示波器是最重要也是最基础的工具。基本上电子专业都会问到这个问题。尤其做硬件测试的时候,示波器更是需要如同使用筷子一样的熟练度。
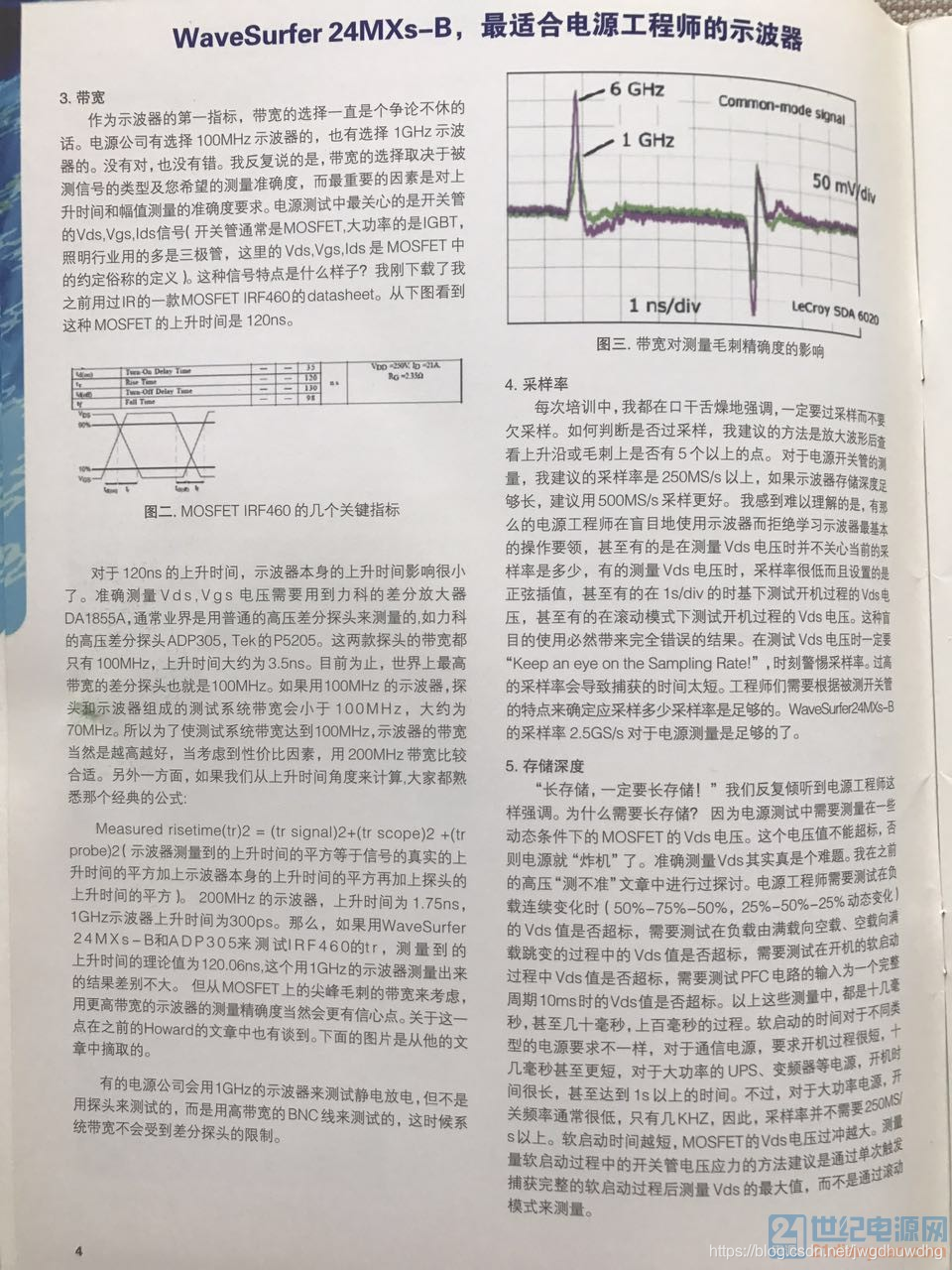
一、示波器的带宽:输入信号衰减 3dB 所在的最低频率称为示波器的带宽。(带宽定义:示波器带宽的定义没有变,就是输入一个正弦波,保持幅度不变,增加信号频率,当示波器上显示的信号是实际信号幅度的70.7%(即3dB衰减)的时候,该对应的频率就等于示波器带宽。)使用正弦波信号发生器,在扫描频率上测试示波器的带宽和频率响应。信号 -3 dB 频率处衰减约为 -30% 幅度误差。所以当信号的主要频率接近示波器的带宽时,很难对信号进行非常精确的测量。所以当信号的主要频率接近示波器的带宽时,很难对信号进行非常精确的测量。
对于数字应用,您应当选择带宽比设计中的最快时钟速率至少高 5 倍的示波器。但是,如果您需要对信号进行精确的边沿速度测量,则必须先确定信号中的最大实际频率。
对于模拟应用,应当选择带宽比设计中的最高模拟频率至少高 3 倍的示波器。但这个建议仅适用于在较低频段中具有相对平坦的频率响应的示波器。
五倍准测!!!兄弟们
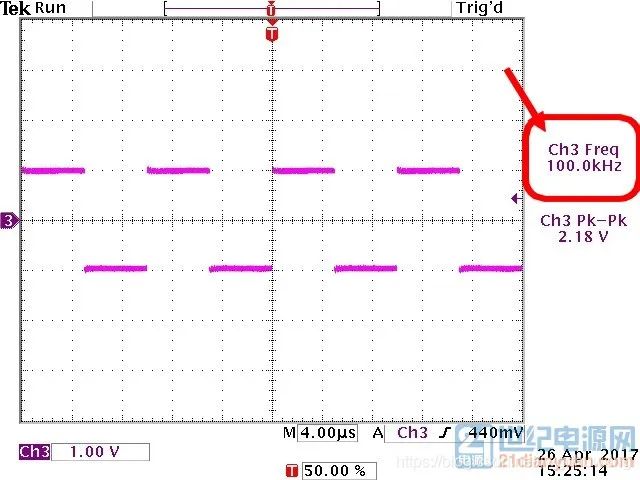
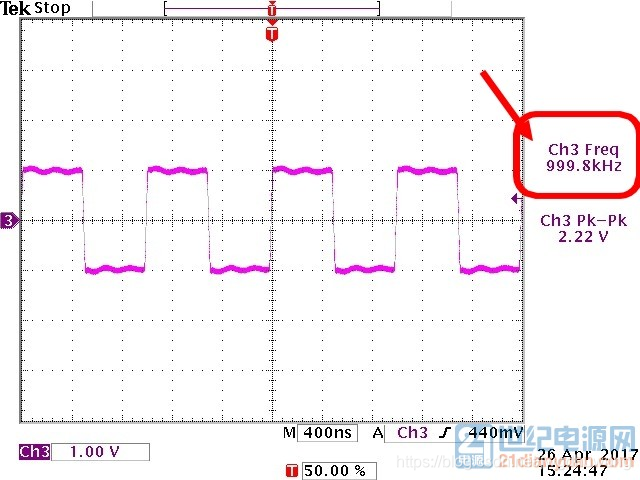
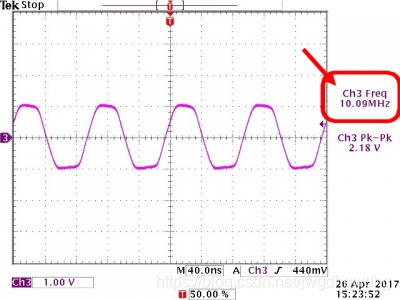
