循环缓冲区FIFO在嵌入式开发中非常常见,比如串口的收发驱动,协议包的接收等都会用到,这一篇我们就来实现一个自己简单的循环FIFO的”轮子”。
定义FIFO数据结构
/*** \struct fifo_st* FIFO缓冲区结构.*/typedef struct{uint32_t in; /**< 写入索引 */uint32_t out; /**< 读出索引 */uint32_t len; /**< 有效数据长度 */uint32_t buffer_len; /**< 有效长度 */uint8_t* buffer; /**< 缓存,用户分配 */} fifo_st;
写入和读出接口
/*** \fn fifo_in* 往fifo里写数据* \param[in] dev \ref fifo_st* \param[in] buffer 待写入的数据* \param[in] len 待写入的长度* \retval 返回实际写入的数据量*/uint32_t fifo_in(fifo_st* dev, uint8_t* buffer, uint32_t len);/*** \fn fifo_out* 从fifo读出数据* \param[in] dev \ref fifo_st* \param[in] buffer 存读出的数据* \param[in] len 需要读出的数据长度* \retval 返回实际读出的数据量*/uint32_t fifo_out(fifo_st* dev, uint8_t* buffer, uint32_t len);
实现思路详见注释。
写入
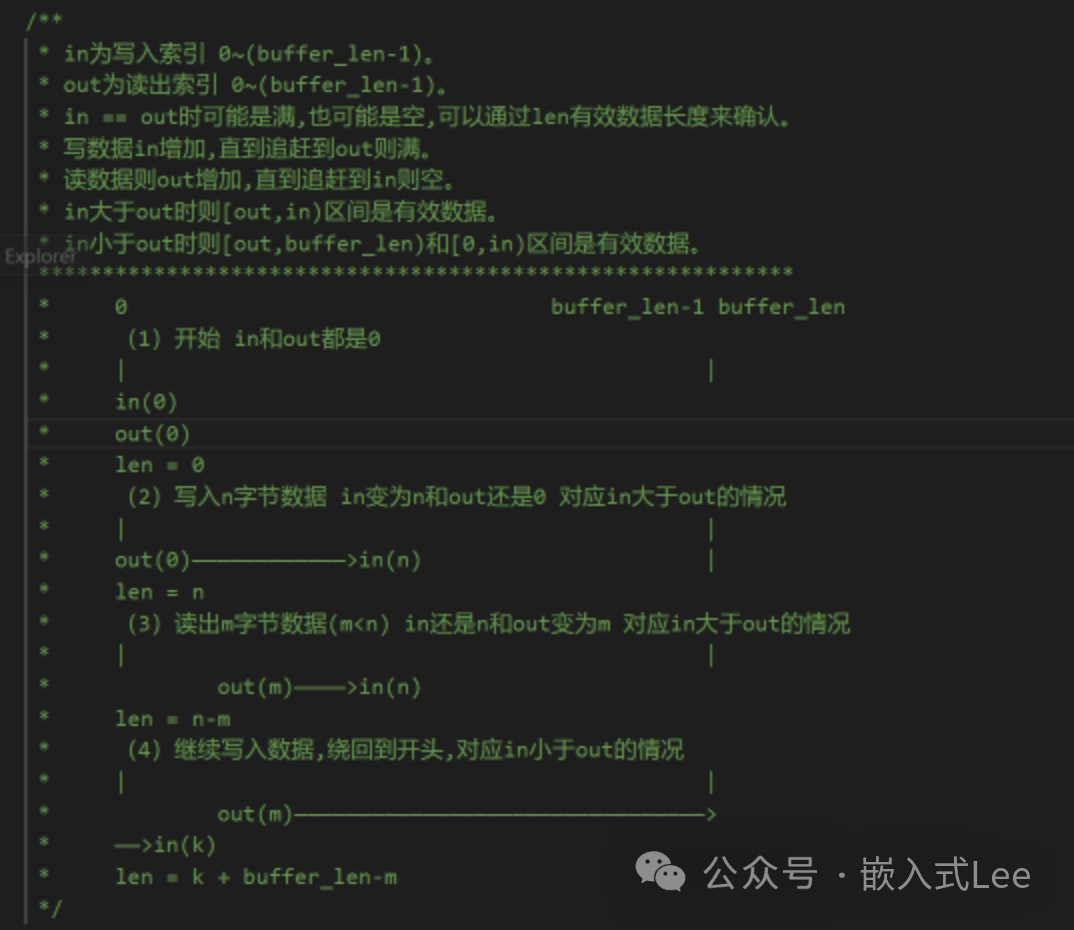
/*** in为写入索引 0~(buffer_len-1)。* out为读出索引 0~(buffer_len-1)。* in == out时可能是满,也可能是空,可以通过len有效数据长度来确认。* 写数据in增加,直到追赶到out则满。* 读数据则out增加,直到追赶到in则空。* in大于out时则[out,in)区间是有效数据。* in小于out时则[out,buffer_len)和[0,in)区间是有效数据。************************************************************ 0 buffer_len-1 buffer_len* (1)开始 in和out都是0* | |* in(0)* out(0)* len = 0* (2)写入n字节数据 in变为n和out还是0 对应in大于out的情况* | |* out(0)————————————>in(n) |* len = n* (3)读出m字节数据(m* | |* out(m)————>in(n)* len = n-m* (4)继续写入数据,绕回到开头,对应in小于out的情况* | |* out(m)————————————————————————————————>* ——>in(k)* len = k + buffer_len-m*/uint32_t fifo_in(fifo_st* dev, uint8_t* buffer, uint32_t len){uint32_t