


Zorb Framework是一个基于面向对象的思想来搭建一个轻量级的嵌入式框架。
搭建Zorb Framework的目的是为在不能运行Linux的芯片上快速开发应用,不用反复造轮子。
Zorb Framework的初步设计功能有:
1、时间系统功能zf_time
2、环形缓冲区功能zf_buffer
3、列表功能zf_list
4、状态机功能zf_fsm
5、事件功能zf_event
6、定时器功能zf_timer
前6个功能,就可以实现纯事件驱动的程序,基本可以满足中小型嵌入式应用程序开发的需求。加上任务功能,是为了满足部分程序对实时性要求较高的需求。
当然,也可以将前6个功能裁剪出来,然后运行在现有的嵌入式系统上面,这样子也可以满足实时性的需求。
采用STM32F429开发板作为硬件运行环境,硬件资源用到串口1和systick,其中串口1提供调试打印功能,systick提供系统时间计数功能。
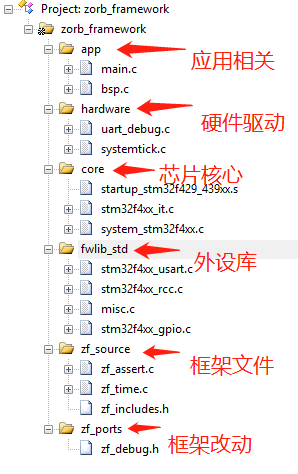
关于硬件环境的搭建不多说,可以参照开发板提供的例程来搭建,板级初始化完成了调试串口和systick的初始化。
/******************************************************************************
* 描述 :硬件环境初始化
* 参数 :无
* 返回 :无
******************************************************************************/
void BSP_init(void)
{
/* 嵌套向量中断控制器组选择 */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
/* 初始化调试串口 */
Debug_USART_init();
/* Systick初始化 */
SystemTick_init();
}
/******************************************************************************
* 描述 :硬件底层程序
* 参数 :无
* 返回 :无
******************************************************************************/
void BSP_process(void)
{
}
开发一个程序,最开始也最重要的是搭建调试的环境,我们采用串口1作为调试输出(printf映射),然后调试信息分为三个等级,后续上位机可以根据不同等级进行高亮提示:
/**
*****************************************************************************
* @file zf_debug.h
* @author Zorb
* @version V1.0.0
* @date 2018-06-28
* @brief 调试输出的头文件
*****************************************************************************
* @history
*
* 1. Date:2018-06-28
* Author:Zorb
* Modification:建立文件
*
*****************************************************************************
*/
#ifndef __ZF_DEBUG_H__
#define __ZF_DEBUG_H__
#ifdef __cplusplus
extern "C" {
#endif
#include "stdio.h"
#include "stdbool.h"
#define LOG_D 0; /* 信息等级:正常 */
#define LOG_W 1; /* 信息等级:告警 */
#define LOG_E 2; /* 信息等级:错误 */
#define _ZF_DEBUG /* 定义调试功能 */
#define ZF_DEBUG_ON true /* 启用调试功能 */
#ifdef _ZF_DEBUG
#if ZF_DEBUG_ON
#define ZF_DEBUG(rank, x...) do \
{ \
char code[10] = "[rank=0]"; \
code[6] = '0' + (char)rank; \
if (code[6] != '0') \
{ \
printf("%s", code); \
} \
printf(x); \
} while(0)
#else
#define ZF_DEBUG(rank, x...)