再看看以下几个波形,分别为100KHz、1MHz 和 10MHz 的方波,示波器为Tektronix的TDS-3014B,100MHz带宽。
这里区别信号的带宽,信号的带宽的意思是信号的最高频率分量与最低频率分量之差,譬如,一个由数个正弦波叠加成的方波信号,其最低频率分量是其基频,假定为f =2kHz,其最高频率分量是其7次谐波频率,即7f =7×2=14kHz,因此该信号带宽为7f - f =14-2=12kHz。
http://bbs.21dianyuan.com/forum.php?mod=viewthread&tid=288238附着一篇大佬争辩,100MHZ的示波器能否测100MHZ的信号。
一个示波器的带宽是40Mhz,40MHZ是指示波器能测量标准正弦波的能力,关于带宽的争论很多,掌握好5倍原则就可以了。
二、示波器的采样率
每秒采样多少个样点。 根据香农定理,为了避免波形混叠,采样率应该大于波形频率的2倍。单位为 Sa/s。sa的意思sample即采样点。如果示波器的采样率为1GSa/S,也就是每秒可以采样1G个点
三、存储深度:表示示波器可以保存的采样点的个数。
存储深度=采样率x采样时间就是说以50MS/s的采样率捕获200ms的波形,需要示波器的存储深度是10MS。
假如存储深度是“1千万个采样点”,示波器厂商写作10Mpts,10MS或10M的都有。这里,pts可以理解为points的缩写,S理解为Samples的意思。
