以上实现了IO模拟SPI接口,整个过程很自然,参考时序图操作IO即可。是骡子是马拉出来遛遛。那么我们就继续基于此来进行SPIFALSH的操作,以W25Q32FV为例,先实现状态寄存器的读写,然后再实现FLASH的读写实现FLASH编辑器的工具。
W25Q32FV手册参考《https://www.winbond.com/hq/product/code-storage-flash-memory/serial-nor-flash/?__locale=en&partNo=W25Q32FV》
我们先从手册找到对应的指令表
有3个状态寄存器分别都有对应的读写指令。
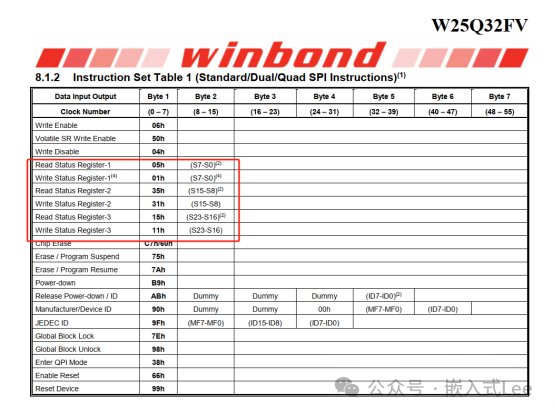
在实现时我们可以对应的数组通过索引来匹配命令
const uint8_t s_cmd_rd_sr[3]={CMD_RD_SR1,CMD_RD_SR2,CMD_RD_SR3};const uint8_t s_cmd_wr_sr[3]={CMD_WR_SR1,CMD_WR_SR2,CMD_WR_SR3};
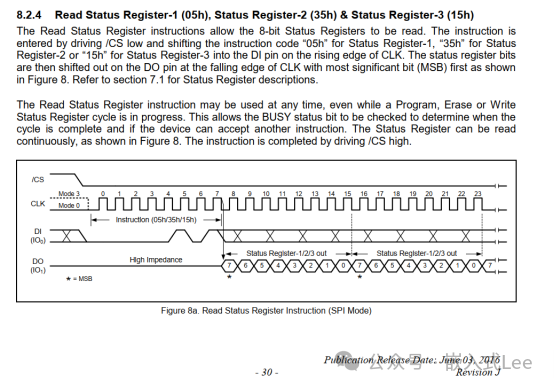
然后查看具体命令的时序图
我们看到读寄存器很简单,拉低CS发送指令字节,下一个字节就是返回的寄存器值。持续给SCK和保持CS低则重复输出寄存器值。
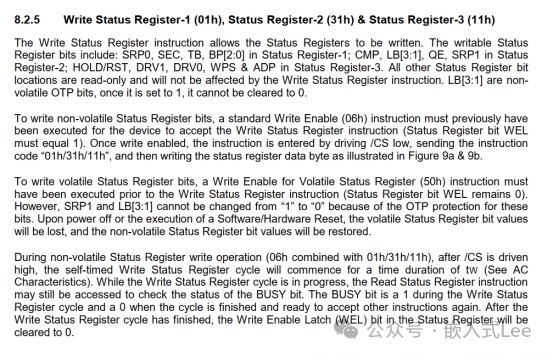
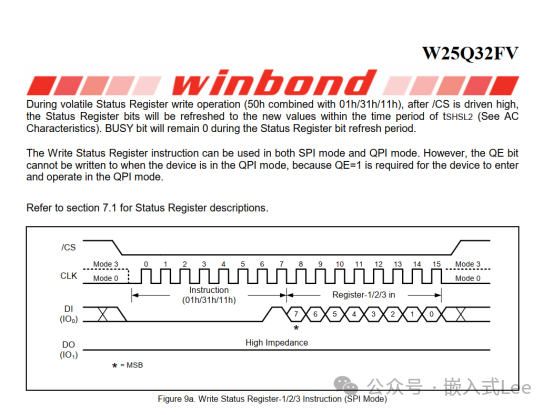
写寄存器,也很简单,拉低CS先发命令字节,然后发数据字节,拉高CS即可。
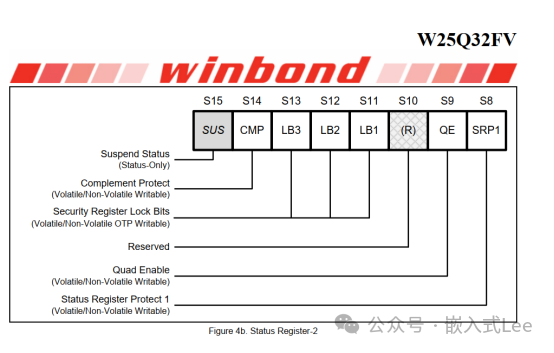
然后我们再来看状态寄存器值的含义
状态寄存器0,高6位对应保护位,WEL是写使能状态,BUSY是是否正在操作忙状态,这两位比较重要。一般操作完要检查BUSY是否为0才能继续,写之前要判断WEL是否为1可写。
该寄存器值默认值为0.

