电状态从 100% 到 80%,应使用低栅极驱动强度,以尽量减少 SiC 电压过冲。当电池电量从 80% 下降到 20% 时,使用高栅极驱动强度可减少开关损耗并提高牵引逆变器的效率。这些情况在 75% 的充电周期内都有可能发生,因此效率的提高可能相当显著。
20 A 隔离式实时可变栅极驱动器增加了一个高度可配置的可调压摆率栅极驱动器,专门用于驱动大功率 SiC MOSFET 和 IGBT,并尽可能从系统中挤出更多电流。
功率晶体管保护功能,如基于分流电阻的过流、温度传感器和去饱和(DESAT)检测,包括在这些故障期间可选择的软关断或两级软关断。为了进一步缩小电机控制系统的尺寸,驱动器中还集成了有源米勒钳位和有源栅极下拉功能。集成的 10 位 ADC 可监控多达两个模拟输入、电压电源、DESAT 和栅极驱动器温度。
诊断和检测功能的集成简化了 ASIL 安全性设计。
这些功能的参数和阈值可通过标准串行外设接口 (SPI) 进行配置,从而使该器件几乎可与任何 SiC MOSFET 或 IGBT 配合使用。
评估牵引逆变器功率级开关性能的标准方法是双脉冲测试 (DPT),即以不同的电流打开和关闭 SiC 功率开关。改变开关时间可以控制和测量工作条件下 SiC 的开和关波形,从而评估效率和影响可靠性的 SiC 过冲。
表 1 中的结果显示了具有可变强度的 SiC 栅极驱动器如何在最大限度地提高效率和优化热性能的同时控制过冲。
由于栅极驱动电阻和驱动强度是实时控制的,因此波形可以显示可变栅极驱动强度对碳化硅过冲的影响。启用较低的栅极驱动(SiC 关断)可减轻功率级过冲。
根据牵引逆变器的功率水平,强大的栅极驱动可减少碳化硅开关损耗,并显著提高效率。虽然栅极驱动器的选择将通过减少开关损耗来决定功率级的整体效率,但栅极驱动器偏置电源的选择也可以通过限制传导损耗来发挥作用。
使用 WLPT 程序和实际驱动日志速度和加速度设置进行的建模显示,SiC 功率级的效率提高了 2%,相当于每块电池的续航里程增加了 7 英里,对于电动汽车用户来说,每年可增加 1000 英里以上。7 英里可能意味着消费者到达充电器与被困之间的差别。