以上都是关于示波器选型的基本参数,下面讲一个挺重要的,基本上测试都会面的问题。。就是示波器的触发功能,可能篇幅还比较长。根据美国力科驻深圳代表汪进进的一篇文章来整理归纳。
触发是数字示波器区别于模拟示波器的最大特征之一。
示波器可以通过设置一个 “触发事件”(可以是某个电平或跳变等) 来实现同步:当示波器检测到信号流中,出现了目标事件时,以此为起点,进行波形扫描与显示。信号“触发”扫描,这项功能,也就是示波器 “触发模式”。
所谓触发,按专业上的解释是:按照需求设置一定的触发条件,当波形流中的某一个波形满足这一条件时,示波器即实时捕获该波形和其相邻部分,并显示在屏幕上。触发条件的唯一性是精确捕获的首要条件。为了观察特定波形之前发生的更多事件,把触发点往显示窗口右方推移一段时间,即是延迟触发;为了了解特定波形之后发生的更多事件,把触发点往显示窗口左方推移一段时间,即是超前触发。
所谓触发,我理解的作用有两点:
第一,隔离感兴趣的事件。第二,同步波形,或者说稳定显示波形。为说明清楚这两个作用,我们先来回顾一下设置触发时要关注的一些方面:触发源,触发点,触发电平,触发模式,触发方式。
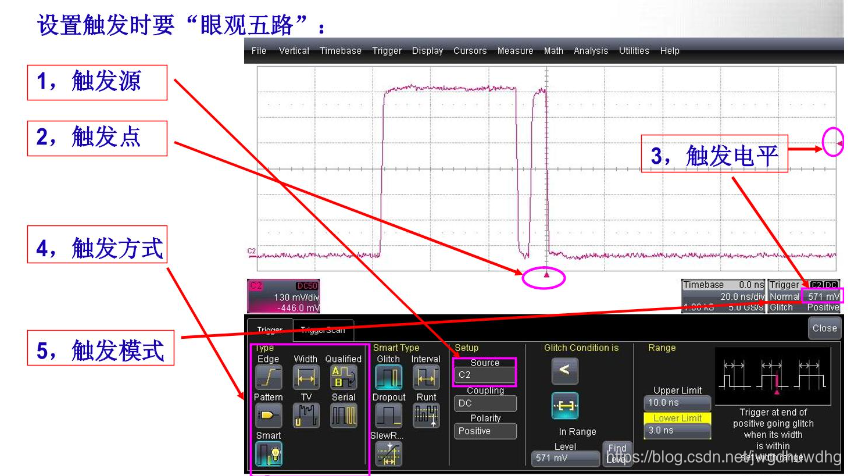
触发源:就是以哪个通道的信号作为触发对象。触发源可以是示波器的任意通道也可以是外部通道。
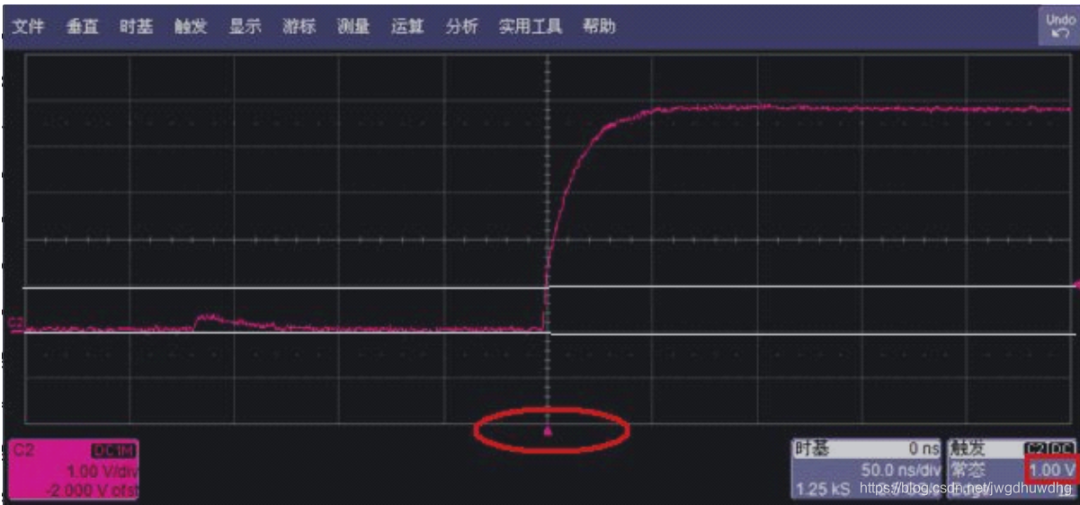