space = 0; /* 用于记录空闲空间大小 *//* 参数检查 */if((dev == 0) || (buffer == 0) || (len == 0)){return 0;}if(dev->buffer == 0){return 0;}/* 限制len的最大长度为buffer大小 */if(len > dev->buffer_len){len = dev->buffer_len;}/* 计算空闲空间大小* 正常dev->len不应该大于dev->buffer_len*/if(dev->buffer_len >= dev->len){space = dev->buffer_len - dev->len;}else{/* 这里不应该出现, 出现则是异常 */dev->len = 0;space = dev->buffer_len;}/* 计算待写入大小, 如果len大于剩余空间则只写入剩余空间大小 */len = (len >= space) ? space : len;if(len == 0){return 0; /* 这里有可能无剩余空间,直接返回 */}/* 计算len的长度是否需要有绕回,需要分次写入 */space = dev->buffer_len - dev->in; /* 当前写入位置in到缓存末尾剩余可写入空间 */if(space >= len){/* 当前写入位置in到缓存末尾足够一次写入 */memcpy(dev->buffer+dev->in,buffer,len);}else{/* 当前写入位置in到缓存末尾不够,还需要绕回到前面写 */memcpy(dev->buffer+dev->in,buffer,space); /* 先写入tail部分 */memcpy(dev->buffer,buffer+space,len-space); /* 再写入绕回头部分 */}/* 更新写入索引和有效数据长度 */dev->in += len;if(dev->in >= dev->buffer_len){dev->in -= dev->buffer_len; /* 判断加减法 替代 dev->in %= dev->buffer->len */}dev->len += len; /* dev->len最大dev->buffer->len,无需%= dev->buffer->len */return len;}
读出
uint32_t fifo_out(fifo_st* dev, uint8_t* buffer, uint32_t len){uint32_t space = 0;/* 参数检查 */if((dev == 0) || (buffer == 0) || (len == 0)){return 0;}if(dev->buffer == 0){return 0;}/* 判断是否有数据 */if(dev->len == 0){return 0;}/* 可读出数据量取需要的和有的之间的小值 */len = (dev->len) > len ? len : dev->len;/* 计算len的长度是否需要有绕回,需要分次读出 */space = dev->buffer_len - dev->out; /* 