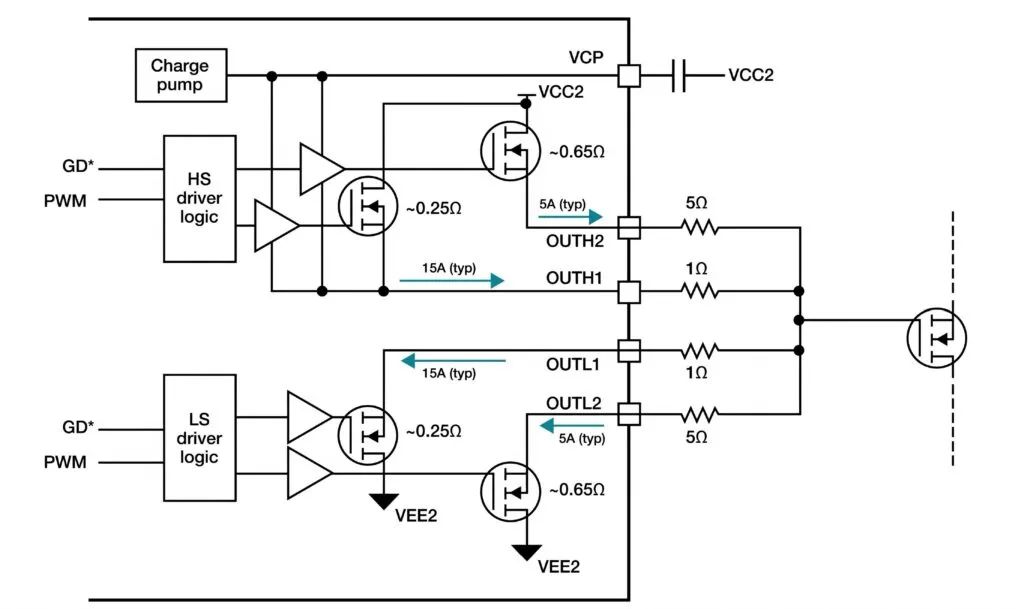
用于电机控制的双输出分裂栅 SiC 驱动器
(德州仪器提供)
为了适应电动汽车电池的更高电压,另一个栅极驱动器内置了 3.75 kVrms(千伏均方根)隔离器,高于以前器件中的 2.5 kVrms 隔离器,可支持耐压高达 1200 V 的功率器件,适用于 800 V 和 1000 V 的电池组。这就在初级电路(微控制器侧)和次级电路(IGBT 侧)之间提供了高压隔离的数据传输。
该驱动器可将 CMTI(共模瞬态抗扰度)性能提升至 150 V/ns 或更高,从而在满足逆变器系统所需的高电压和快速开关速度的同时,提供可靠的通信和更高的抗噪能力。栅极驱动器采用小型 SOIC16 封装,适用于较小的逆变器系统。
对于重型越野电动汽车,双通道栅极驱动器的工作电压高达 1000 V。集成 NTC 读出器的电隔离 IGBT 模块可提供 IGBT 模块温度信息。
它支持高达 20 kHz 的 PWM 开关频率,在最高环境温度下每通道功耗为 1.5 W。
电机驱动器输出的 PWM 使得捕获信号的稳定测量结果具有挑战性。 手动确定滤波器和触发器的正确组合以实现稳定的波形非常困难,但这是实现一致测量的先决条件。
除了测量驱动器的输出之外,评估驱动器输入级性能(例如谐波、功率和功率因数)的测量也很重要。 虽然可以将原始波形导出到电子表格或其他分析软件中,但该过程非常耗时,并且在设计计算时需要小心。
测量涉及与被测设备的许多连接。 电机驱动系统的不正确探测和连接完整性不良是电机驱动测量中常见的错误来源。
机械测量也很关键,可以使用传感器进行。 然而,如果不进行定制处理和缩放,就很难或不可能以工程单位测量速度、加速度或扭矩。
由于这些原因,使用示波器全面了解电机驱动系统需要仔细的设置、稳定的波形和强大的测量算法。

