

前面实现了IO模拟SPI接口,并且以W25Q32FV为例进行了状态寄存器的读写,使用逻辑分析仪测试了不同MODE的不同操作的波形。
现在继续在此基础上类似之前的IO模拟IIC,实现EEPROM读写,实现EEPROM编辑器工具。
现在使用IO模拟SPI,实现SPI FLASH的读写,实现SPI FLASH编辑器的工具。这样我们的瑞士军刀工具集又添加一项新的功能。
写需要先使能,之前已经实现且测试过了。
SPI FLASH的命令非常多可以参考手册,但是实现读写实际只需要写使能,读状态寄存器,之外3条基本命令,sector擦除,page编程和读数据。
先来了解下这些命令的时序,按照着时序实现驱动。
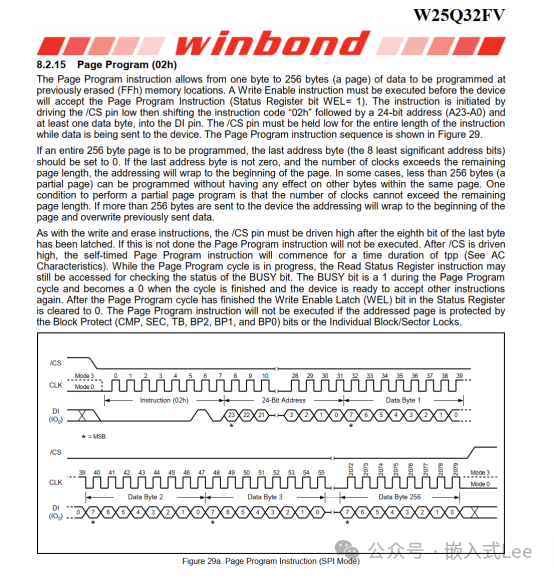
可以看到只需要拉低CS,然后发送page编程命令0x02,然后是3字节 24位的地址,然后是最多256字节的数据(假设从page 偏移0开始)。超过page最大偏移256字节则会绕回。
于是实现代码就很简单了
int w25qxx_page_program(w25qxx_dev_st* dev, uint32_t addr, uint8_t* buffer, uint32_t size, uint8_t wait){int res;uint8_t s0 = 0xFF;uint8_t tx[4];if(dev == 0){return -1;}w25qxx_wr_enable(dev); /* 先写使能 *//* 命令和地址 */tx[0] = CMD_PAGE_PROGRAM;tx[1] = (addr >> 16) & 0xFF; /* A23~A16*/tx[2] = (addr >> 8) & 0xFF; /* A15~A8 */tx[3] = (addr >> 0) & 0xFF; /* A7~A0 */dev->enable();res = dev->trans(tx,0,4);/* 数据 */res = dev->trans(buffer,0,size);dev->disbale();/* 等待完成 */if (wait != 0){do{w25qxx_rd_sr(dev, 0, &s0);}while((s0 & 0x01) != 0);}return res;}
为了方便后面sector操作还可以基于此实现sector的编程
/** 完整的sector写入*/static int w25qxx_sector_program(w25qxx_dev_st* dev, uint32_t addr, uint8_t* buffer){int res = 0;if((dev == 0) || (buffer == 0)){return -1;}if((addr % dev->sectorsize) != 0){return -1; /* 必须sector大小对齐 */}for(uint32_t i= 0; isectorsize/dev->pagesize; i++) {/* 循环一个sector的page数 */res = w25qxx_page_program(dev, addr+i*dev->pagesize, buffer+i*dev->pagesize, dev->pagesize, 1);}return res;}
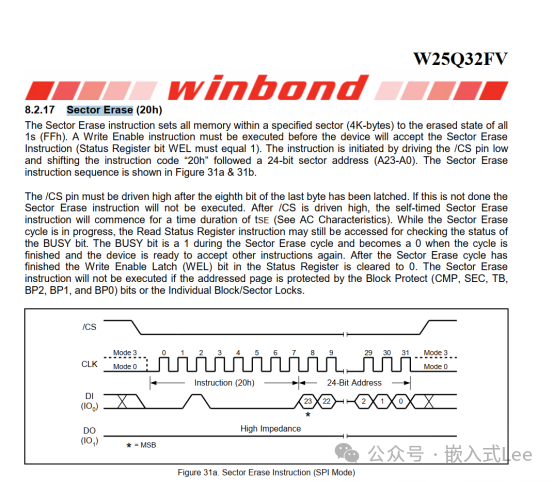
也很简单,拉低CS发送命令0x20,发送3字节地址,拉高CS即可。
实现代码如下
int w25qxx_sector_erase(w25qxx_dev_st* dev, uint32_t addr, uint8_t wait){int res;uint8_t s0 = 0xFF;uint8_t tx[4];if(dev == 0){return -1;}w25qxx_wr_enable(dev); /* 先写使能 *//* 擦除 */tx[0] = CMD_SECTOR_ERASE;tx[1] = (addr >> 16) & 0xFF; /* A23~A16*/tx[2] = (addr >> 8) & 0xFF; /* A15~A8 */tx[3] = (addr >> 0) & 0xFF; /* A7~A0 */dev->enable();res = dev->trans(tx,0,4);dev->disbale();/* 等待完成 */if (wait != 0){do{w25qxx_rd_sr(dev, 0, &s0);}while((s0 & 0x01) != 0);}return res;
支持随机地址任意长度读。
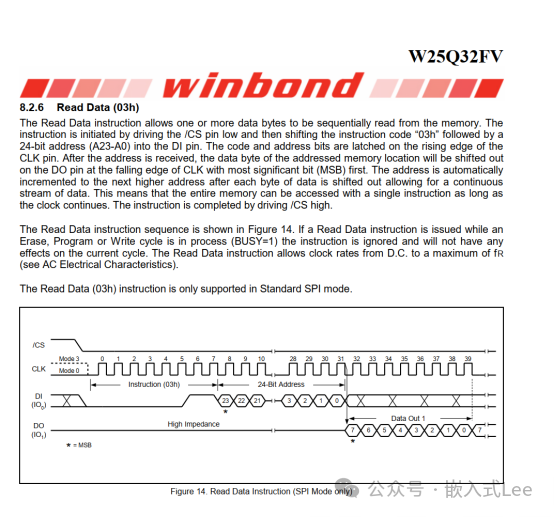
只需要先拉低CS,发送命令0x03,然后24位地址,然后连续读即可。
int w25qxx_read_data(w25qxx_dev_st* dev, uint32_t addr, uint8_t* buffer, uint32_t size){int res;uint8_t tx[4];if((dev == 0) || (buffer == 0)){return -1;}/* 命令和地址 */tx[0] = CMD_READ_DATA;tx[1] = (addr >> 16) & 0xFF; /* A23~A16*/tx[2] = (addr >> 8) & 0xFF; /* A15~A8 */tx[3] = (addr >> 0) & 0xFF; /* A7~A0 */dev->enable();res = dev->trans(tx,0,4);/* 数据 */res = dev->trans(0,buffer,size);dev->disbale();return res;}