状态寄存器2
该寄存器默认值也是0,具体含义参考手册。
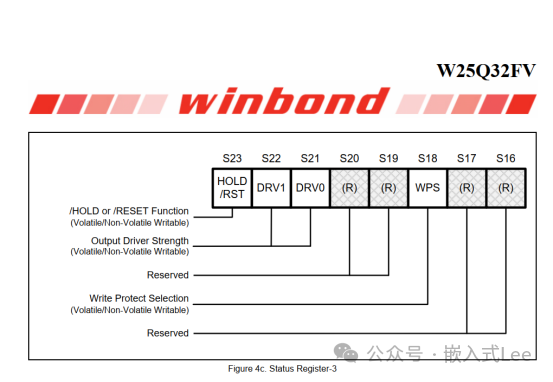
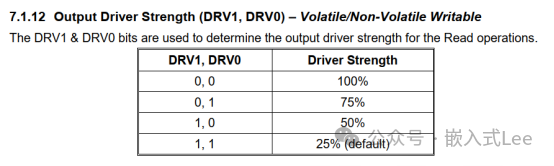
状态寄存器3,该寄存器默认值0x60.
即DRV1和DRV0都是1
以上从手册了解状态寄存器的足够多的信息,于是就可以开始写代码了。
我们还是面向对象,考虑可移植性。
W25Q32FV.h种
先抽象对SPI接口的依赖,设计设备类结构体
typedef void (*w25qxx_spi_enable_pf)(void); /**< SPI接口使能 */typedef void (*w25qxx_spi_disable_pf)(void); /**< SPI接口禁能 */typedef int (*w25qxx_spi_trans_pf)(uint8_t* tx, uint8_t* rx, uint32_t size); /**< SPI读写接口 */typedef void (*w25qxx_spi_init_pf)(void); /**< 初始化接口 */typedef void (*w25qxx_spi_deinit_pf)(void); /**< 解除初始化接口 *//*** \struct w25qxx_dev_st* 接口结构体*/typedef struct{w25qxx_spi_enable_pf enable; /**< SPI接口使能 */w25qxx_spi_disable_pf disbale; /**< SPI接口禁能 */w25qxx_spi_trans_pf trans; /**< SPI读写接口 */w25qxx_spi_init_pf init; /**< 初始化接口 */w25qxx_spi_deinit_pf deinit; /**< 解除初始化接口 */uint8_t* buffer; /**< 缓存地址 */} w25qxx_dev_st;
然后确认接口
/*** \fn w25qxx_init* 初始化* \param[in] dev \ref w25qxx_dev_st*/void w25qxx_init(w25qxx_dev_st* dev);/*** \fn w25qxx_deinit* 解除初始化* \param[in] dev \ref w25qxx_dev_st*/void w25qxx_deinit(w25qxx_dev_st* dev);/*** \fn w25qxx_rd_sr* 读状态寄存器* \param[in] dev \ref w25qxx_dev_st* \param[in] sr 状态寄存器序号0~2* \param[out] val 存储读到的值* \return 参考w25qxx_spi_trans_pf的返回值*/int w25qxx_rd_sr(w25qxx_dev_st* dev, uint8_t sr, uint8_t* val);/*** \fn w25qxx_wr_sr* 写状态寄存器* \param[in] dev \ref w25qxx_dev_st* \param[in] sr 状态寄存器序号0~2* \param[in] val 待写入的值* \return 参考w25qxx_spi_trans_pf的返回值*/int w25qxx_wr_sr(w25qxx_dev_st* dev, uint8_t sr, uint8_t val);/*** \fn w25qxx_wr_enable* 写使能* \param[in] dev \ref w25qxx_dev_st* \return 参考w25qxx_spi_trans_pf的返回值*/int w25qxx_wr_enable(w25qxx_dev_st* dev);/*** \fn w25qxx_wr_disable* 写禁止* \param[in] dev \ref w25qxx_dev_st* \return 参考w25qxx_spi_trans_pf的返回值*/int w25qxx_wr_disable(w25qxx_dev_st* dev);
最后就是实现接口,W25Q32FV.c中
命令定义和初始化解除初始化实现
const uint8_t s_cmd_rd_sr[3]={CMD_RD_SR1,CMD_RD_SR2,CMD_RD_SR3};const uint8_t s_cmd_wr_sr[3]={CMD_WR_SR1,CMD_WR_SR2,CMD_WR_SR3};void w25qxx_init(w25qxx_dev_st* dev){dev->init();}/*** \fn w25qxx_deinit* 解除初始化* \param[in] dev \ref w25qxx_dev_st*/void w25qxx_deinit(w25qxx_dev_st* dev){dev->deinit();}
读状态寄存器
/*** \fn w25qxx_rd_sr* 读状态寄存器* \param[in] dev \ref w25qxx_dev_st* \param[in] sr 状态寄存器序号0~2* \param[out] val 存储读到的值* \return 参考w25qxx_spi_trans_pf的返回值*/int w25qxx_rd_sr(w25qxx_dev_st* dev, uint8_t sr, uint8_t* val){int res;uint8_t tx[2];uint8_t rx[2];if((dev == 0) || (val == 0)){return -1;}if(sr >= sizeof(s_cmd_rd_sr)/sizeof(s_cmd_rd_sr[0])){return -1;}tx[0]=s_cmd_rd_sr[sr];tx[1]=0xFF;dev->enable();res = dev->trans(tx,rx,2);dev->disbale();*val = rx[1];return res;}
写状态寄存器
/*** \fn w25qxx_wr_sr* 写状态寄存器* \param[in] dev \ref w25qxx_dev_st* \param[in] sr 状态寄存器序号0~2* \param[in] val 待写入的值* \return 参考w25qxx_spi_trans_pf的返回值*/int w25qxx_wr_sr(w25qxx_dev_st* dev, uint8_t sr, uint8_t val){int res;uint8_t tx[2];if((dev == 0) || (val == 0)){return -1;}if(sr >= sizeof(s_cmd_wr_sr)/sizeof(s_cmd_wr_sr[0])){return -1;}tx[0]=s_cmd_wr_sr[sr];tx[1]=val;dev->enable();res = dev->trans(tx,0,2);dev->disbale();return res;}
写使能和禁止