HVi F5-R 型为三相交流感应和永磁交流 (PMAC) 电机提供精确的速度和扭矩控制
(图片由柯蒂斯仪器公司提供)
更先进的交流感应电机和同步电机驱动器使用矢量驱动技术。 它们比标量驱动器更灵活、更高效,但也更复杂。
矢量驱动器与标量驱动器有相似之处,即它们通过正弦电流驱动电机。 然而,矢量驱动器提供更平稳的操作、更快的加速和卓越的扭矩控制。 这些控制系统通常使用两个正交矢量的磁场定向控制,其大小与电机内的扭矩和磁通量相关。
控制系统必须测量转子的位置以便使系统同步。 这通常通过使用霍尔传感器或正交编码器接口等传感器来完成。 (也使用无传感器系统,其中控制系统使用电机的反电动势来确定转子位置。)控制器使用 Clarke 和 Park 变换来计算矢量的幅度,然后使用这些值作为控制环路的设定点 。
电机驱动测量涉及相对较高的电压。 例如,480 VAC 三相电机驱动器中的直流总线电压通常约为 680 VDC,而共模电压也可能相对较高。
磁场定向电机控制算法可在所有工作条件下保持三相交流电机的最佳性能。 实时电机扭矩和功率估算通过结合定制的磁场定向控制算法和 PWM 开关来优化电机功率,从而在整个扭矩/速度范围内提供扭矩和系统效率。
双核微控制器可以允许在电机控制器上运行额外的代码以充当系统控制器,从而无需昂贵的额外控制器。 这特别适用于物料搬运卡车、移动式升降工作平台、机场圆形支撑和建筑设备等设备。
变频驱动器 (VFD) 的输入和输出通常都使用三相。 然而,汽车驱动系统使用的一些 VFD 可能由单相交流或直流供电。 此外,三相系统可以采用两种配置进行接线和建模:星形和三角形。
接线配置决定了功率分析中使用的计算,因此了解并选择正确的接线配置以获得预期结果非常重要。 这些配置适用于电机驱动器的输入和输出。
尽管只需要两个瓦特表来测量三线系统中的总功率,但使用三个瓦特表也有优势。 三瓦特表配置需要六个示波器通道:三个电压和三个电流。
这种 3V3I 配置提供单独的相电压和每个单独相的功率,这是两瓦特表配置所不具备的。
对于使用 3V3I 测量的三线系统,IMDA 软件包括将线间 (L-L) 电压转换为线间 (L-N) 电压的设置。 尽管该系统中没有物理中性点,但可以从瞬时线间电压确定瞬时线间电压。
这种逐点 LL-LN 转换表示相对于单个参考的所有电压,并校正每个相位的电压和电流之间的相位关系。 打开 LL-LN 转换可以通过相乘相电压和相电流来计算瞬时功率。
在线路和驱动器之间或驱动器和电机之间使用中性导体的系统中,需要三个电压通道和三个电流通道来测量总功率。 电压都是相对于中性线测量的。 可以使用矢量数学根据相电压幅值和相位准确计算相电压。
建议使用具有三相自动设置功能的示波器内置软件,该软件可根据所选接线配置自动配置电压和电流源。 它将在示波器上最佳地设置垂直、水平、采集和触发参数,并且可以对所有有功功率测量进行测量。
这极大地简化了测量设置,特别是对于 VFD 输出上的 PWM 波形,从而实现更快、更准确的测量。
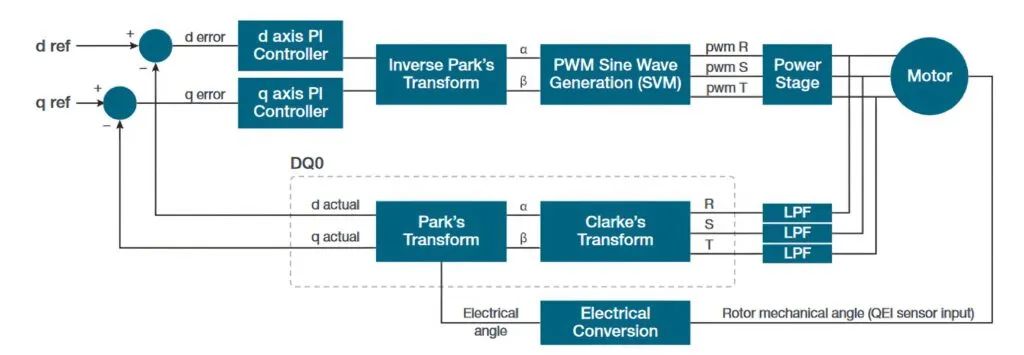
矢量控制系统框图
(泰克公司提供)
在控制器中使用机器学习的另一个优点是能够利用关键的远程监控和诊断。
嵌入式数字示波器使设计人员能够准确诊断远程发生的情况,然后在现场进行调整。 这为开发人员提供了 12 个通道和 160 Msamples/秒的能力来分析切换时序。 可以记录并导出跟踪以查看系统的运行情况。
这使开发人员能够了解电机控制系统中发生的情况,以便采取行动。 将来,可以使用电机控制器中嵌入式示波器的反馈来实施预防性维护计划。
尽管软开关的想法并不新鲜,但以前不可能在输入和输出条件连续变化的逆变器中实现它。
创建完美的正弦波是电动汽车电机控制的关键挑战。 人们正在开发更多的技术来提高电机的效率,但测量信号也面临着相关的挑战。
新的 PWM 调制方案和多相设计可以提高效率,但实施起来可能更复杂且成本更高。 ML 被应用于电机控制信号,以将电机效率提高到 99% 以上,同时降低逆变器的复杂性。
机器学习方法还使嵌入式示波器能够提供更详细的信号视图,甚至可以预测电机的行为方式。 当信号波动超出预期范围时,这可以警告逆变器和电机系统中其他地方的问题,预测潜在问题并能够在灾难性逆变器或电机故障之前安排维护。
来源:emobility-engineering
END
关注我们
/ About us /

欢迎加入新能源汽车产业交流群
关注公众号后台回复关键词“社群”
即可获取入群方式
扫码报名咨询

参会详情咨询

联系人:张晚晚
电话:13671990811

点击“阅读原文”,立即报名咨询!
【免责声明】文章为作者独立观点,不代表电动车千人会立场。如因作品内容、版权等存在问题,请于本文刊发30日内联系电动车千人会进行删除或洽谈版权使用事宜