#endif /* ZF_DEBUG_ON */
#endif /* _ZF_DEBUG */
#ifdef __cplusplus
}
#endif
#endif /* __ZF_DEBUG_H__ */
/******************************** END OF FILE ********************************/
在开发过程中,在关键地方进行一些断言,可以方便定位bug。
/**
*****************************************************************************
* @file zf_assert.h
* @author Zorb
* @version V1.0.0
* @date 2018-06-28
* @brief 断言的头文件
*****************************************************************************
* @history
*
* 1. Date:2018-06-28
* Author:Zorb
* Modification:建立文件
*
*****************************************************************************
*/
#ifndef __ZF_ASSERT_H__
#define __ZF_ASSERT_H__
#ifdef __cplusplus
extern "C" {
#endif
#include "stdint.h"
#define _ZF_ASSERT /* 定义断言功能 */
#define ZF_ASSERT_ON true /* 启用断言功能 */
#ifdef _ZF_ASSERT
#if ZF_ASSERT_ON
#define ZF_ASSERT(expression_) ((expression_) ?\
(void)0 : ZF_assertHandle((uint8_t *)__FILE__, (int)__LINE__));
#else
#define ZF_ASSERT(expression_)
#endif /* ZF_ASSERT_ON */
#endif /* _ZF_ASSERT */
/* 断言产生时的处理 */
void ZF_assertHandle(uint8_t *pFileName, int line);
#ifdef __cplusplus
}
#endif
#endif /* __ZF_ASSERT_H__ */
/******************************** END OF FILE ********************************/
断言的处理很简单,就是告诉我们在哪个文件哪一行出错就可以,实现如下
/**
*****************************************************************************
* @file zf_assert.c
* @author Zorb
* @version V1.0.0
* @date 2018-06-28
* @brief 断言的实现
*****************************************************************************
* @history
*
* 1. Date:2018-06-28
* Author:Zorb
* Modification:建立文件
*
*****************************************************************************
*/
#include "zf_assert.h"
#include "zf_debug.h"
/******************************************************************************
* 描述 :断言产生时的处理
* 参数 :(in)-pFileName 文件名
* (in)-line 行数
* 返回 :无
******************************************************************************/
void ZF_assertHandle(uint8_t *pFileName, int line)
{
ZF_DEBUG(LOG_E, "file:%s line:%d:asserted\r\n", pFileName, line);
while (1);
}
/******************************** END OF FILE ********************************/
为了减少框架对资源的消耗,所以初步设定框架的最小时间周期为1ms,因此我们需要设置systick的定时周期为1ms,然后每次进入中断为我们的框架计数即可。
/******************************************************************************
* 描述 :SysTick中断服务程序
* 参数 :无
* 返回 :无
******************************************************************************/
void SysTick_Handler(void)
{
/* 为zorb framework提供计时 */
ZF_timeTick();
}
现在时间系统提供的功能比较基础,只有系统滴答计数和系统死等待延时,后面我们开发定时器功能和任务功能的时候会重新扩展时间系统。
/**
*****************************************************************************
* @file zf_time.h
* @author Zorb
* @version V1.0.0
* @date 2018-06-28
* @brief 系统时间的头文件
*****************************************************************************
* @history
*
* 1. Date:2018-06-28
* Author:Zorb
* Modification:建立文件
*
*****************************************************************************
*/
#ifndef __ZF_TIME_H__
#define __ZF_TIME_H__
#ifdef __cplusplus
extern "C" {
#endif
#include "stdbool.h"
#include "stdint.h"
/* 系统滴答周期(ms) */
#define ZF_TICK_PERIOD 1
/* 获取系统滴答数 */
#define ZF_SYSTICK() ZF_getSystemTick()
/* 获取系统时间(ms) */
#define ZF_SYSTIME_MS() ZF_getSystemTimeMS()
/* 系统延时(ms) */
#define ZF_DELAY_MS(ms_) do \
{ \
if (ms_ % ZF_TICK_PERIOD) \
{ \
ZF_delayTick((ms_ / ZF_TICK_PERIOD) + 1); \
} \
else \
{ \
ZF_delayTick(ms_ / ZF_TICK_PERIOD); \
} \
} while(0)
/* 获取系统滴答数 */
uint32_t ZF_getSystemTick(void);
/* 获取系统时间(ms) */
uint32_t ZF_getSystemTimeMS(void);
/* 系统延时 */
void ZF_delayTick(uint32_t tick);
/* 系统滴答程序(需挂在硬件的时间中断里边) */
void ZF_timeTick (void);
#ifdef __cplusplus
}
#endif
#endif /* __ZF_TIME_H__ */
/******************************** END OF FILE ********************************/
本篇实现的功能比较基础,但是整个框架开发的根基,后面所有扩展的功能都需要在此环境下进行开发。
搭建良好的调试输出环境,可以帮我们快速定位bug的所在,从而提高开发效率。
Github 地址
https://github.com/54zorb/Zorb-Framework
来源:https://github.com/54zorb/Zorb-Framework
文章来源于网络,版权归原作者所有,如有侵权,请联系删除。

关注【一起学嵌入式】,回复“加群”进技术交流群。
觉得文章不错,点击“分享”、“赞”、“在看” 呗!