int w25qxx_wr_enable(w25qxx_dev_st* dev){int res;uint8_t tx[1];if(dev == 0){return -1;}tx[0]=CMD_WR_EN;dev->enable();res = dev->trans(tx,0,1);dev->disbale();return res;}int w25qxx_wr_disable(w25qxx_dev_st* dev){int res;uint8_t tx[1];if(dev == 0){return -1;}tx[0]=CMD_WR_DIS;dev->enable();res = dev->trans(tx,0,1);dev->disbale();return res;}
可以看到实现非常简单,具备高可移植性。
我们还是基于之前的命令行实现,来添加命令进行测试
shell_func.c中
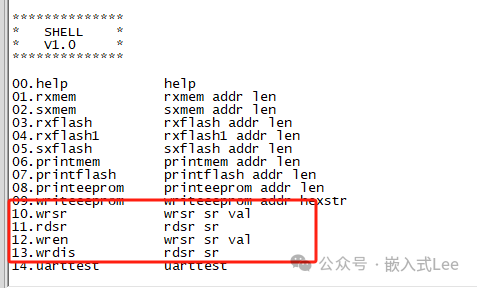
申明实现函数,g_shell_cmd_list_ast中添加命令
static void wrsrfunc(uint8_t* param);static void rdsrfunc(uint8_t* param);static void wrenfunc(uint8_t* param);static void wrdisfunc(uint8_t* param);{ (uint8_t*)"wrsr", wrsrfunc, (uint8_t*)"wrsr sr val"},{ (uint8_t*)"rdsr", rdsrfunc, (uint8_t*)"rdsr sr"},{ (uint8_t*)"wren", wrenfunc, (uint8_t*)"wren"},{ (uint8_t*)"wrdis", wrdisfunc, (uint8_t*)"wrdis"},
实现IO操作接口和设备实例
static void io_spi_port_init(void){}static void io_spi_port_deinit(void){}static void io_spi_port_cs_write(uint8_t val)}static void io_spi_port_sck_write(uint8_t val){}static void io_spi_port_mosi_write(uint8_t val){}static uint8_t io_spi_port_miso_read(void){}static void io_spi_port_delay(uint32_t delay){}static io_spi_dev_st io_spi_dev={.cs_write = io_spi_port_cs_write,.deinit = io_spi_port_deinit,.delay_pf = io_spi_port_delay,.delayns = 100,.init = io_spi_port_init,.miso_read = io_spi_port_miso_read,.mode = 3,.mosi_write = io_spi_port_mosi_write,.msb = 1,.sck_write = io_spi_port_sck_write,};
实现flash依赖的接口和设备实例
static void w25qxx_port_enable(void){io_spi_enable(&io_spi_dev);}static void w25qxx_port_disable(void){io_spi_disable(&io_spi_dev);}static int w25qxx_port_trans(uint8_t* tx, uint8_t* rx, uint32_t size){return io_spi_trans(&io_spi_dev, tx, rx, size);}static void w25qxx_port_init(void){io_spi_init(&io_spi_dev);}static void w25qxx_port_deinit(void){io_spi_deinit(&io_spi_dev);}static w25qxx_dev_st w25qxx_dev={.deinit = w25qxx_port_deinit,.disbale = w25qxx_port_disable,.enable = w25qxx_port_enable,.init = w25qxx_port_init,.trans = w25qxx_port_trans,};
实现写命令
void wrsrfunc(uint8_t* param){uint32_t sr;uint32_t val;uint8_t* p = param;while(1){if((*p > 'z') || (*p < 'a')){break;}else{p++;}}while(1){if(*p != ' '){break;}else{p++;}}sr = atoi((const char*)p);while(1){if((*p > '9') || (*p < '0')){break;}else{p++;}}while(1){if(*p != ' '){break;}else{p++;}}val = atoi((const char*)p);w25qxx_init(&w25qxx_dev);w25qxx_wr_sr(&w25qxx_dev, sr, val);w25qxx_deinit(&w25qxx_dev);}
实现读命令
void rdsrfunc(uint8_t* param){uint32_t sr;uint8_t val=0;uint8_t* p = param;while(1){if((*p > 'z') || (*p < 'a')){break;}else{p++;}}while(1){if(*p != ' '){break;}else{p++;}}sr = atoi((const char*)p);w25qxx_init(&w25qxx_dev);w25qxx_rd_sr(&w25qxx_dev, sr, &val);w25qxx_deinit(&w25qxx_dev);printf("val = %d\r\n",val);}
实现使能禁止命令
void wrenfunc(uint8_t* param){(void)param;w25qxx_init(&w25qxx_dev);w25qxx_wr_enable(&w25qxx_dev);w25qxx_deinit(&w25qxx_dev);}void wrdisfunc(uint8_t* param){(void)param;w25qxx_init(&w25qxx_dev);w25qxx_wr_disable(&w25qxx_dev);w25qxx_deinit(&w25qxx_dev);}
进入命令行help查看添加的命令
先写使能读出寄存器0值为1即bit1=1 WEL=1
然后写禁止读出寄存器0变为0.
sh>
wren
rdsr 0
val = 2
wrdis
rdsr 0
val = 0
波形如下


