现在市面上涌现了一批智能避障手势感应四轴飞行器小玩具,在没有实物参考,也没有任何资料参考的情况下,我们可以尝试通过自己的理解来把它的原理图设计出,锻炼自己的设计能力。有时候严格要求一下自己,对自己狠一点,可以激发自己无限的潜力。下面我们来开始这一种四轴飞行器小玩具原理图的设计之旅吧。首先我们先来分析这一种四轴飞行器有哪些功能,然后总结出它的硬件要求。这种四轴飞行器玩具可以在空中悬停,所以它应该是用到了陀罗仪;它除了可以在室外飞行,也可以在室内飞行,能感应手势,其它这些就是它的避障功能。至于它用什么传感器来实现的,我们可以这样来分析。因为它是一个低端的小产品,所以它的成本不会很高,从我以往的经验来看,能够实现避障功能且价格又低的传感器只有红外对管了,如果是用红外对管做避障的话,那么就要用到6组红外对管才能实现全方位的避障,不然就很难在室内自由地飞翔,因为室内四周有墙壁,上面有天花,地上有桌子,所以要在前后左右上下各装一组对外对管来实现避障。
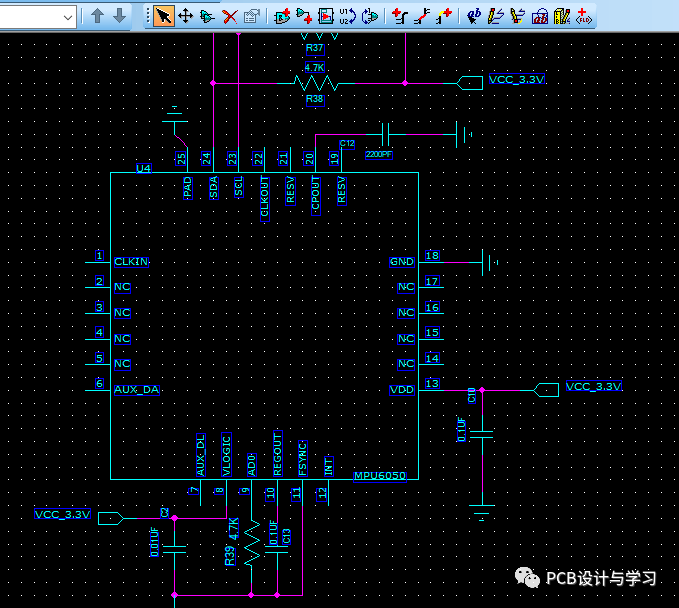