前面的page编程,sector 擦除,读数据都是原生支持的操作。
但是对于写则需要一定的处理,因为flash写之前需要erase擦除,而擦除最小单位是sector,
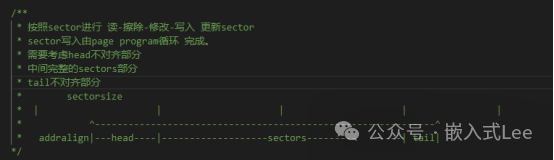
所以任意写也必须要要以sector为单位, 需要:读- 擦除 -修改 -写入这几个步骤,
且是以sector为单位。如果写很少的数据也需要先读出来修改后再写入。
即如下所示,写任意长度数据,可能是如下情况
Head部分
中间完整的sectors部分
最后tail部分
这三部分可能任何部分都没有,可能是任何组合。代码只需要按照这个模式,考虑3部分即可。
int w25qxx_write_data(w25qxx_dev_st* dev, uint32_t addr, uint8_t* buffer, uint32_t size){uint32_t head; /* 最开始不足sector的大小 */uint32_t addralign;uint32_t tail; /* 最后不足sector的大小 */uint32_t sectors; /* 中间完整的sector数 */int res = 0;if((dev == 0) || (buffer == 0)){return -1;}addralign = addr % dev->sectorsize;if(addralign == 0){head = 0; /* 刚好对齐 */}else{head = dev->sectorsize - addralign; /* 不对齐,head大小 */addr = addr-addralign; /* 将地址对齐到前面的sector边缘 */}sectors = (size - head)/dev->sectorsize;tail = (size - head) % dev->sectorsize;/* head部分 */if(head != 0){/* 前面不是sector对齐,addralign部分需要读出来不能改变 */res = w25qxx_read_data(dev, addr, dev->buffer, addralign);/* 擦除该sector */res = w25qxx_sector_erase(dev, addr, 1);/* 修改后面head部分 */memcpy(dev->buffer+addralign,buffer,head);buffer += head;/* 更新整个sector */res = w25qxx_sector_program(dev,addr,dev->buffer);addr += dev->sectorsize;}/* 中间整数个sector */while(sectors > 0){/* 擦除该sector */res = w25qxx_sector_erase(dev, addr, 1);/* 更新整个sector */res = w25qxx_sector_program(dev,addr,buffer);addr += dev->sectorsize;buffer += dev->sectorsize;sectors--;}/* tail部分 */if(tail > 0){/* 后面不是sector对齐,sectorsize-tail部分需要读出来不能改变 */res = w25qxx_read_data(dev, addr+tail, dev->buffer+tail, dev->sectorsize-tail);/* 擦除该sector */res = w25qxx_sector_erase(dev, addr, 1);/* 修改tail部分 */memcpy(dev->buffer,buffer,tail);/* 更新整个sector */res = w25qxx_sector_program(dev,addr,dev->buffer);}return res;}
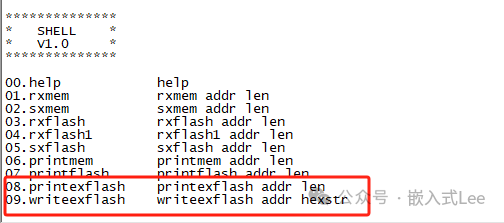
shell_func.c中添加命令
实现函数申明
static void printexflashfunc(uint8_t* param);static void writeexflashfunc(uint8_t* param);
g_shell_cmd_list_ast中添加命令行
{ (uint8_t*)"printexflash", printexflashfunc, (uint8_t*)"printexflash addr len"},{ (uint8_t*)"writeexflash", writeexflashfunc, (uint8_t*)"writeexflash addr hexstr"},
接口移植