触发点::触发点有时侯也叫触发延迟,但我觉得就叫触发点更直观些。它的含义刚已有所解释,就是眼睛注视的点,就是示波器让波形停留的时刻,也就是示波器上红色的小三角对应的位置。触发电平为1V。如下图所示
设置好触发条件后,触发点的位置对应的波形应都是满足触发条件的。或者说示波器让满足触发条件的波形隔离在这个触发点的位置。
触发电平:触发电平是指信号需要达到该电平才能被触发。设置任何触发条件都需要有一个具体的触发电平。触发电平可以在 Trigger 菜单中
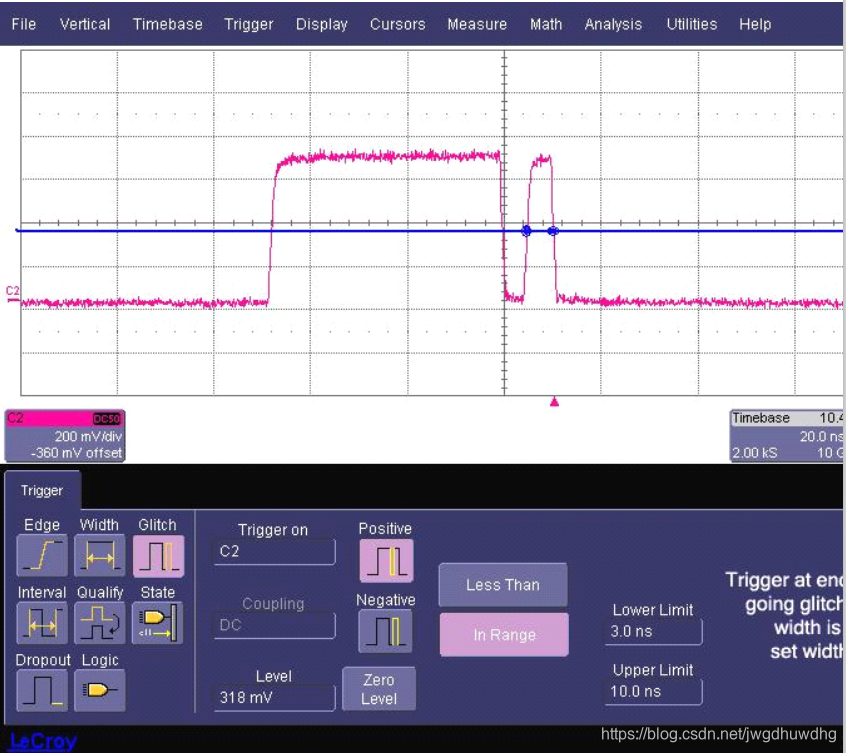
设置,也可以通过面板上的旋钮来调节。很多触发方式的条件都是相对于触发电平而言。譬如宽度触发,触发电路识别的宽度(时间间隔)并不是上升沿的 50%到下一个上升沿的 50%,而是触发电平穿越两个上升沿的交叉点之间的时间间隔。如下图所示,并不是最高的点间隔,也不是中间点的间隔,而是触发电平与波形交叉点的间隔。图中识别3ns~10ns的脉冲宽度。这也就是说触发功能隔离了我们感兴趣的 3ns-10ns 之间的脉冲宽度。
触发模式一: Auto Setup即自动触发设置,示波器根据被测信号的特点自动设置示波器的水平时基,垂直灵敏,偏置和触发条件,使得波形能显示在示波器上。在这种模式下,当触发没有发生时,示波器的扫描系统会根据设定的扫描速率自动进行扫描;而当有触发发生时,扫描系统会尽量按信号的频率进行扫描,所以在这种模式下不论触发条件是否满足,示波器都会产生扫描,都可以在屏幕上可以看到有变化的扫描线,这是这种模式的特点。不管是否满足触发条件,都实时刷新波形,这时候示波器的屏幕上的波形通常看起来是“晃动”的。