当前读出位置out到缓存末尾剩余可读出空间 */if(space >= len){/* 当前读出位置out到缓存末尾足够一次读出 */memcpy(buffer,dev->buffer+dev->out,len);}else{/* 当前读出位置out到缓存末尾不够,还需要绕回到前面读 */memcpy(buffer,dev->buffer+dev->out,space); /* 先读出tail部分 */memcpy(buffer+space,dev->buffer,len-space); /* 再读出绕回头部分 */}/* 更新读出索引和有效数据长度 */dev->out += len;if(dev->out >= dev->buffer_len){dev->out -= dev->buffer_len; /* 判断加减法 替代 dev->out %= dev->buffer->len */}dev->len -= len; /* 这里dev->len 不可能小于len,不会溢出 */return len;}
fifo_test.c
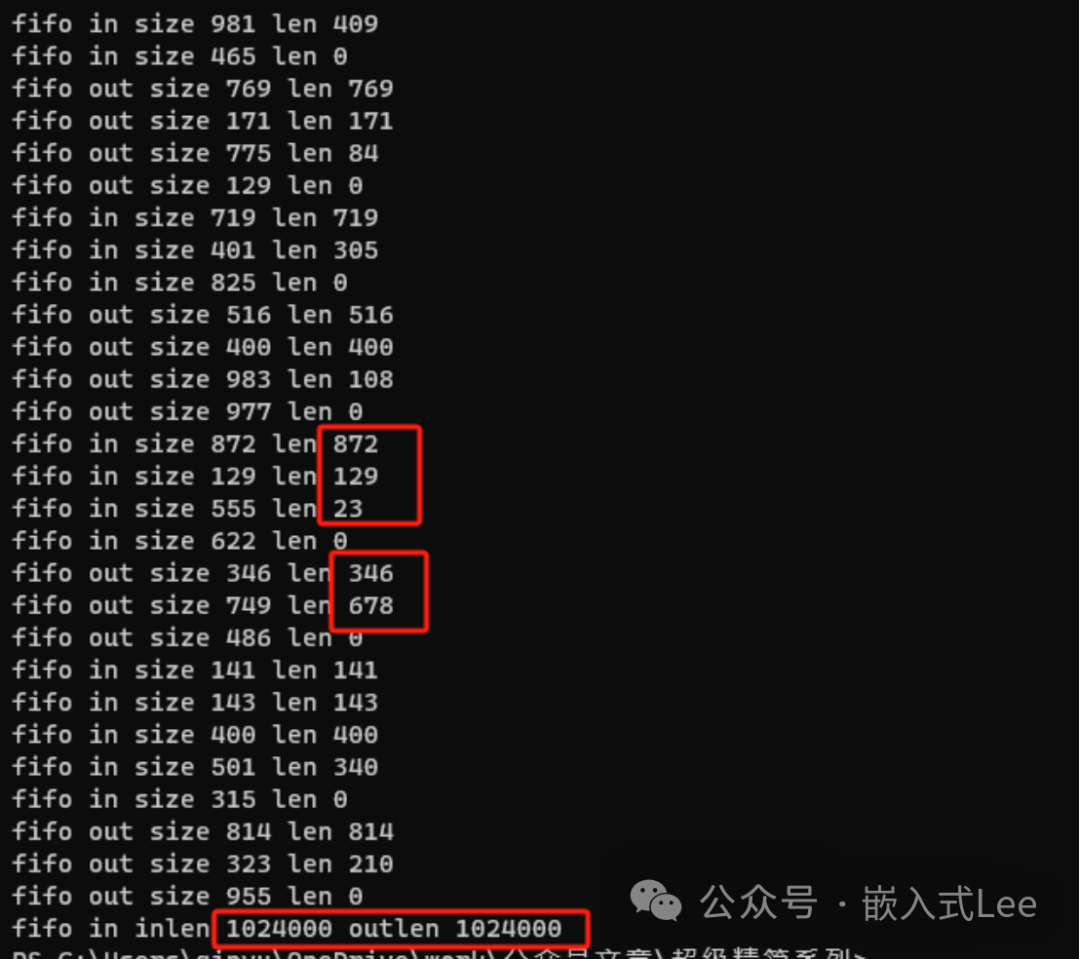
不断往fifo写入随机个数数据,然后随机个数读出,最后看是否写入读出数据个数一样。
代码如下:
uint8_t fifo_buffer[1024];fifo_st fifo_dev={.in=0,.out=0,.len=0,.buffer_len=sizeof(buffer);.buffer=fifo_buffer};int getrand(int min,int max){return rand()%(max-min) + min;}int main(void){uint8_t buffer[1024];uint32_t size;uint32_t len;uint32_t inlen=0;uint32_t outlen=0;for(int i=0; i<1000; i++){do{size = getrand(1,sizeof(fifo_buffer));len = fifo_in(&fifo_dev, buffer, size);printf("fifo in size %d len %d \r\n", size, len);} while(len > 0);do{size = getrand(1,sizeof(fifo_buffer));len = fifo_out(&fifo_dev, buffer, size);printf("fifo out size %d len %d \r\n", size, len);} while(len > 0);}printf("fifo in inlen %d outlen %d \r\n", inlen, outlen);return 0;}
编译gcc fifo.c fifo_test.c -o fifo.c
运行./fifo.exe
可以看到写入多次总共1024字节,读出多次总共1024字节,最后总的写入读出数一致。
注意以上仅仅实现FIFO本身,实际应用在多线程,或者前后台(中断和主循环)中访问FIFO,需要做临界段保护。可以根据具体环境封装一层即可。