static void io_spi_port_init(void){}static void io_spi_port_deinit(void){}static void io_spi_port_cs_write(uint8_t val){;}static void io_spi_port_sck_write(uint8_t val){}static void io_spi_port_mosi_write(uint8_t val){}static uint8_t io_spi_port_miso_read(void){}static io_spi_dev_st io_spi_dev={.cs_write = io_spi_port_cs_write,.deinit = io_spi_port_deinit,.delay_pf = 0,.delayns = 0,.init = io_spi_port_init,.miso_read = io_spi_port_miso_read,.mode = 3,.mosi_write = io_spi_port_mosi_write,.msb = 1,.sck_write = io_spi_port_sck_write,};static void w25qxx_port_enable(void){io_spi_enable(&io_spi_dev);}static void w25qxx_port_disable(void){io_spi_disable(&io_spi_dev);}static int w25qxx_port_trans(uint8_t* tx, uint8_t* rx, uint32_t size){return io_spi_trans(&io_spi_dev, tx, rx, size);}static void w25qxx_port_init(void){io_spi_init(&io_spi_dev);}static void w25qxx_port_deinit(void){io_spi_deinit(&io_spi_dev);}uint8_t flash_buffer[4096];static w25qxx_dev_st w25qxx_dev={.deinit = w25qxx_port_deinit,.disbale = w25qxx_port_disable,.enable = w25qxx_port_enable,.init = w25qxx_port_init,.trans = w25qxx_port_trans,.buffer = flash_buffer,.sectorsize = 4096,.pagesize = 256,};
实现读函数
void printexflashfunc(uint8_t* param){uint8_t buffer[16];uint32_t addr;uint32_t len;uint8_t* p = param;int res;while(1){if((*p > 'z') || (*p < 'a')){break;}else{p++;}}while(1){if(*p != ' '){break;}else{p++;}}addr = atoi((const char*)p);while(1){if((*p > '9') || (*p < '0')){break;}else{p++;}}while(1){if(*p != ' '){break;}else{p++;}}len = atoi((const char*)p);uint32_t toread;uint32_t read = 0;w25qxx_init(&w25qxx_dev);while(read < len){toread = ((len-read) > sizeof(buffer)) ? sizeof(buffer) : (len-read);if(0 != (res = w25qxx_read_data(&w25qxx_dev, addr+read, buffer, toread))){printf("read err %d\r\n",res);w25qxx_deinit(&w25qxx_dev);return;}read += toread;for(uint32_t i=0; i{printf("%02x ",buffer[i]);}printf("\r\n");}w25qxx_deinit(&w25qxx_dev);}
实现写函数
void writeexflashfunc(uint8_t* param){uint8_t buffer[16];uint32_t addr;uint32_t len=0;uint8_t* p = param;uint8_t flag;uint8_t tmp;int res;while(1){if((*p > 'z') || (*p < 'a')){break;}else{p++;}}while(1){if(*p != ' '){break;}else{p++;}}addr = atoi((const char*)p);while(1){if((*p > '9') || (*p < '0')){break;}else{p++;}}while(1){if(*p != ' '){break;}else{p++;}}flag = 0;while(*p){if(flag == 0){tmp = char2hex(*p) << 4;flag = 1;}else if(flag == 1){tmp |= char2hex(*p);flag = 0;buffer[len++] = tmp;if(len>=16){break;}}p++;}w25qxx_init(&w25qxx_dev);if(0 != (res = w25qxx_write_data(&w25qxx_dev, addr, buffer, len))){printf("write err %d\r\n",res);w25qxx_deinit(&w25qxx_dev);return;}printf("\r\n");w25qxx_deinit(&w25qxx_dev);}
可以看到命令行添加了如下命令
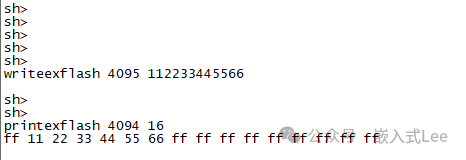
如下测试sector 4096边界处,前面sector最后1字节,后面sector开头5个字节.