触发模式二:是“正常模式/常规模式(NORM)”,这种模式与自动模式不同,在这种模式下示波器只有当触发条件满足了才进行扫描,如果没有触发,就不进行扫描。波形静止不动,因此在这种模式下如果没有触发的话,对于模拟示波器会看不到扫描线,屏幕上什么都没有,对于数字示波器会看不到波形更新,不了解这一点常常会以为是信号没连上或什么其他故障。
触发模式三:单次模式(SINGLE)这种模式与“正常模式”有点类似,就是只有当触发条件满足时才产生扫描,否则不扫描。而不同之处在于,这种扫描一但产生并完成后,示波器的扫描系统即进入一种休止状态,即使后面再有满足触发条件的信号出现也不再进行扫描,也就是触发一次只扫描一次,即单次,必须通过手工的方法将扫描系统重启,才能产生下一次触发。指仅捕获第一次满足触发条件的波形,捕获后就停止。
**触发功能:**一、是在触发点处隔离的事件是满足触发条件的信号。
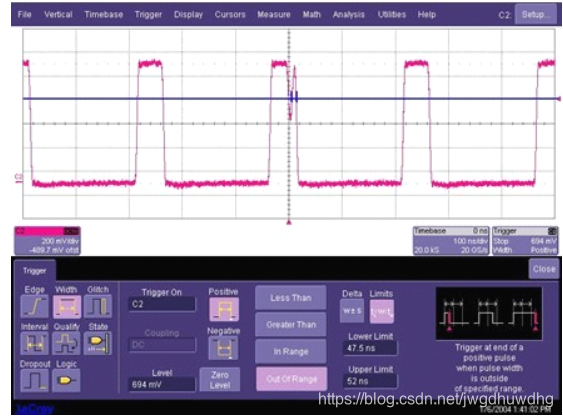
如上图所示,在触发点隔离的事件是总小于 47.5ns 或大于 52ns 的脉宽,该脉宽的计算是以触
发电平穿越触发点处的脉宽波形的交叉点处的时间间隔。
二、同步波形,或者说稳定显示波形。就是找到一种触发方式使波形不再“晃动”,也就是找出信号的规律性来同步信号。如下图所示