注意如果这里要将寄存器0改为0必须要
Wren使能,然后wrsr 0 2写2而不是写0。
sh>
rdsr 0
val = 252
wrsr 0 2
rdsr 0
val = 252
wren
rdsr 0
val = 254 此时已经写使能但是wrsr 0 0不能写0
wrsr 0 0
rdsr 0
val = 254
wrsr 0 2 wrsr 0 2写2才能写0
rdsr
val = 0
先要写使能
wren
然后写
wrsr 0 252
最后读
rdsr 0
sh>
wren
wrsr 0 252
rdsr 0
val = 252
可以看到回读值正确。
波形如下


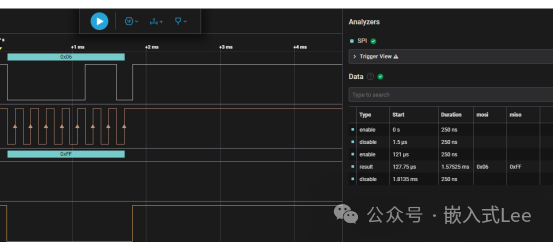
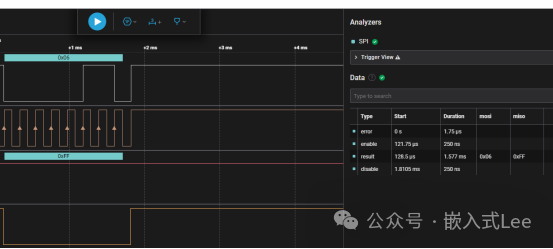
命令rdsr 0
sh>
rdsr 0
val = 0
逻辑分析仪抓到信号如下