回读正确,且没有破坏其他地址的数据。
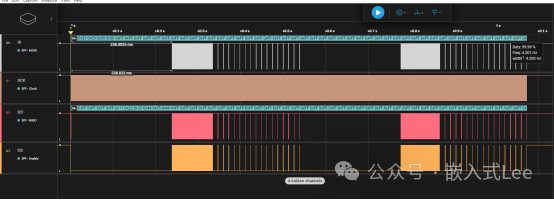
写过程如下
读过程如下
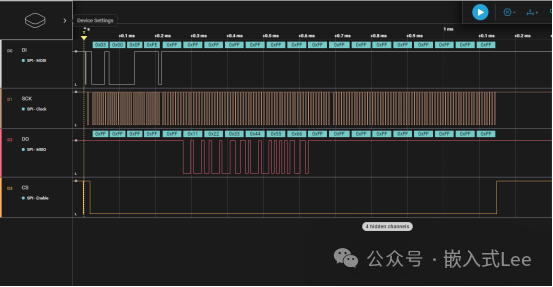
可以明显的看到了读支持随机读,简单很多。
而随机写需要读-擦除-修改-写入可以看到明显复杂很多。
以上实现了自由修改SPIFLASH的工具,我们的Demo也又添加了一项功能,朝着瑞士军刀型工具集完善。可以看出以上IO模拟SPI的代码非常简单容易移植,非常好用。包括spiflash的读写实现也可以作为库代码使用,也是按照开头的思想实现的。
很多设备的参数都是存储在spiflash里的,有了这个工具我们就可以进行自由的改写,甚至hark,clone某些设备。我们再结合之前的文章《https://mp.weixin.qq.com/s/cRgopFr1uwuxxAIxXBrj0Q超级精简系列之五:超级精简的磨损均衡掉电保护多份备份存储机制》即可实现数据存储器,还可以移植文件系统继续扩展功能。我们延续一贯的精简线路,设计积累自已的轮子,用时才能”真香”。
io_spi.h
extern "C"{typedef void (*io_spi_cs_write_pf)(uint8_t val); /**< CS写接口 */typedef void (*io_spi_sck_write_pf)(uint8_t val); /**< SCK写接口 */typedef void (*io_spi_mosi_write_pf)(uint8_t val); /**< MOSI写接口 */typedef uint8_t (*io_spi_miso_read_pf)(void); /**< MISO读接口 */typedef void (*io_spi_delay_ns_pf)(uint32_t delay); /**< 延时接口 */typedef void (*io_spi_init_pf)(void); /**< 初始化接口 */typedef void (*io_spi_deinit_pf)(void); /**< 解除初始化接口 *//*** \struct io_spi_dev_st* 接口结构体*/typedef struct{io_spi_cs_write_pf cs_write; /**< cs写接口 */io_spi_sck_write_pf sck_write; /**< sck写接口 */io_spi_mosi_write_pf mosi_write; /**< mosi写接口 */io_spi_miso_read_pf miso_read; /**< miso读接口 */io_spi_delay_ns_pf delay_pf; /**< 延时接口 */io_spi_init_pf init; /**< 初始化接口 */io_spi_deinit_pf deinit; /**< 解除初始化接口 */uint32_t delayns; /**< 延迟时间 */uint8_t mode; /**< 模式0~3 bit0 CPHA bit1 CPOL */uint8_t msb; /**< 1高位在前 否则低位在前 */} io_spi_dev_st;/*** \fn io_spi_enable* 发送CS使能信号,拉低CS* \param[in] dev \ref io_spi_dev_st*/void io_spi_enable(io_spi_dev_st* dev);/*** \fn io_spi_disable* 拉高CS,取消片选* \param[in] dev \ref io_spi_dev_st*/void io_spi_disable(io_spi_dev_st* dev);/*** \fn io_spi_trans* 传输,发送的同时读* \param[in] dev \ref io_spi_dev_st* \param[in] tx 待发送的数据 如果tx为空则默认发送FF* \param[out] rx 存储接收的数据 如果rx为空则不读* \param[in] size 传输的字节数* \retval 0 读成功* \retval -1 参数错误*/int io_spi_trans(io_spi_dev_st* dev, uint8_t* tx, uint8_t* rx, uint32_t size);/*** \fn io_spi_init* 初始化* \param[in] dev \ref io_spi_dev_st*/void io_spi_init(io_spi_dev_st* dev);/*** \fn io_spi_deinit* 解除初始化* \param[in] dev \ref io_spi_dev_st*/void io_spi_deinit(io_spi_dev_st* dev);}
io_spi.c
#include "io_spi.h"void io_spi_enable(io_spi_dev_st* dev){if((dev != 0) && (dev->cs_write != 0) && (dev->sck_write != 0)){/* 准备空闲时的SCK状态,在CS拉低之前准备好 */dev->sck_write((dev->mode & 0x02) >> 1);if(dev->delay_pf != 0){dev->delay_pf(dev->delayns);}/* 拉低CS */dev->cs_write(0);/* (5) SCK电平保持 *///if(dev->delay_pf != 0)//{// dev->delay_pf(dev->delayns);//}}}void io_spi_disable(io_spi_dev_st* dev){if((dev != 0) && (dev->cs_write != 0)){dev->cs_write(1);}}/*** _____ _____* CS |_____________________________________________________________|* _____________ _________* SCK(CPOL=0) xx__________| |___ xxx __________| |__________* __________ ____xxx __________ __________* SCK(CPOL=1) xx |_____________| |_________|* (0)* (1)* (2)* (3)(4)* (5)* (6)(7)* MISO ^ ^* MOSI ^* (1) (2) (4) (6)* (3) (5)* 其中()表示行为,^表示MOSI/MISO的输出或者采样位置.