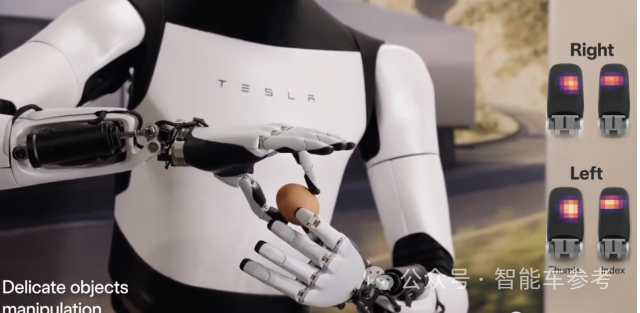
人形机器人,解锁了新的技能。
马斯克发了一段视频,视频显示,特斯拉的机器人擎天柱(Optimus)已经会自己叠衣服了。
虽然叠衣服速度很慢,但已经让网友畅想起了机器人给自己端茶倒水的美好未来。
不过,马斯克随后就给网友“泼冷水”了。
看来尽管学界和工业界的机器人都取得了新的进展,但显然他们“还没有准备好接管这个世界”。
马斯克发布了一段视频:
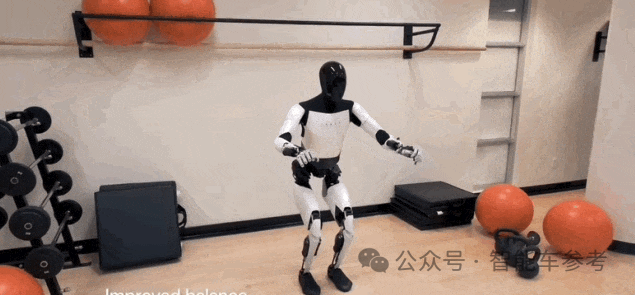
在视频中,特斯拉的机器人擎天柱流畅地完成了叠衣服的动作,人形机器人解锁新技能,一时震惊网友。
乐观派网友开始畅想起了美好未来:机器人帮自己做家务,自己只需要往沙发上腿一翘。

而有网友则联想到电影《终结者》,先是“征服”衬衫,然后“征服”人类:
机器人现在这么牛了?
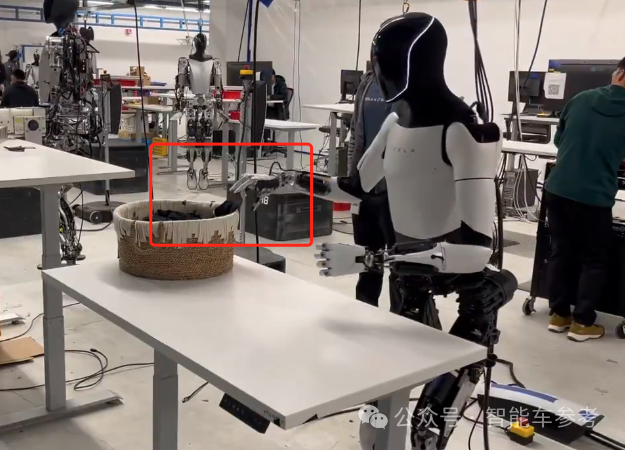
有网友很快发现了问题,叠衣服慢倒没什么,视频中的擎天柱露出了“机脚”:
右下角不时会晃过一个机械臂,运动轨迹和擎天柱叠衣服相同,疑似是被遥控完成的叠衣服。

而且明显可以看到,和不久前表演瑜伽的擎天柱不一样,叠衣服的机器人后面有根电线:
马斯克随后自曝,擎天柱目前确实不能自主完成叠衣服的动作,不过他表示未来擎天柱能够做到,而且强调是任意环境。
回顾视频会发现,擎天柱是在桌子上叠的衣服。
对人类来说,在哪儿叠衣服,旁边放没放别的杂物,都一样。但对机器人来说,在桌子上叠衬衫,背景单一,附近还没有其他干扰项。识别起要操作的物体会更简单。
公布的视频中,就一张桌子,而且仔细观察,从筐里拿衣服时衣服一角已经从筐中伸了出来,机器人无需再去筐中摸索。
特斯拉尽可能地简化了叠衣服的整套流程。所以目前来看,只是验证了擎天柱的身体关节具备完成一项家务的可行性。
不只特斯拉,从加州到杭州,从学术界到工业界,机器人最近都取得了新的进展。
暂且把目光停留在大洋彼岸,前几天斯坦福大学的一段视频火了,也是机器人,也是做家务,不过却是“翻车集锦”:
看似能娴熟地浇水、擦杯子和打鸡蛋,结果这背后却是一连串的翻车。项目参与者主动曝光了失败情况,并揭开了内幕:

原来背后大部分都是真人操控,不过在真人示范后,一些简单的动作学习50次,机器人就可以做到90%的成功率。
再来看国内,西湖大学公开的宣传视频显示,四足机器人目前能完成前进,后空翻,打滚和上楼梯等动作:
将锚定科研、电力、商场和机场等领域,将推出的双足机器人则瞄准了制造和仓储搬运,还会搭载大模型。
和特斯拉擎天柱类似的人形机器人,在国内原华为“天才少年”稚晖君创办的智元机器人也在做:
造车新势力小鹏在去年的1024技术日上也曝光了最新成果PX5,将感知和汽车打通,据何小鹏介绍可以陪他打牌:

所以总体来看,正如从业者曾提出的,仿生机器人整体还处于“诺基亚时刻”,单点技术并没有走向成熟,短期也不会出现如乔布斯这样的技术整合者。
那么都面临哪些方面的挑战?
可分为感知,运动,交互等方面。
感知上,仿生机器人要首先能感知周围环境甚至理解人类的语言,从而做出相应行为。
在感知周边环境后,机器人会运动,拿基本的走路来说,目前很多机器人项目还都处于“盲走”,走平地还行,上楼梯就没辙了。软件算法感知不出地面细节,感知出来了硬件上机器人关节设计也执行不了相应动作。
同时还要考虑和环境的交互,比如拿杯子这一动作,机器人识别到了衣服,做出了运动规划,能够拿到这个杯子,但是拿杯子时要多大的力?这点是从视觉上无法估计的,因此不光要依靠数据驱动,还要在交互时考虑物理参数。
以及面对复杂环境,做出决策和动作,要求更强的软件算法。但算法的进步又受限于芯片算力。
所以特斯拉的擎天柱,完成叠衣服只是验证了动作和交互的可行性,但很明显降低了感知的难度,而且整个过程还不是完全自主的。
人形机器人的前路还很长,但目前可以感受到,汽车和机器人正在走向融合,小鹏亲自下场,李彦宏则干脆提出了“汽车机器人”的概念,联合吉利创立极越。
比亚迪则投资了稚晖君的智元机器人,同时联合创始人夏佐全还是另一家机器人公司优必选的天使投资人,除创始人外第一大个人股东。目前优必选已上市,成为“人形机器人第一股”。
— 完 —
智能车2023年度评选倒计时!
作为以智能维度关注汽车产业的内容平台,作为智能车领域最具影响力的社区,智能车参考每年以年度盘点和评选的方式,为从业者和广大读者提供参考和注脚。
本次评选截止时间为:2024年1月26日

— 联系作者 —
【智能车参考】原创内容,未经账号授权,禁止随意转载。
点这里👇关注我,记得标星,么么哒~