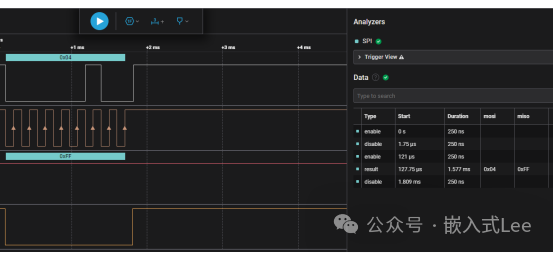
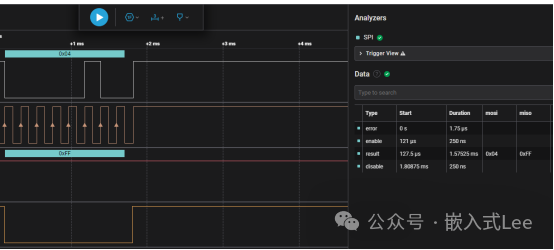
命令rdsr 1
sh>
rdsr 1
val = 0
逻辑分析仪抓到信号如下
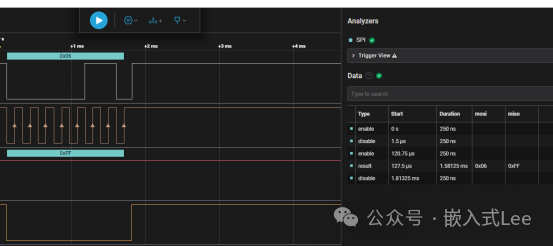
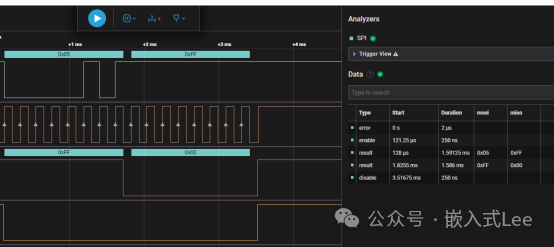
命令rdsr 2
sh>
rdsr 2
val = 96
逻辑分析仪抓到信号如下

io_spi_dev的.mode改为0
先写使能读出寄存器0值为1即bit1=1 WEL=1
然后写禁止读出寄存器0变为0.
sh>
wren
rdsr 0
val = 2
wrdis
rdsr 0
val = 0
波形如下

先要写使能
wren
然后写
wrsr 0 252
最后读
rdsr 0
sh>
wren
wrsr 0 252
rdsr 0
val = 252
可以看到回读值正确。
波形如下
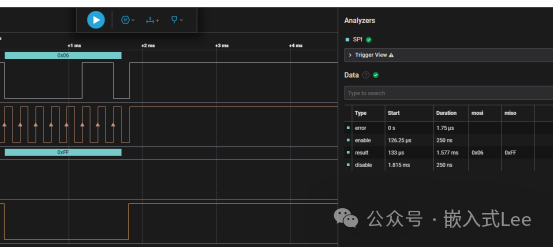


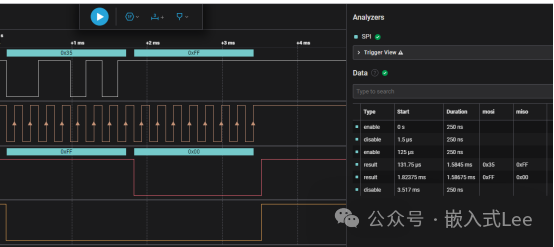
命令rdsr 0
sh>
rdsr 0
val = 0
逻辑分析仪抓到信号如下
可见空闲时SCK是低,最后CS拉高后SCK为高是因为deinit了,io引脚被默认拉高了,cs之前空闲是低的。

命令rdsr 1
sh>
rdsr 1
val = 0
逻辑分析仪抓到信号如下

命令rdsr 2
sh>
rdsr 2
val = 96
逻辑分析仪抓到信号如下