* (0) io_spi_enable 准备SCK空闲状态,拉低CS.* (1) 准备SCK初始状态,和(0)时SCK初始状态一样,代码中执行这个操作的目的仅仅是初始化局部变量cpol而已.* (2) 输出MOSI数据.* (3) 反转SCK产生第1个边沿.* (4) 如果CPHA=0 则第1个边沿采样,MISO在此采样.* (5) SCK高/低电平保持时间.* (6) 反转SCK产生第2个边沿.* (7) 如果CPHA=1 则第2个边沿采样,MISO在此采样.*/int io_spi_trans(io_spi_dev_st* dev, uint8_t* tx, uint8_t* rx, uint32_t size){uint32_t i = 0; /* 字节数循环 */uint8_t j = 0; /* 位数循环 */uint8_t msb = 0; /* MSB标志 */uint8_t cpha = 0; /* 相位标志bit0 */uint8_t cpol = 0; /* 极性标志bit1 */uint8_t rx_val = 0; /* 发送字节缓存 */uint8_t tx_val = 0; /* 接收字节缓存 */if(dev == 0){return -1;}if((dev->miso_read == 0) || (dev->mosi_write == 0) || (dev->sck_write == 0)){/* dev->delay_pf 可以不实现 */return -1;}cpha = dev->mode & 0x01;msb = dev->msb;/* (1) 准备空闲时的SCK状态 */cpol = (dev->mode & 0x02) >> 1;/* 这一句其实可以不用,和io_spi_enable效果一样,这里仅需要初始化cpol局部变量即可* 加上这一句可以在此确保SCK引脚状态初始化,可靠性角度来说加上提高冗余.*/dev->sck_write(cpol);for(i=0; i{/* 取待发送的值, 用户没有提供则发送0xFF */if(tx != 0){tx_val = *tx++;}else{tx_val = 0xFF;}/* 接收到的值初始化 */rx_val = 0;for(j=0 ;j<8; j++){/* (2)对于发送,不管对方哪个边沿采样,都是都在第一个边沿之前准备好MOSI就行* 如果对于对方第一个边沿采样,这里修改MOSI之后最好有个数据建立时间*/if(msb){dev->mosi_write(tx_val & 0x80); /* 高位在前,先发送高位,未发送数据再往高位移动 */tx_val <<= 0x1; /* 注意写的时候是先写后移位 */}else{dev->mosi_write(tx_val & 0x01); /* 低位在前,先发送低位,未发送数据再往高位移动 */tx_val >>= 0x1;}/* (3)反转产生第1个CLK边沿 */cpol ^= 0x01;dev->sck_write(cpol);if(rx != 0){if(cpha == 0){/* (4)第一个边沿采样 */if(msb){rx_val <<= 0x1; /* 注意读的时候是先移位后读 */rx_val |= dev->miso_read(); /* 高位在前,先读到低位,已接收数据再往高位移动 */}else{rx_val >>= 0x1;rx_val |= dev->miso_read() <<7; /* 低位在前,先读到高位,已接收数据再往低位移动 */}}}/* (5) SCK电平保持 */if(dev->delay_pf != 0){dev->delay_pf(dev->delayns);}/* (6)反转产生第2个CLK边沿 */cpol ^= 0x01;dev->sck_write(cpol);if(rx != 0){if(cpha == 1){/* (7) 第2个边沿采样 */if(msb){rx_val <<= 0x1;rx_val |= dev->miso_read(); /* 高位在前,先读到低位再往高位移动 */}else{rx_val >>= 0x1;rx_val |= dev->miso_read()<<7; /* 低位在前,先读到高位再往低位移动 */}}}/* (5) SCK电平保持 */if(dev->delay_pf != 0){dev->delay_pf(dev->delayns);}}/* 存储读到的值 */if(rx != 0){*rx++ = rx_val;}}return 0;}void io_spi_init(io_spi_dev_st* dev){if((dev != 0) && (dev->init != 0)){dev->init();}}void io_spi_deinit(io_spi_dev_st* dev){if((dev != 0) && (dev->deinit != 0)){dev->deinit();}}
W25Q32FV.h