每组数据包里有四个脉冲,这四个脉冲并不是等时间间隔的,如果用上升沿触发,则波形不能同步,视觉上在“晃动”,但是每组数据包是等时间间隔到来的,如果以每组数据包的第一个脉冲的上升沿作为触发源,则能稳定显示波形。因此可以用边沿延迟触发,在前一个上升沿到来之后,延迟一段时间再触发下一个上升沿,在上例中需要延迟的时间为标识的蓝色的时间间隔部分。
下面也就是最难,内容最多的触发方式
边沿触发(Edge):是最常用最简单最有效的触发方式,绝大多数的应用都只是用边沿触发来触发波形。边沿触发仅是甄测信号的边沿、极性和电平。*当被测信号的电平变化方向与设定相同(上升沿或下降沿),其值变化到与触发电平相同时,示波器被触发,并捕捉波形。
边沿延迟触发(holdoff):每次触发到前一个边沿之后,等待设定的延迟时间或延迟事件再触发下一个满足条件的边沿,最长可延迟 20s 或 9,999,999 个事件。事件是相对于触发电平而言。
如下图所示
宽度和毛刺触发:根据信号宽度值/毛刺值触发,可选正向或负向宽度/毛刺,可用于捕捉信号中的罕见宽度/毛刺信号。
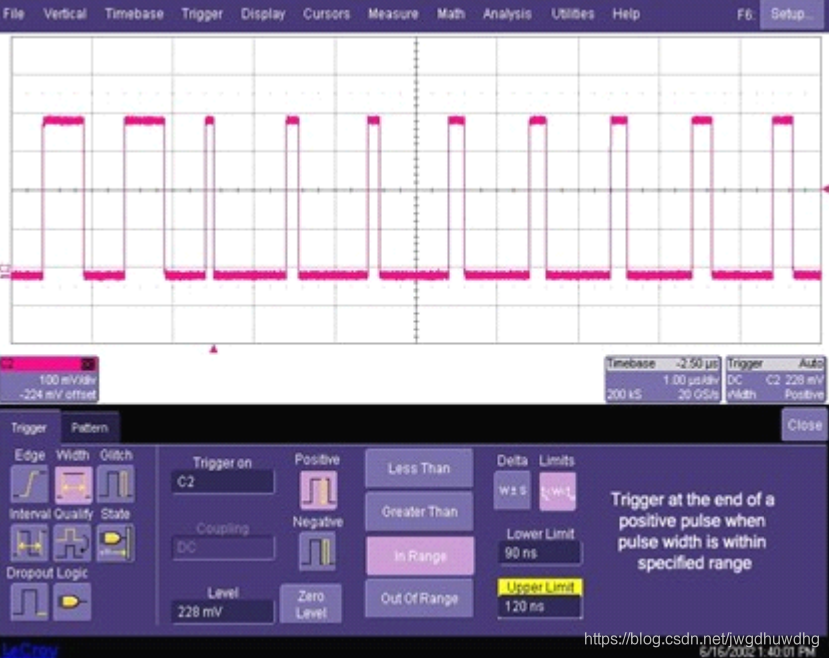
下图示波器设置的触发事件是:当 C2 的脉冲在触发电平处的正脉宽在 90ns 和 120ns 之间时被隔离,触发点停留的位置是脉冲的下降沿。如果触发的是负脉宽,则触发点停留的位置是脉冲的上升沿。脉宽的范围定义可以是小于,大于,在范围内或范围外。毛刺触发和宽度触发类似。
间隔触发: 根据相邻的同极性的沿的时间来触发,正到正或负到负。设定的条件也可以小于、大于、在范围内或范围外。