一,悬停功能方案选择,主要是选择陀罗仪。在这里我选用以前用过三轴加速度计和三轴陀螺仪姿态传感器。参考电路如下:
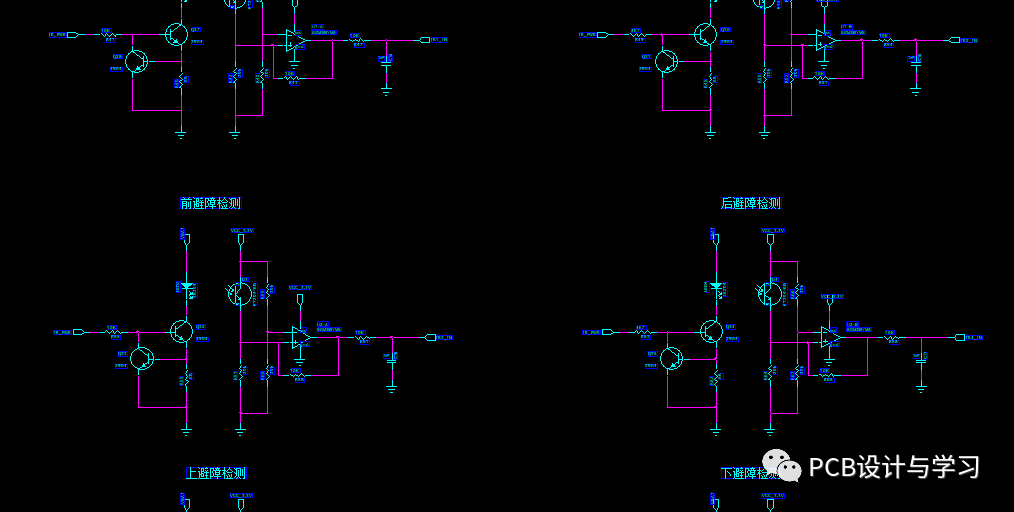
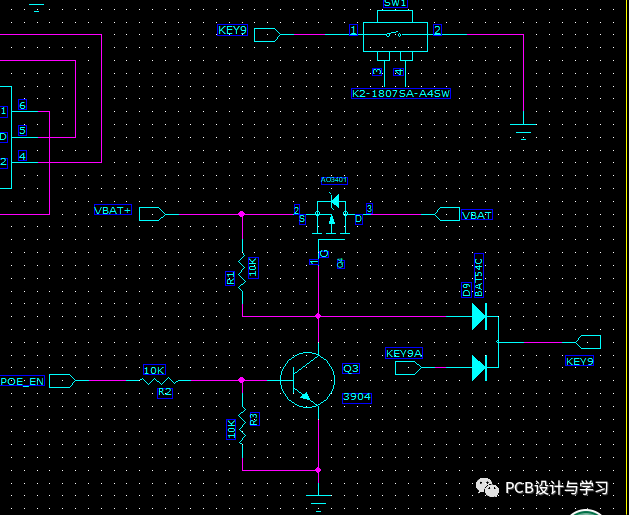
二,避障功能电路设计,选用6组红外对管,电路设计如下:
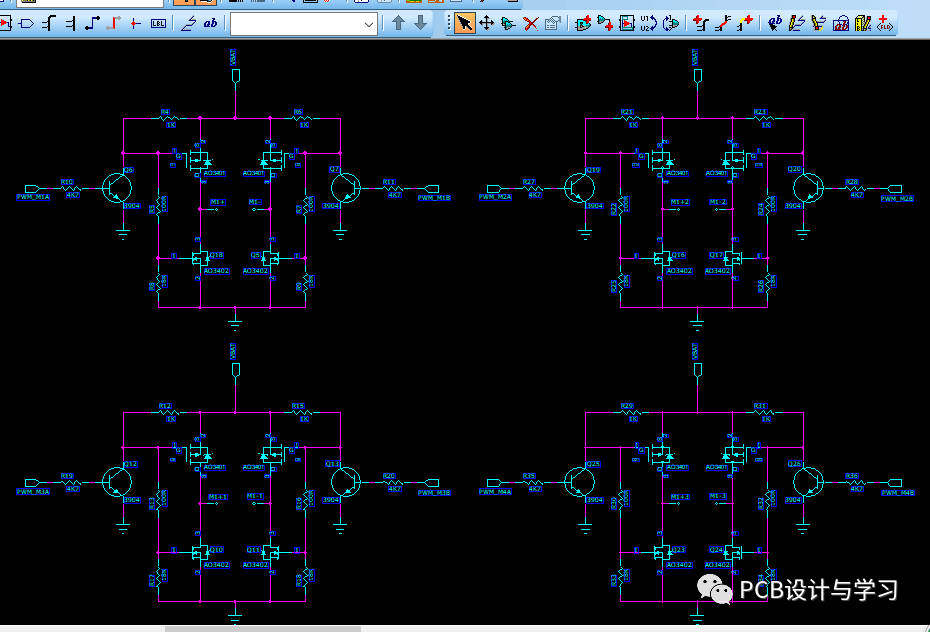
三,电机驱动,要实现4个电机的正反转,在这里从成本的角度考虑,不宜选用电机驱动芯片,所以选用分立器件搭H桥来控制。参考电路如下:
四,电池的选择,因为是小飞行器,对自身的重量有严格要求,不能过重,所以电池要选尺寸小,重量轻的,这里打算选用100mAh的锂电池。
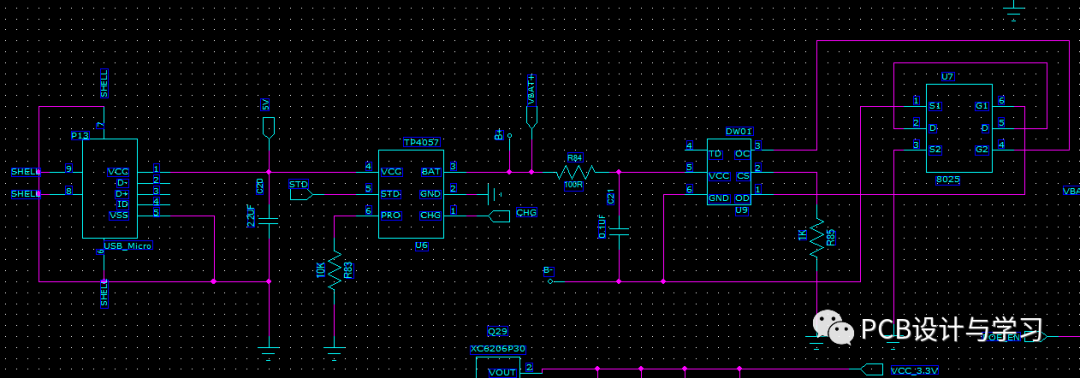
五,充电电路的设计,这里选用100mA充电电路对100mAh的锂电池,大约一个小时充满电,充电口选用MICRO USB,用安卓线插电脑就可以实现充电,另外我把电池的保护电路也设计进去了,充电参考电路如下所示:
六,开机方式,选用轻触按键,长按开关机,参考电路如下:
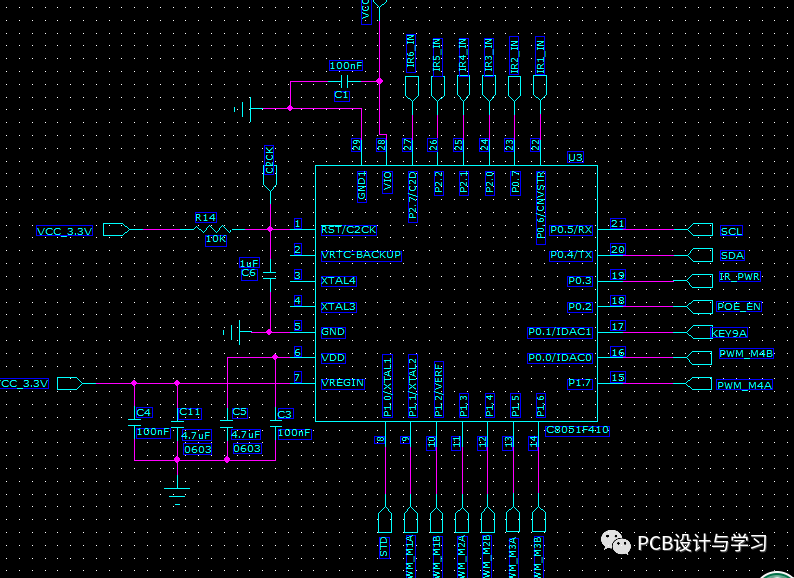
七,单片机选型,主要是考虑IO口的数量。通过上面的分析可以知道,此电路需要用到的IO口比较多,电机驱动方面需要用到8个IO口,其中每个电机用到2个IO,一个控制正转,一个控制反转;避障电路用到7个IO,一个IO控制6个红外发射管,另外6个IO是6个红外接收管的接收输入。陀罗仪还在用到两个IO口做模拟I2C接口,还有开机电路要用到两个IO口,充电满电检测一个IO口,所以我选了以下IO口比较多的单片机:
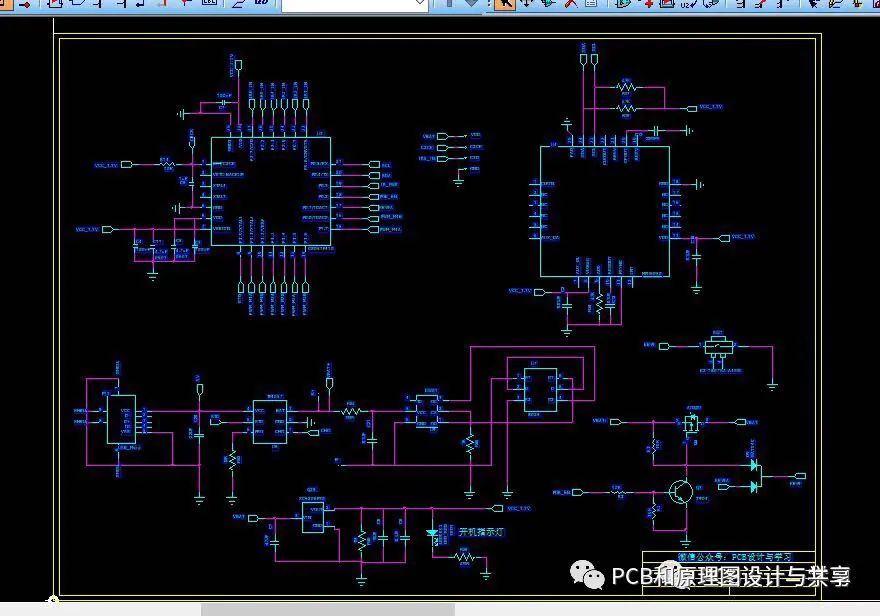
以上是设计完成的智能避障四轴飞行器原理图,感兴趣的朋友,可以在公众号主页回复“智能避障四轴飞行器原理图",即可获得下载链接,或者在群里下载。

扫码关注我
一起感悟科学魅力

点分享

点收藏

点点赞

点在看