extern "C"{typedef void (*w25qxx_spi_enable_pf)(void); /**< SPI接口使能 */typedef void (*w25qxx_spi_disable_pf)(void); /**< SPI接口禁能 */typedef int (*w25qxx_spi_trans_pf)(uint8_t* tx, uint8_t* rx, uint32_t size); /**< SPI读写接口 */typedef void (*w25qxx_spi_init_pf)(void); /**< 初始化接口 */typedef void (*w25qxx_spi_deinit_pf)(void); /**< 解除初始化接口 *//*** \struct w25qxx_dev_st* 接口结构体*/typedef struct{w25qxx_spi_enable_pf enable; /**< SPI接口使能 */w25qxx_spi_disable_pf disbale; /**< SPI接口禁能 */w25qxx_spi_trans_pf trans; /**< SPI读写接口 */w25qxx_spi_init_pf init; /**< 初始化接口 */w25qxx_spi_deinit_pf deinit; /**< 解除初始化接口 */uint8_t* buffer; /**< 缓存地址 */uint32_t pagesize; /**< page大小 */uint32_t sectorsize; /**< sector大小 */} w25qxx_dev_st;/*** \fn w25qxx_init* 初始化* \param[in] dev \ref w25qxx_dev_st*/void w25qxx_init(w25qxx_dev_st* dev);/*** \fn w25qxx_deinit* 解除初始化* \param[in] dev \ref w25qxx_dev_st*/void w25qxx_deinit(w25qxx_dev_st* dev);/*** \fn w25qxx_rd_sr* 读状态寄存器* \param[in] dev \ref w25qxx_dev_st* \param[in] sr 状态寄存器序号0~2* \param[out] val 存储读到的值* \return 参考w25qxx_spi_trans_pf的返回值*/int w25qxx_rd_sr(w25qxx_dev_st* dev, uint8_t sr, uint8_t* val);/*** \fn w25qxx_wr_sr* 写状态寄存器* \param[in] dev \ref w25qxx_dev_st* \param[in] sr 状态寄存器序号0~2* \param[in] val 待写入的值* \return 参考w25qxx_spi_trans_pf的返回值*/int w25qxx_wr_sr(w25qxx_dev_st* dev, uint8_t sr, uint8_t val);/*** \fn w25qxx_wr_enable* 写使能* \param[in] dev \ref w25qxx_dev_st* \return 参考w25qxx_spi_trans_pf的返回值*/int w25qxx_wr_enable(w25qxx_dev_st* dev);/*** \fn w25qxx_wr_disable* 写禁止* \param[in] dev \ref w25qxx_dev_st* \return 参考w25qxx_spi_trans_pf的返回值*/int w25qxx_wr_disable(w25qxx_dev_st* dev);/*** \fn w25qxx_sector_erase* sector擦除* \param[in] dev \ref w25qxx_dev_st* \param[in] addr 24位地址* \param[in] wait 设置为1则等待完成 设置为0不等待* \return 参考w25qxx_spi_trans_pf的返回值*/int w25qxx_sector_erase(w25qxx_dev_st* dev, uint32_t addr, uint8_t wait);/*** \fn w25qxx_page_program* page编程* \param[in] dev \ref w25qxx_dev_st* \param[in] addr 24位地址* \param[in] buffer 待写入数据* \param[in] size 待写入数据大小* \param[in] wait 设置为1则等待完成 设置为0不等待* \return 参考w25qxx_spi_trans_pf的返回值*/int w25qxx_page_program(w25qxx_dev_st* dev, uint32_t addr, uint8_t* buffer, uint32_t size, uint8_t wait);/*** \fn w25qxx_read_data* 读数据* \param[in] dev \ref w25qxx_dev_st* \param[in] addr 24位地址* \param[in] buffer 存读出的数据* \param[in] size 读出数据大小* \return 参考w25qxx_spi_trans_pf的返回值*/int w25qxx_read_data(w25qxx_dev_st* dev, uint32_t addr, uint8_t* buffer, uint32_t size);/*** \fn w25qxx_write_data* 写数据, 读出-擦除-修改-写入,支持任意大小的写入* \param[in] dev \ref w25qxx_dev_st* \param[in] addr 24位地址* \param[in] buffer 存读出的数据* \param[in] size 读出数据大小* \return 参考w25qxx_spi_trans_pf的返回值*/int w25qxx_write_data(w25qxx_dev_st* dev, uint32_t addr, uint8_t* buffer, uint32_t size);}