下图示波器设置的触发事件是:当穿越触发电平的相邻正沿之间的时间间隔在 1.5us 到 2.5us 之间时被触发。图中一定要将触发电平设置为超过欠幅的矮脉冲,否则条件永远不会满足。

条件触发: 条件触发是两个通道之间的关联触发。当第二个波形设定条件满足一次后,在第一个波形边沿处触发。
下图含义是,当C3的电平超过500mv时,C2 的上升沿达到触发电平
200mV 时,触发 C2 的上升沿。(C3是条件)

状态触发: 状态触发和条件触发类似。当第二个波形设定条件满足并保持该状态后,在第一个波形边沿处触发 。它要求第二个波形达到某个条件之后保持该状态。
下图设置含义是:在 C3 的上升沿达到触发电平 500mV 时,触发 C2 的上升沿但前提是在这之前 C2 的电平超过了 500mV 并一直保持超过 500mV 的状态,而且要等到 C2 的上升沿有 3 次达到触发电平之后才触发。

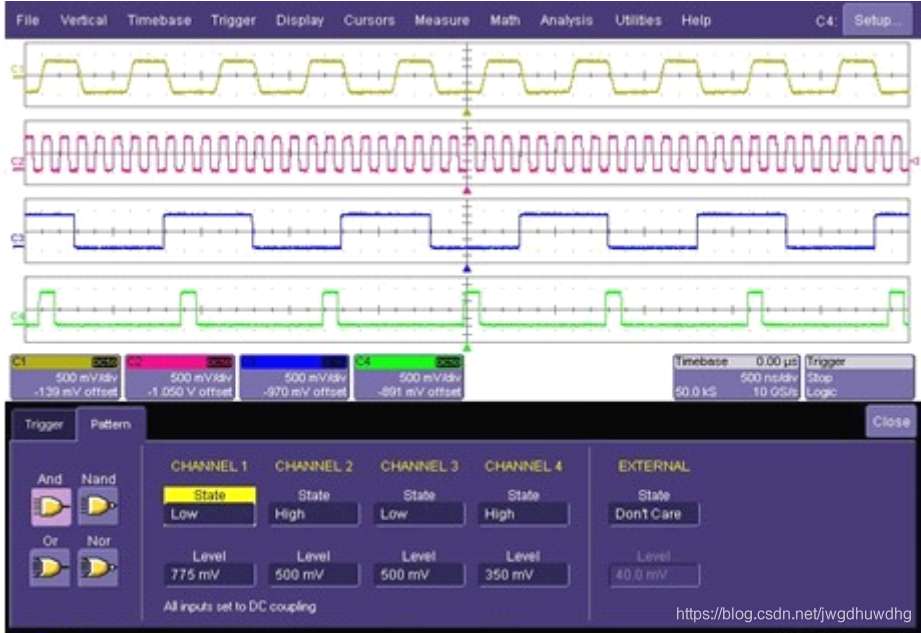
**逻辑触发:**各通道信号分别同时满足所设定逻辑电平条件及所选择的逻辑关系后触发。可选逻辑条件:与 (And),非与 (Nand),或 (Or),非或 (Nor)。
下图触发含义:C1的电平低于 775mV,C2 的电平高于 500mV,C3 的电平低于 500mV,C4 的电平高于 350mV,它们同时满足这个条件时触发
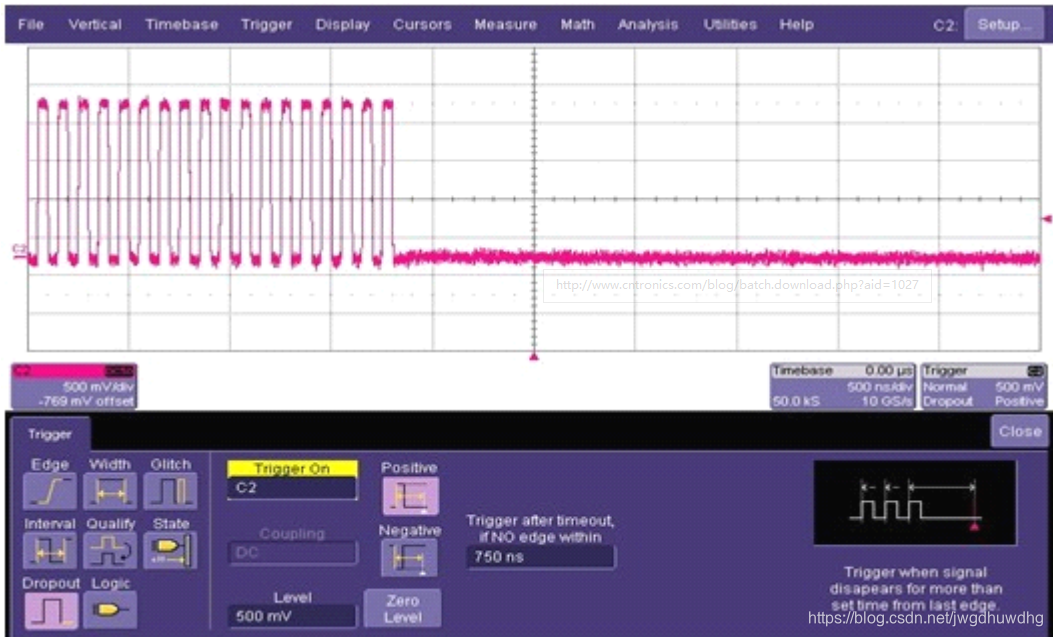