W25Q32FV.c
const uint8_t s_cmd_rd_sr[3]={CMD_RD_SR1,CMD_RD_SR2,CMD_RD_SR3};const uint8_t s_cmd_wr_sr[3]={CMD_WR_SR1,CMD_WR_SR2,CMD_WR_SR3};void w25qxx_init(w25qxx_dev_st* dev){dev->init();}/*** \fn w25qxx_deinit* 解除初始化* \param[in] dev \ref w25qxx_dev_st*/void w25qxx_deinit(w25qxx_dev_st* dev){dev->deinit();}/*** \fn w25qxx_rd_sr* 读状态寄存器* \param[in] dev \ref w25qxx_dev_st* \param[in] sr 状态寄存器序号0~2* \param[out] val 存储读到的值* \return 参考w25qxx_spi_trans_pf的返回值*/int w25qxx_rd_sr(w25qxx_dev_st* dev, uint8_t sr, uint8_t* val){int res;uint8_t tx[2];uint8_t rx[2];if((dev == 0) || (val == 0)){return -1;}if(sr >= sizeof(s_cmd_rd_sr)/sizeof(s_cmd_rd_sr[0])){return -1;}tx[0]=s_cmd_rd_sr[sr];tx[1]=0xFF;dev->enable();res = dev->trans(tx,rx,2);dev->disbale();*val = rx[1];return res;}/*** \fn w25qxx_wr_sr* 写状态寄存器* \param[in] dev \ref w25qxx_dev_st* \param[in] sr 状态寄存器序号0~2* \param[in] val 待写入的值* \return 参考w25qxx_spi_trans_pf的返回值*/int w25qxx_wr_sr(w25qxx_dev_st* dev, uint8_t sr, uint8_t val){int res;uint8_t tx[2];if((dev == 0) || (val == 0)){return -1;}if(sr >= sizeof(s_cmd_wr_sr)/sizeof(s_cmd_wr_sr[0])){return -1;}tx[0]=s_cmd_wr_sr[sr];tx[1]=val;dev->enable();res = dev->trans(tx,0,2);dev->disbale();return res;}int w25qxx_wr_enable(w25qxx_dev_st* dev){int res;uint8_t tx[1];if(dev == 0){return -1;}tx[0]=CMD_WR_EN;dev->enable();res = dev->trans(tx,0,1);dev->disbale();return res;}int w25qxx_wr_disable(w25qxx_dev_st* dev){int res;uint8_t tx[1];if(dev == 0){return -1;}tx[0]=CMD_WR_DIS;dev->enable();res = dev->trans(tx,0,1);dev->disbale();return res;}int w25qxx_sector_erase(w25qxx_dev_st* dev, uint32_t addr, uint8_t wait){int res;uint8_t s0 = 0xFF;uint8_t tx[4];if(dev == 0){return -1;}w25qxx_wr_enable(dev); /* 先写使能 *//* 擦除 */tx[0] = CMD_SECTOR_ERASE;tx[1] = (addr >> 16) & 0xFF; /* A23~A16*/tx[2] = (addr >> 8) & 0xFF; /* A15~A8 */tx[3] = (addr >> 0) & 0xFF; /* A7~A0 */dev->enable();res = dev->trans(tx,0,4);dev->disbale();/* 等待完成 */if (wait != 0){do{w25qxx_rd_sr(dev, 0, &s0);}while((s0 & 0x01) != 0);}return res;}int w25qxx_page_program(w25qxx_dev_st* dev, uint32_t addr, uint8_t* buffer, uint32_t size, uint8_t wait){int res;uint8_t s0 = 0xFF;uint8_t tx[4];if(dev == 0){return -1;}w25qxx_wr_enable(dev); /* 先写使能 *//* 命令和地址 */tx[0] = CMD_PAGE_PROGRAM;tx[1] = (addr >> 16) & 0xFF; /* A23~A16*/tx[2] = (addr >> 8) & 0xFF; /* A15~A8 */tx[3] = (addr >> 0) & 0xFF; /* A7~A0 */dev->enable();res = dev->trans(tx,0,4);/* 数据 */res = dev->trans(buffer,0,size);dev->disbale();/* 