漏失触发:当信号最后的边沿消失了设定的时间后触发。
下图触发设置含义::在 C2的最后一个上升沿消失之后等待 750ns 被触发。
欠幅触发: 当脉冲序列的宽度不确定,大多数脉冲信号的幅值相同,但有小概率的欠幅信号
时所需要采取的一种触发方式。当脉冲穿越了第一个门限电平,但在一定的时间
范围内不能穿越另外一个门限电平时被触发。
如图所示:

TV 触发: 专门为电视信号而设计的一种触发方式,在该模式下触发电平控制不起作用。示波器使用视频信号中同步脉冲作为触发信号。TV 触发有两种模式,TVF 场和TVL 行

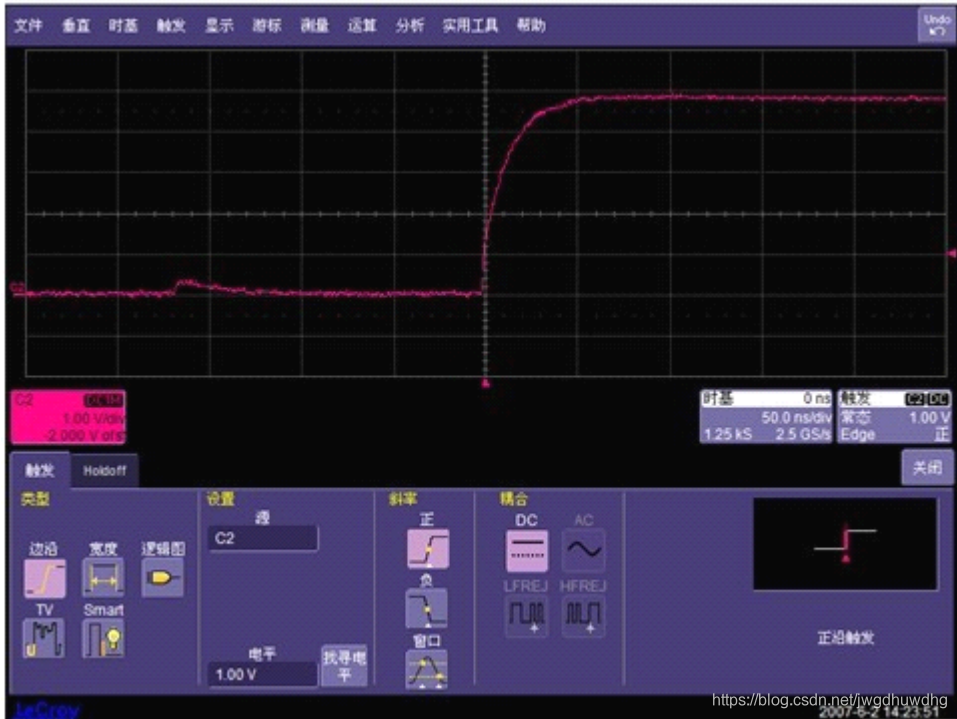
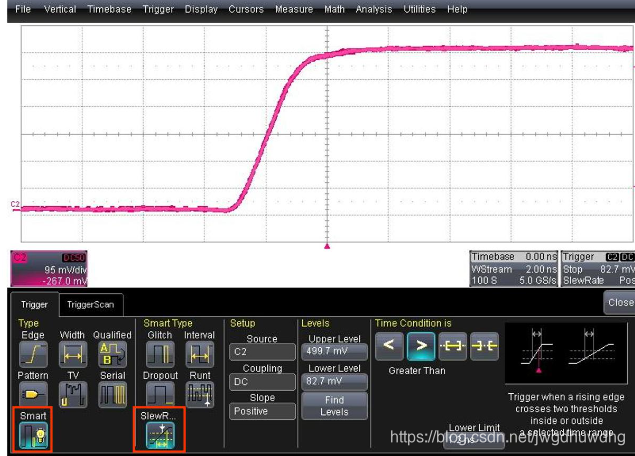
斜率触发:当信号的斜率满足一定的条件时被触发。
如图所示
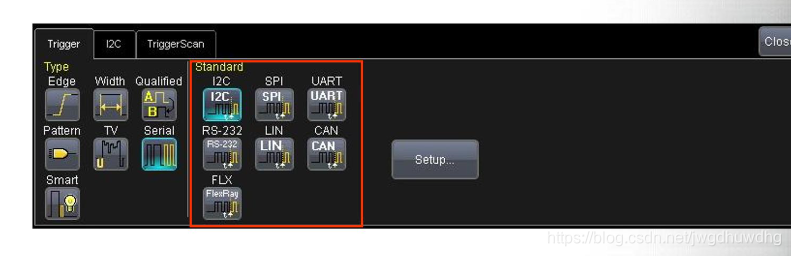
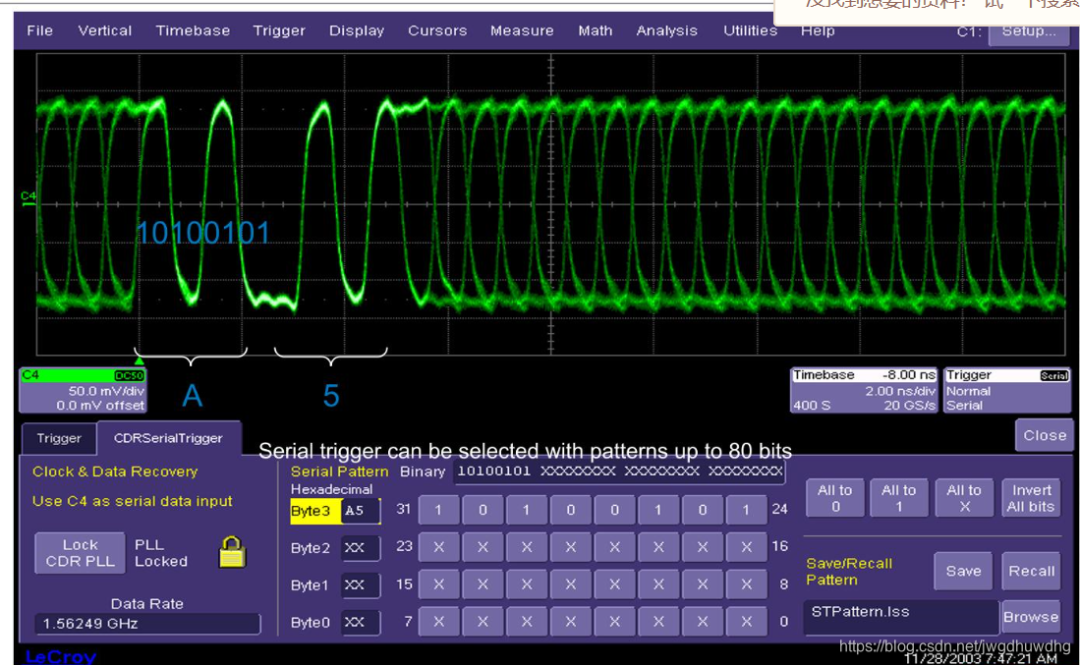
协议触发:根据特定的通信协议码型而设定的解码方式比如232,iic,can,lin等等
高速串行总线触发:
声明:文章来源网络。本号对所有原创、转载文章的陈述与观点均保持中立,推送文章仅供读者学习和交流。文章、图片等版权归原作者享有,如有侵权,联系删除。投稿/招聘/推广/宣传 请加微信:woniu26a
推荐阅读▼
后台回复“加群”,管理员拉你加入同行技术交流群。
 点击上方名片关注了解更多
点击上方名片关注了解更多