等待完成 */if (wait != 0){do{w25qxx_rd_sr(dev, 0, &s0);}while((s0 & 0x01) != 0);}return res;}/** 完整的sector写入*/static int w25qxx_sector_program(w25qxx_dev_st* dev, uint32_t addr, uint8_t* buffer){int res = 0;if((dev == 0) || (buffer == 0)){return -1;}if((addr % dev->sectorsize) != 0){return -1; /* 必须sector大小对齐 */}for(uint32_t i= 0; isectorsize/dev->pagesize; i++) {/* 循环一个sector的page数 */res = w25qxx_page_program(dev, addr+i*dev->pagesize, buffer+i*dev->pagesize, dev->pagesize, 1);}return res;}int w25qxx_read_data(w25qxx_dev_st* dev, uint32_t addr, uint8_t* buffer, uint32_t size){int res;uint8_t tx[4];if((dev == 0) || (buffer == 0)){return -1;}/* 命令和地址 */tx[0] = CMD_READ_DATA;tx[1] = (addr >> 16) & 0xFF; /* A23~A16*/tx[2] = (addr >> 8) & 0xFF; /* A15~A8 */tx[3] = (addr >> 0) & 0xFF; /* A7~A0 */dev->enable();res = dev->trans(tx,0,4);/* 数据 */res = dev->trans(0,buffer,size);dev->disbale();return res;}/*** 按照sector进行 读-擦除-修改-写入 更新sector* sector写入由page program循环 完成。* 需要考虑head不对齐部分* 中间完整的sectors部分* tail不对齐部分* sectorsize* | | | | |* ^-------------------------------------------------------------^* addralign|---head----|-------------------sectors--------- ----| tail|*/int w25qxx_write_data(w25qxx_dev_st* dev, uint32_t addr, uint8_t* buffer, uint32_t size){uint32_t head; /* 最开始不足sector的大小 */uint32_t addralign;uint32_t tail; /* 最后不足sector的大小 */uint32_t sectors; /* 中间完整的sector数 */int res = 0;if((dev == 0) || (buffer == 0)){return -1;}addralign = addr % dev->sectorsize;if(addralign == 0){head = 0; /* 刚好对齐 */}else{head = dev->sectorsize - addralign; /* 不对齐,head大小 */addr = addr-addralign; /* 将地址对齐到前面的sector边缘 */}sectors = (size - head)/dev->sectorsize;tail = (size - head) % dev->sectorsize;/* head部分 */if(head != 0){/* 前面不是sector对齐,addralign部分需要读出来不能改变 */res = w25qxx_read_data(dev, addr, dev->buffer, addralign);/* 擦除该sector */res = w25qxx_sector_erase(dev, addr, 1);/* 修改后面head部分 */memcpy(dev->buffer+addralign,buffer,head);buffer += head;/* 更新整个sector */res = w25qxx_sector_program(dev,addr,dev->buffer);addr += dev->sectorsize;}/* 中间整数个sector */while(sectors > 0){/* 擦除该sector */res = w25qxx_sector_erase(dev, addr, 1);/* 更新整个sector */res = w25qxx_sector_program(dev,addr,buffer);addr += dev->sectorsize;buffer += dev->sectorsize;sectors--;}/* tail部分 */if(tail > 0){/* 后面不是sector对齐,sectorsize-tail部分需要读出来不能改变 */res = w25qxx_read_data(dev, addr+tail, dev->buffer+tail, dev->sectorsize-tail);/* 擦除该sector */res = w25qxx_sector_erase(dev, addr, 1);/* 修改tail部分 */memcpy(dev->buffer,buffer,tail);/* 更新整个sector */res = w25qxx_sector_program(dev,addr,dev->buffer);}return res;}
